") 磁場定向控制(FOC)原理分析
磁場定向控制(FOC)原理分析
前言
做永磁同步電機(jī)控制繞不開FOC,本章節(jié)主要介紹FOC控制的基本原理、坐標(biāo)變換以及永磁同步電機(jī)在同步旋轉(zhuǎn)坐標(biāo)系下的數(shù)學(xué)模型,并通過Matlab/Simulink進(jìn)行永磁同步電機(jī)FOC控制算法的仿真分析。
一、FOC的基本原理
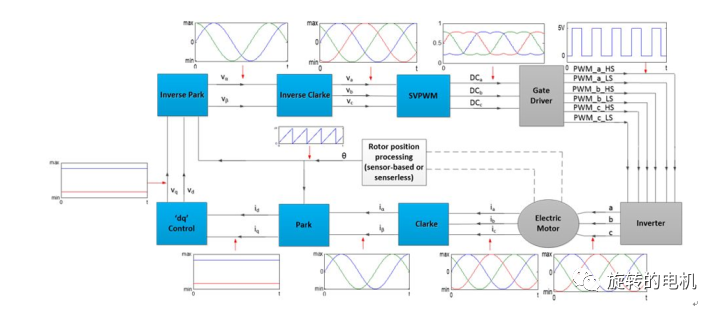
磁場定向控制(Field-Oriented Control,F(xiàn)OC)系統(tǒng)的基本思想是:通過坐標(biāo)變換,在按轉(zhuǎn)子磁場定向同步旋轉(zhuǎn)坐標(biāo)系中,得到等效的直流電動機(jī)模型,仿照直流電動機(jī)的控制方法控制電磁轉(zhuǎn)矩與磁鏈,然后將轉(zhuǎn)子磁鏈定向坐標(biāo)系中的控制量反變換得到三相坐標(biāo)系的對應(yīng)量,以實(shí)施控制,具體流程如下圖所示:
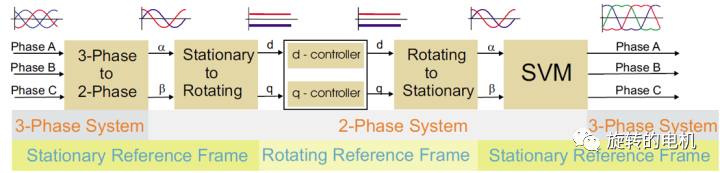
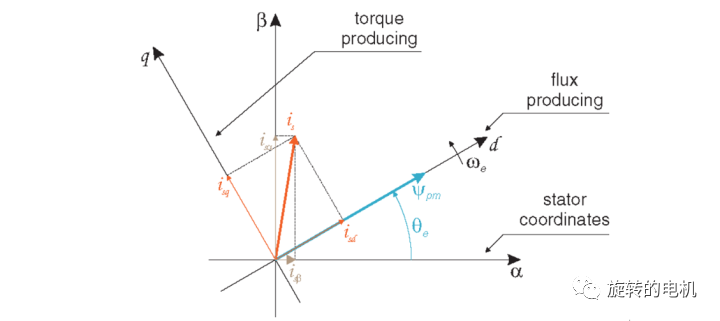
FOC最重要的原則是:按轉(zhuǎn)子磁場定向,即保持轉(zhuǎn)子磁鏈旋轉(zhuǎn)矢量始終與dq坐標(biāo)系下的d軸重合,q軸正交。通過按轉(zhuǎn)子磁場定向,將定子電流解耦為了勵磁分量 id和轉(zhuǎn)矩分量 iq。通過電流 id實(shí)現(xiàn)對轉(zhuǎn)子磁鏈的控制,電流 iq實(shí)現(xiàn)對電磁轉(zhuǎn)矩的控制,類比于直流電機(jī)的控制。對于表貼式永磁同步電機(jī)SPM,一般設(shè)置勵磁分量id =0,定子電流全部用于產(chǎn)生電磁轉(zhuǎn)矩。
FOC最主要的任務(wù)就是:通過不停的觀測轉(zhuǎn)子角度,實(shí)現(xiàn)轉(zhuǎn)子磁鏈定向,即保持轉(zhuǎn)子磁鏈旋轉(zhuǎn)矢量始終與dq坐標(biāo)系下的d軸重合,q軸正交,dq坐標(biāo)軸同轉(zhuǎn)子磁鏈同步旋轉(zhuǎn)。
二、坐標(biāo)變換
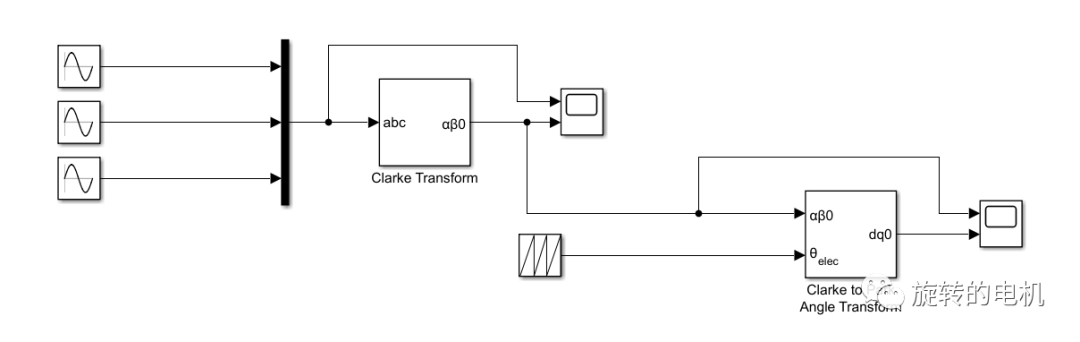
2.1.Clark坐標(biāo)變換
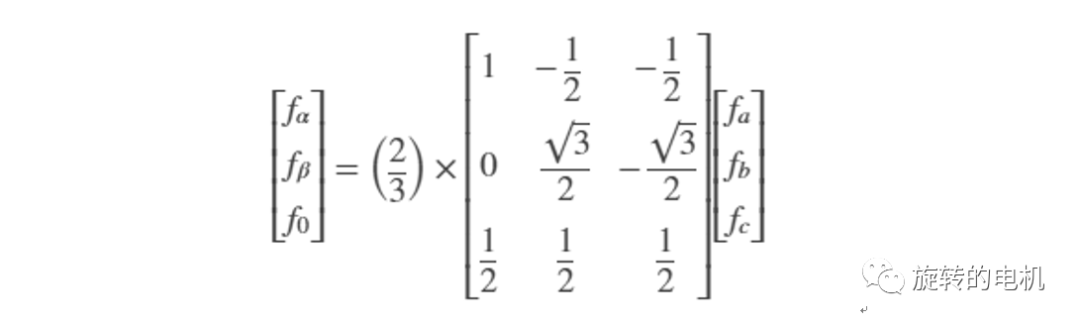
靜止坐標(biāo)變換Clark變換:
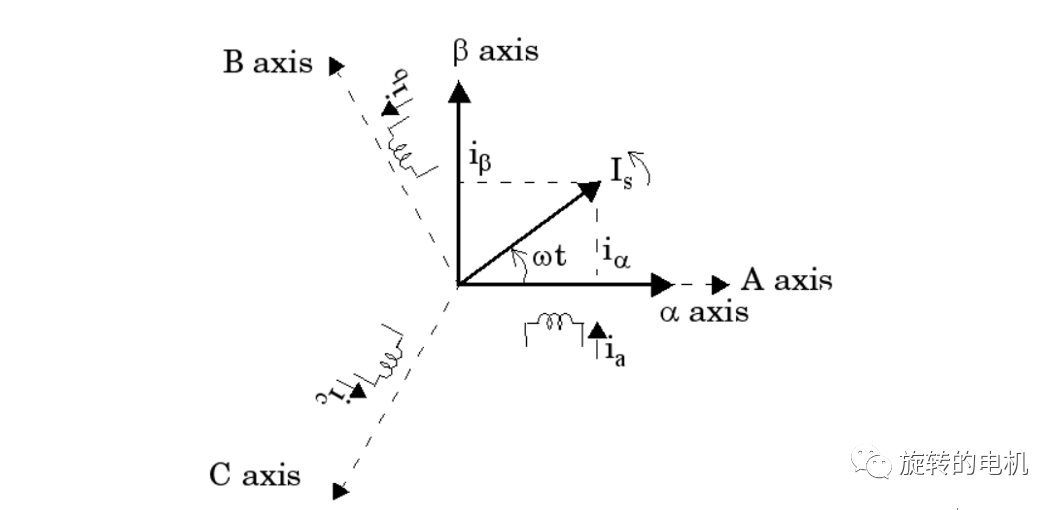
采用等幅值變換,通過下式將三相靜止坐標(biāo)系A(chǔ)BC下的電流轉(zhuǎn)換為兩相靜止坐標(biāo)系αβ下的電流:
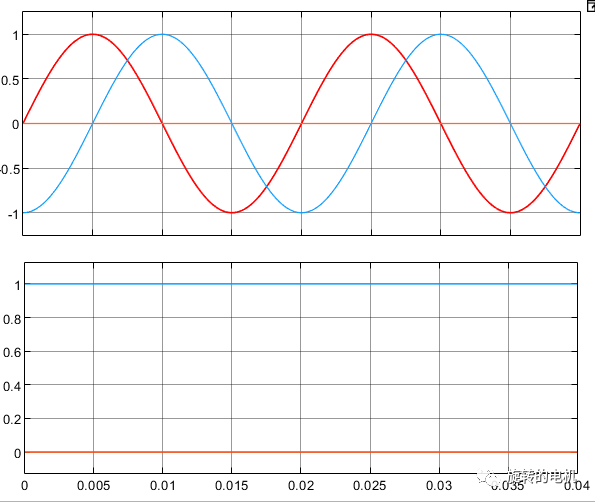
變換結(jié)果:
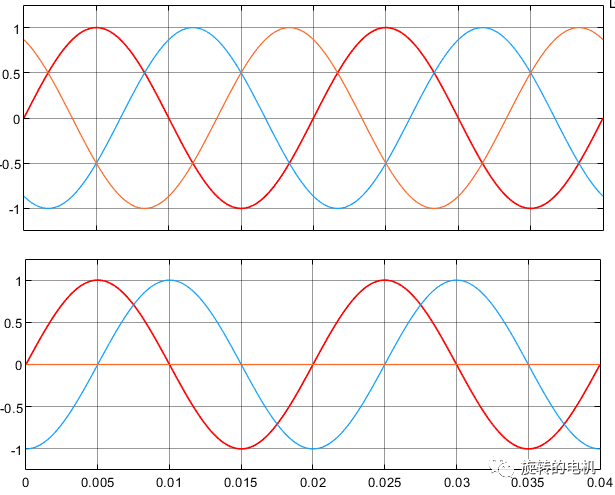
由于ia+ib+ic=0 ,因此實(shí)際中只需要三相靜止坐標(biāo)系下的兩相電流即可,通過下式進(jìn)行變換:

2.2.Park坐標(biāo)變換
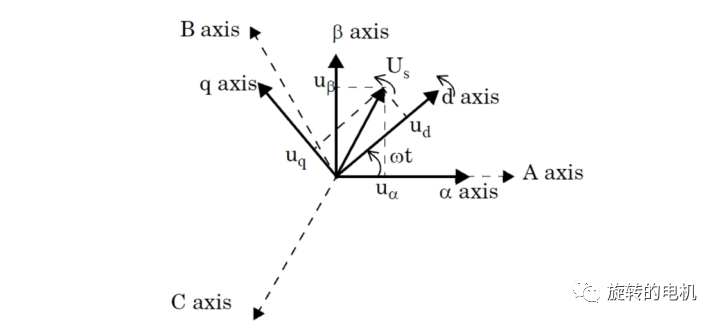
將兩相靜止坐標(biāo)系αβ下的電流轉(zhuǎn)換為同步旋轉(zhuǎn)坐標(biāo)系dq下的電流,由下式所示:

變換結(jié)果:
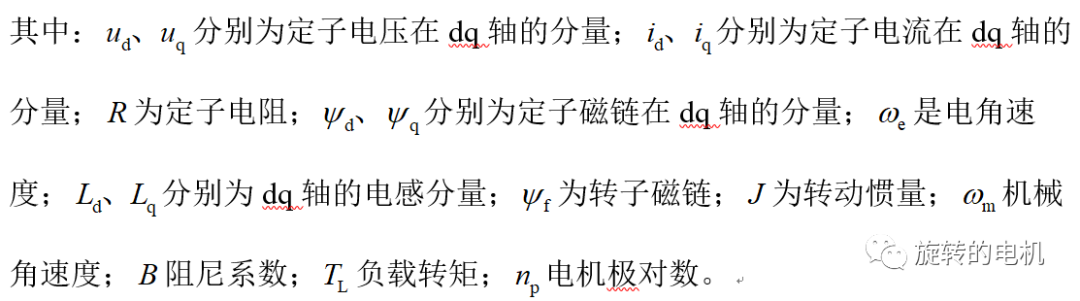
三、永磁同步電機(jī)在同步旋轉(zhuǎn)坐標(biāo)系下的數(shù)學(xué)模型
將三相自然坐標(biāo)系下的PMSM數(shù)學(xué)模型,通過坐標(biāo)變換,轉(zhuǎn)換為同步旋轉(zhuǎn)坐標(biāo)系下的數(shù)學(xué)模型。同步旋轉(zhuǎn)坐標(biāo)系的d軸與轉(zhuǎn)子磁鏈對齊,并保持同步旋轉(zhuǎn),如下所示:
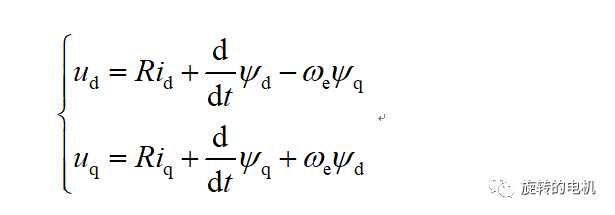
定子電壓方程:
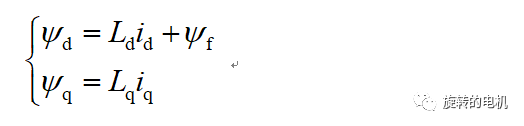
定子磁鏈方程:
電磁轉(zhuǎn)矩方程:

運(yùn)動方程:

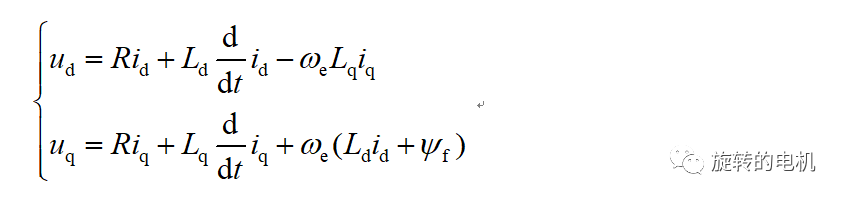
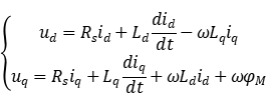
將定子磁鏈方程帶入電壓方程可得定子電壓方程為:
此時電磁轉(zhuǎn)矩方程可寫為:

由上式,通過坐標(biāo)變換將三相自然坐標(biāo)系下的PMSM數(shù)學(xué)模型變換為同步旋轉(zhuǎn)坐標(biāo)系下的數(shù)學(xué)模型,使PMSM的數(shù)學(xué)模型實(shí)現(xiàn)了解耦,可仿照直流電機(jī)的控制方法對PMSM進(jìn)行控制。
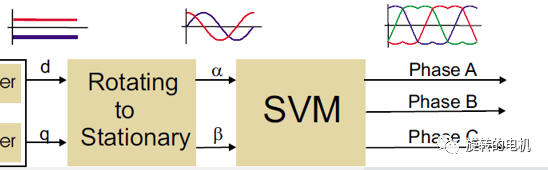
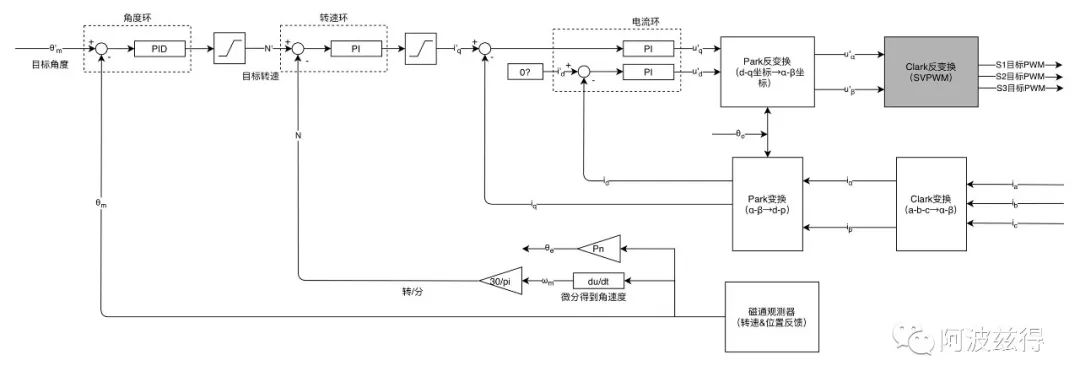
FOC的整體控制框架如下圖所示:
四、永磁同步電機(jī)磁場定向控制Matlab/Simulink仿真分析
4.1.電壓開環(huán)控制
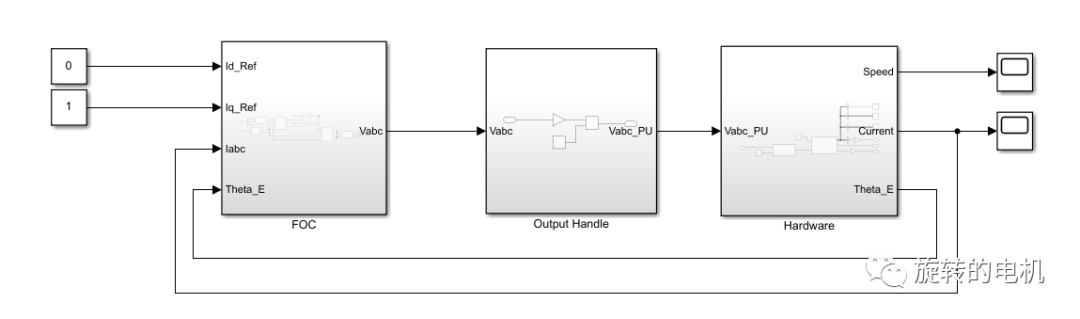
如上圖所示,直接給定同步旋轉(zhuǎn)坐標(biāo)系下的Vd,Vq電壓實(shí)現(xiàn)永磁同步電機(jī)磁場定向的電壓開環(huán)控制。Matlab/Simulink整體仿真框圖如下所示:
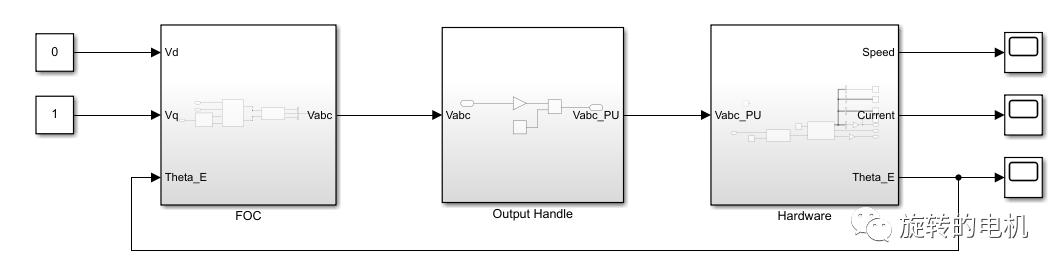
4.1.1.仿真電路分析
直接給定同步旋轉(zhuǎn)坐標(biāo)系下Vd,Vq的電壓值實(shí)現(xiàn)永磁同步電機(jī)磁場定向的電壓開環(huán)控制。
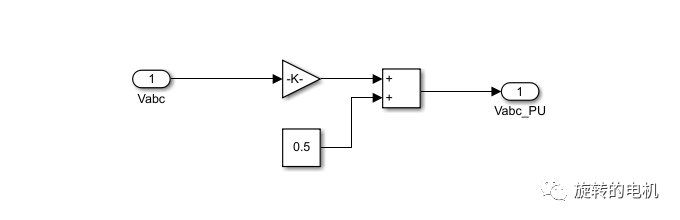
此處作了一個歸一化處理,將FOC電壓開環(huán)控制的輸出電壓(調(diào)制波形 馬鞍波)范圍設(shè)置在[0,1]之間。
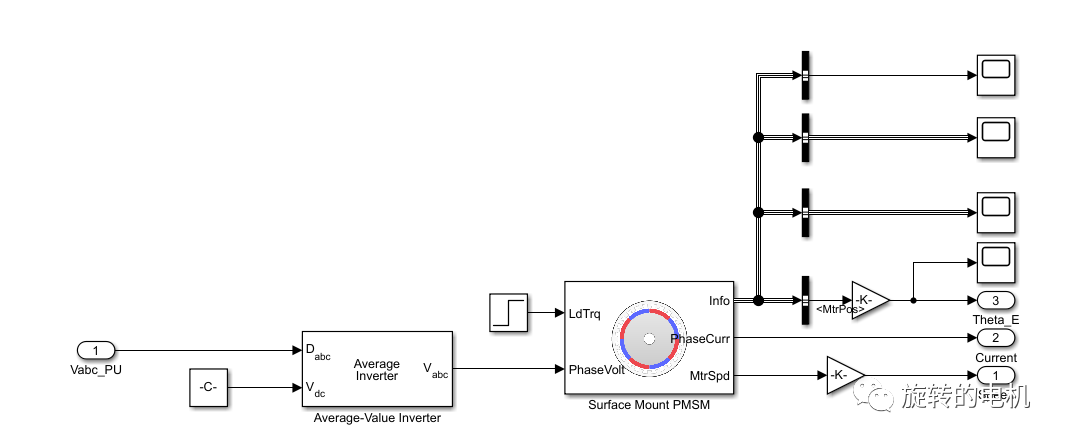
主電路包括逆變電路與永磁同步電機(jī),逆變電路如下圖所示,采用Average-Value Inverter模塊直接生成三相正弦電壓。永磁同步電機(jī)采用BR2804-1700電機(jī)(電機(jī)的參數(shù)用ST Motor Proflier測得),參數(shù)如下:
4.1.2.仿真結(jié)果分析
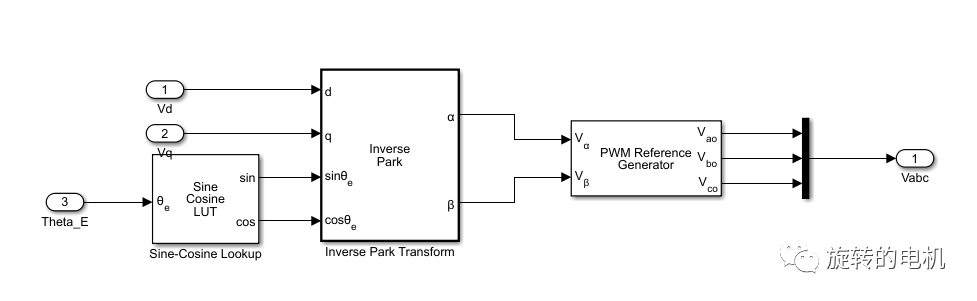
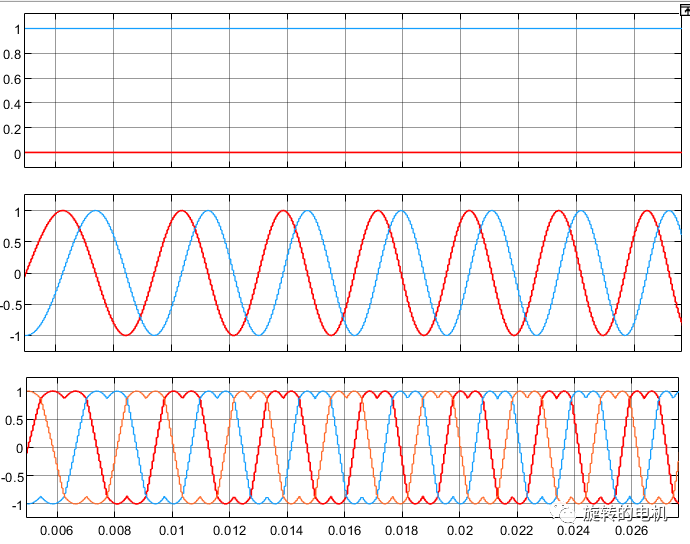
設(shè)置開環(huán)輸入電壓Vd、Vq為0和1,該電壓經(jīng)過反Park變換及SVPWM算法輸出的馬鞍波形如下:
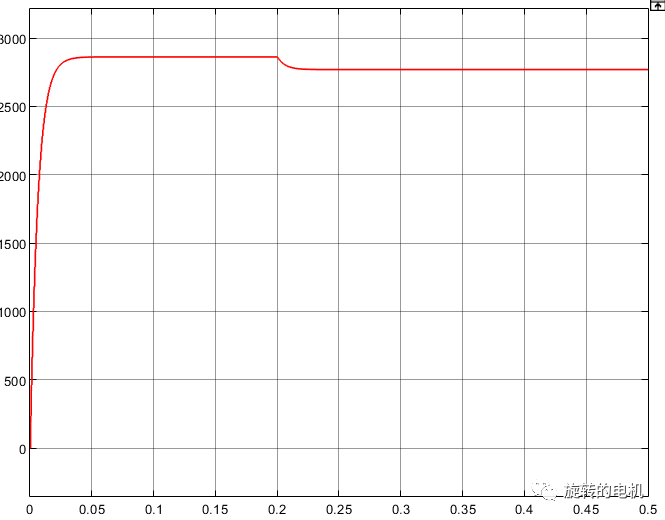
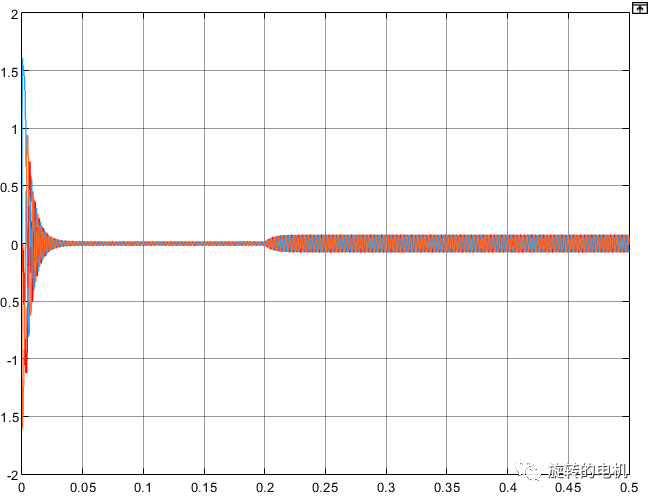
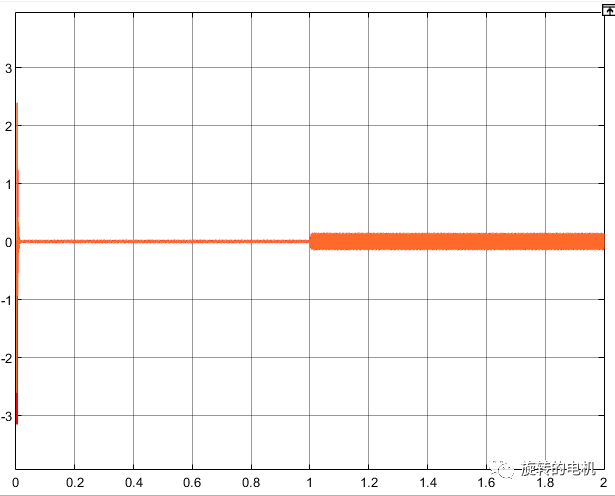
電機(jī)轉(zhuǎn)速:0.2s突加負(fù)載
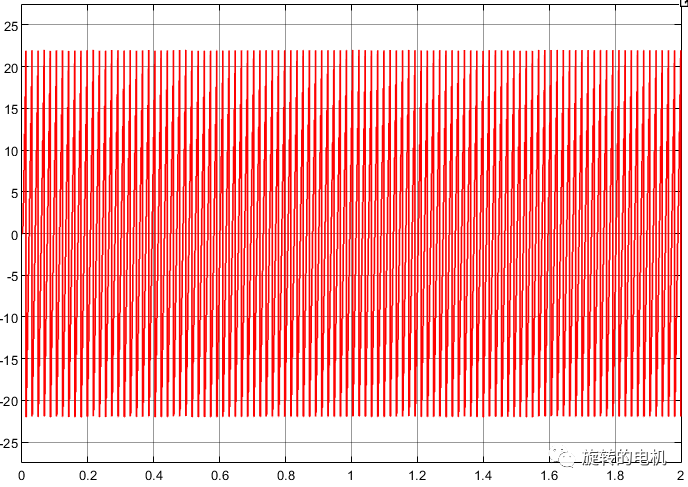
電機(jī)定子電流:
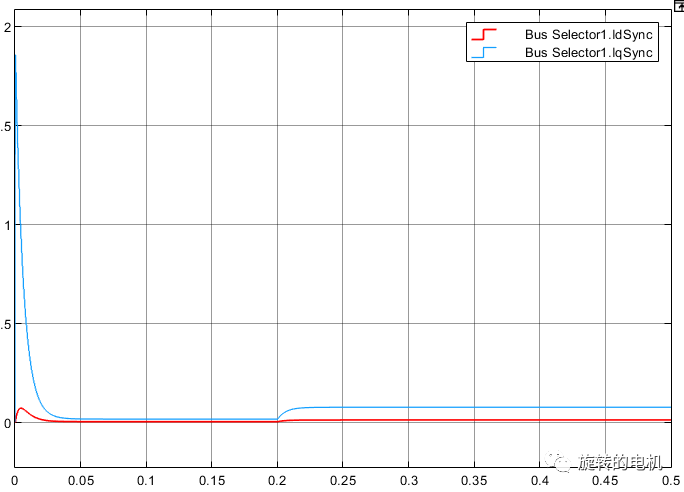
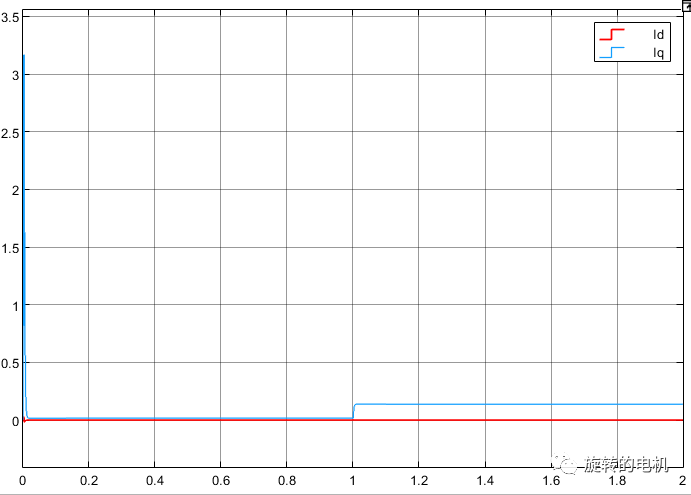
dq坐標(biāo)系下的定子電流值:
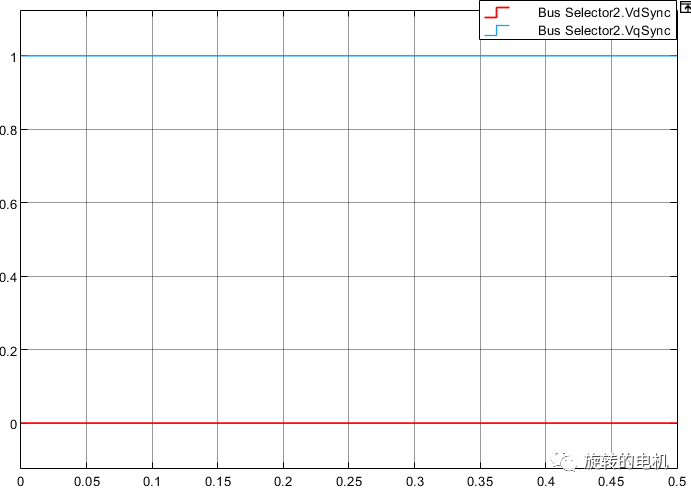
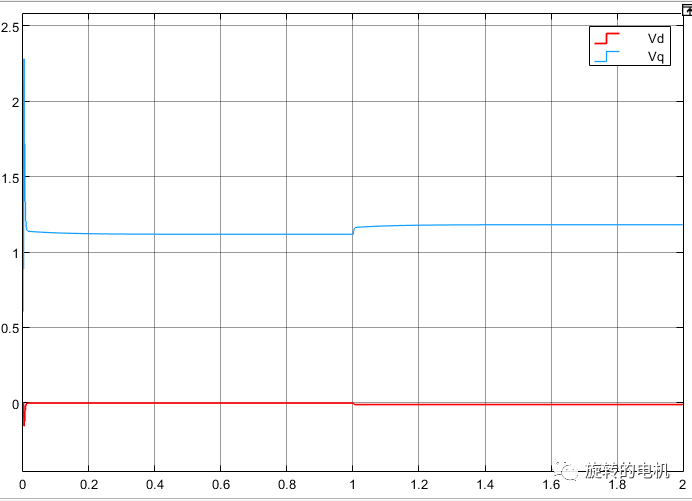
dq坐標(biāo)系下的定子電壓:
4.2.電流閉環(huán)控制

在電壓開環(huán)控制中,加入負(fù)載后dq坐標(biāo)系下的定子電流Id不等于0約為0.036,說明定子電流未完全用于產(chǎn)生電磁轉(zhuǎn)矩。引入電流閉環(huán)控制,精確的控制電機(jī)Id、Iq電流值。電流環(huán)的主要作用 是在電機(jī)啟動過程中能夠以最大的電流啟動,同時對電網(wǎng)電壓的波動起及時抗擾的作用,加快動態(tài)系統(tǒng)的響應(yīng)速度,提高系統(tǒng)的穩(wěn)定性 ,其控制框圖如上圖所示。
永磁同步電機(jī)電流閉環(huán)控制的Matlab/Simulink整體仿真框圖如下所示:
4.2.1.仿真電路分析
與電壓開環(huán)控制的不同點(diǎn)就是將定子電流進(jìn)行了反饋,設(shè)定同步旋轉(zhuǎn)坐標(biāo)下定子電流為Id_Ref、Iq_Ref,設(shè)定值與定子電流的反饋值Id、Iq進(jìn)行PI控制,PI控制器的輸出作為永磁同步電機(jī)的電壓給定,驅(qū)動PMSM。
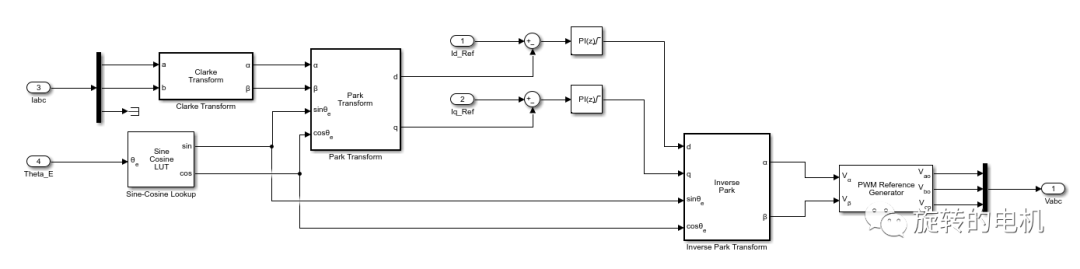
其余仿真部分同電壓開環(huán)控制。
4.2.2.仿真結(jié)果分析
設(shè)置電流參考值Id_Ref、Iq_Ref為0和1,電流參考值與Id和Iq電流反饋值的誤差經(jīng)PI調(diào)節(jié)器輸出電壓Vd、Vq用于電機(jī)控制。
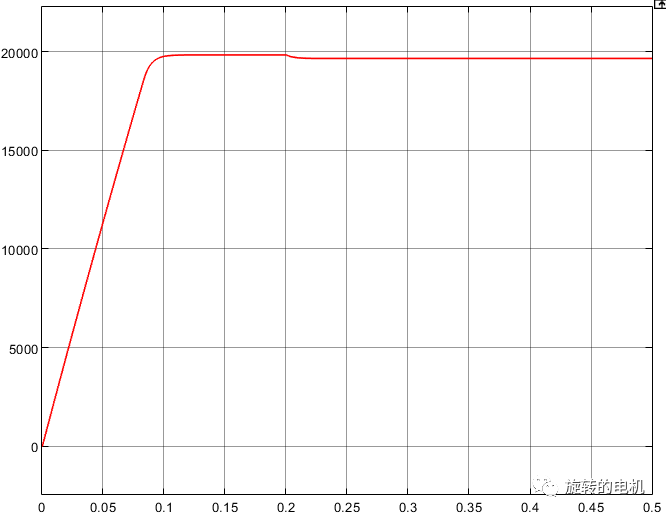
電機(jī)轉(zhuǎn)速:0.2s突加負(fù)載
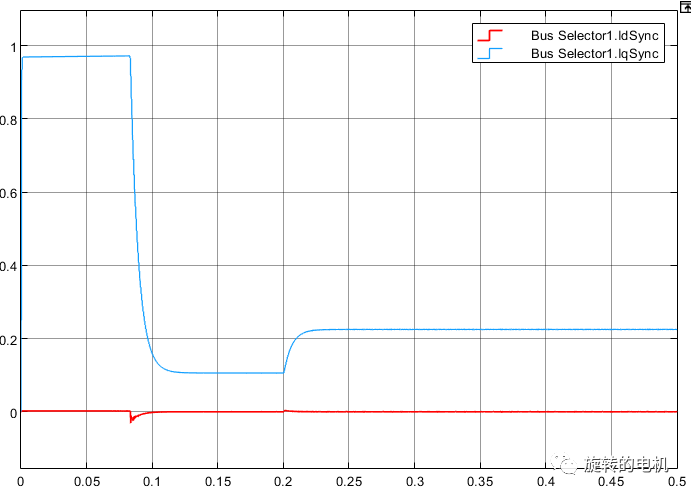
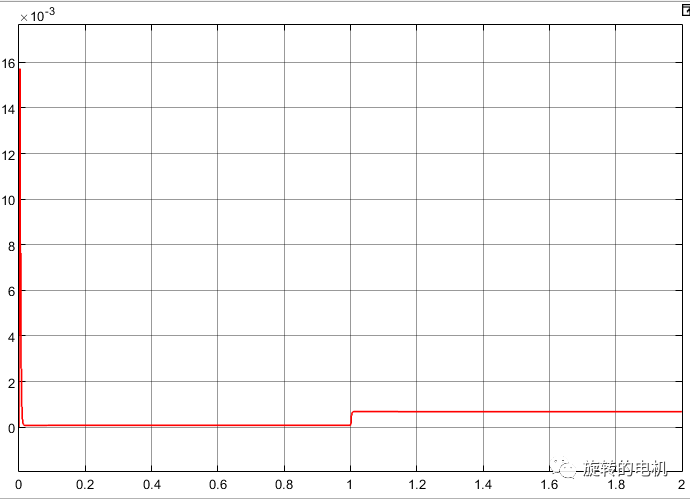
dq坐標(biāo)系下的定子電流值:電機(jī)啟動時以設(shè)定的最大電流1A進(jìn)行啟動,當(dāng)轉(zhuǎn)速達(dá)到穩(wěn)態(tài)值時電流立即降了下來,實(shí)現(xiàn)了理想最優(yōu)的啟動過渡過程。
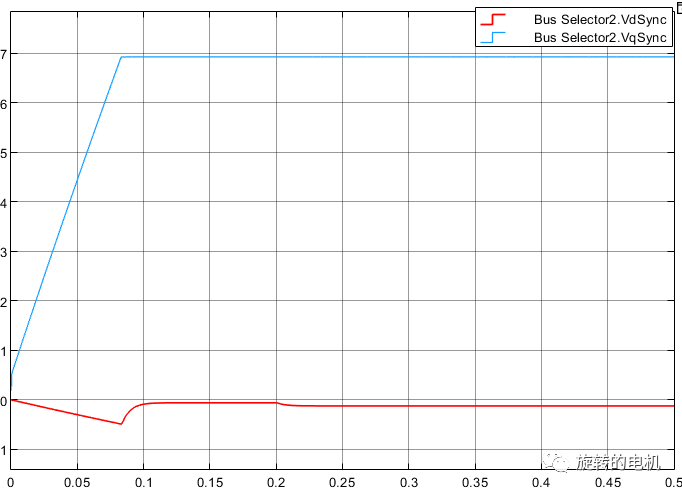
dq坐標(biāo)系下的定子電壓:
電磁轉(zhuǎn)矩:
4.3.轉(zhuǎn)速外環(huán)電流內(nèi)環(huán)雙閉環(huán)控制
在實(shí)際控制中我們一般關(guān)心轉(zhuǎn)速的變化,期望電機(jī)以設(shè)定的轉(zhuǎn)速進(jìn)行變化,這時僅靠電流閉環(huán)不太能實(shí)現(xiàn),加入轉(zhuǎn)速閉環(huán),實(shí)現(xiàn)對轉(zhuǎn)速的控制。轉(zhuǎn)速控制器的輸出為電流控制器的給定,轉(zhuǎn)速控制器的輸出要進(jìn)行限幅,因?yàn)檗D(zhuǎn)速控制器的輸出限幅值決定了所用電機(jī)的最大允許電流。
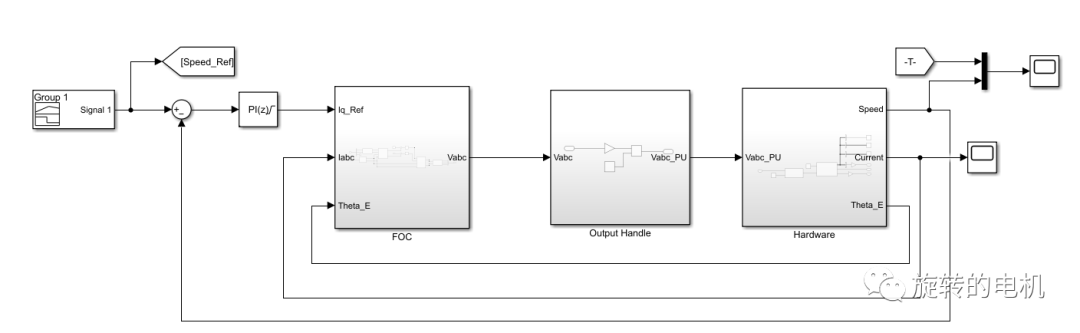
永磁同步電機(jī)轉(zhuǎn)速外環(huán)電流內(nèi)環(huán)雙閉環(huán)控制的Matlab/Simulink整體仿真框圖如下所示:
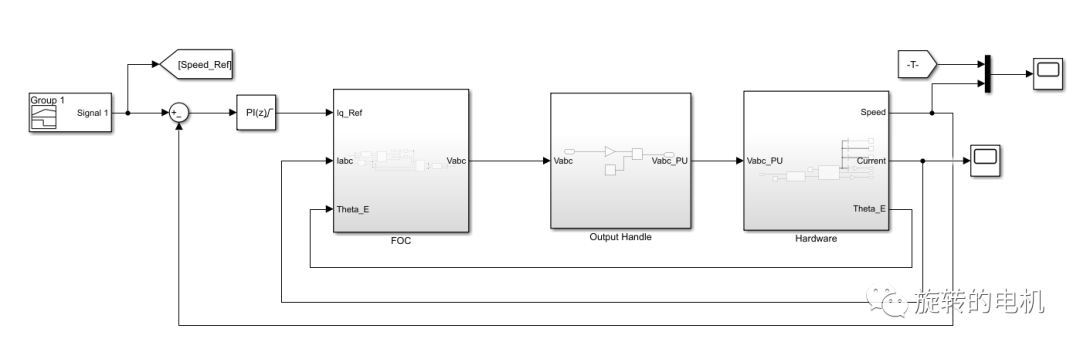
4.3.1.仿真電路分析
在電流閉環(huán)控制的基礎(chǔ)上引入了轉(zhuǎn)速閉環(huán)控制,轉(zhuǎn)速控制器的輸出作Iq電流的輸入,構(gòu)成轉(zhuǎn)速外環(huán)電流內(nèi)環(huán)雙閉環(huán)控制系統(tǒng)。
4.3.2.仿真結(jié)果分析
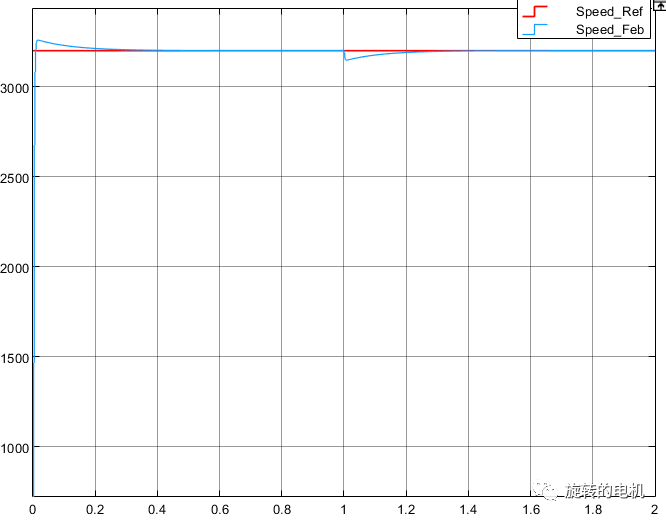
4.3.2.1設(shè)定目標(biāo)轉(zhuǎn)速為3200r/min
電機(jī)轉(zhuǎn)速:1s突加負(fù)載
電機(jī)定子電流:
電機(jī)轉(zhuǎn)子位置:
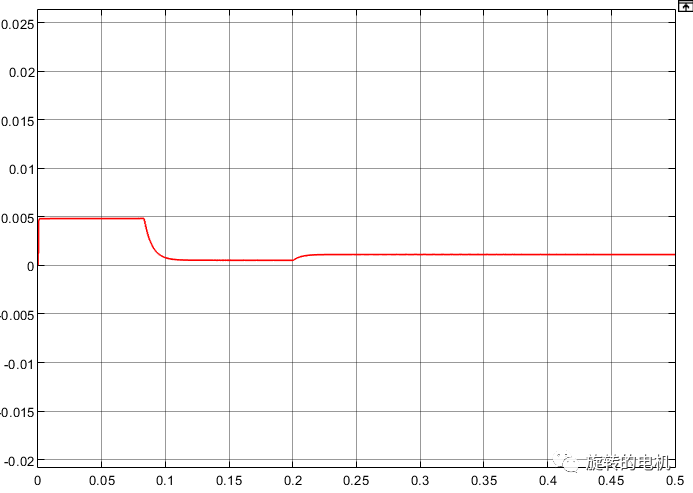
dq坐標(biāo)系下的定子電流值:
dq坐標(biāo)系下的定子電壓:
電磁轉(zhuǎn)矩:
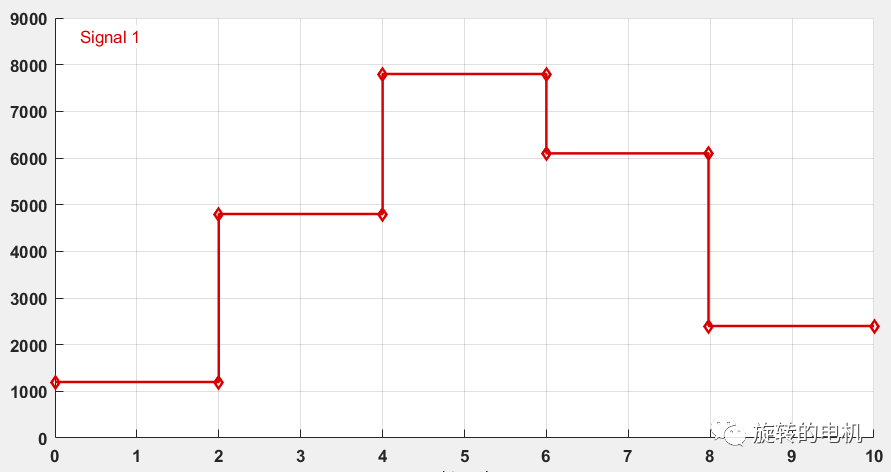
4.3.2.1設(shè)定目標(biāo)轉(zhuǎn)速為變化的值
目標(biāo)轉(zhuǎn)速:
五、小結(jié)
至此永磁同步電機(jī)FOC的基本原理及Matlab/Simulink的仿真部分就說完了。永磁同步電機(jī)的電壓開環(huán)控制、電流閉環(huán)控制、轉(zhuǎn)速外環(huán)電流內(nèi)環(huán)雙閉環(huán)控制與直流電機(jī)的控制思想一致,永磁同步電機(jī)通過坐標(biāo)變換,轉(zhuǎn)換到按轉(zhuǎn)子磁場定向的同步旋轉(zhuǎn)坐標(biāo)系中,就是為了實(shí)現(xiàn)PMSM數(shù)學(xué)模型的解耦,將PMSM等效為一個他勵“直流電機(jī)”,按直流電機(jī)的控制思想進(jìn)行PMSM的控制。有關(guān)PID控制器的參數(shù)整定、SVPWM控制算法以及永磁同步電機(jī)磁場定向矢量控制的工程實(shí)現(xiàn)會在后續(xù)進(jìn)行補(bǔ)充。
總結(jié)
本章節(jié)介紹了FOC控制的基本原理,坐標(biāo)變換以及永磁同步電機(jī)在同步旋轉(zhuǎn)坐標(biāo)系下的數(shù)學(xué)模型,并通過Matlab/Simulink進(jìn)行了永磁同步電機(jī)FOC控制算法的仿真分析,包括電壓開環(huán)控制、電流閉環(huán)控制、轉(zhuǎn)速外環(huán)電流內(nèi)環(huán)雙閉環(huán)控制,為后續(xù)章節(jié)的分析奠定基礎(chǔ)。
-
三相
+關(guān)注
關(guān)注
6文章
364瀏覽量
32709 -
電磁
+關(guān)注
關(guān)注
15文章
1075瀏覽量
51713 -
FOC
+關(guān)注
關(guān)注
20文章
318瀏覽量
42659 -
磁場定向控制
+關(guān)注
關(guān)注
0文章
15瀏覽量
10450
發(fā)布評論請先 登錄
相關(guān)推薦
采用8位微控制器實(shí)現(xiàn)無傳感器磁場定向控制
FOC控制算法的Simulink模型
如何理解foc控制 伺服電機(jī)有foc控制嗎

磁場定向矢量控制(FOC)的技術(shù)核心
感應(yīng)(異步)電機(jī)磁場定向控制(FOC)的PI參數(shù)怎么給
用于永磁同步電機(jī)(PMSM)的磁場定向控制(FOC)的設(shè)計(jì)實(shí)踐
無傳感器磁場定向控制(FOC)風(fēng)機(jī)控制原理
永磁同步電機(jī)(PMSM)磁場定向控制(FOC)電流環(huán)PI調(diào)節(jié)器參數(shù)整定

永磁同步電機(jī)磁場定向控制轉(zhuǎn)速環(huán)PI調(diào)節(jié)器參數(shù)整定
磁場矢量定向控制算法(FOC)簡介
foc如何調(diào)位置環(huán) FOC控制原理
使用TI智能柵極驅(qū)動器輕松實(shí)現(xiàn)無刷直流(BLDC)電機(jī)的磁場定向控制(FOC)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論