 串口問題常見的問題有哪些
串口問題常見的問題有哪些
什么是串口通信
串口通信,就是傳數據只有一根線傳輸,一次只能傳一個位,要傳一個字節就需要傳8次。串口通信就是把數據串在一根線上傳輸,所以就叫串口吧。
在對速率要求不高的情況,使用一根線發送數據是帶來大大的方便和實用價值的。
為了能正常發送和接收正確的數據,那異步串口通信就需要如下圖的格式。
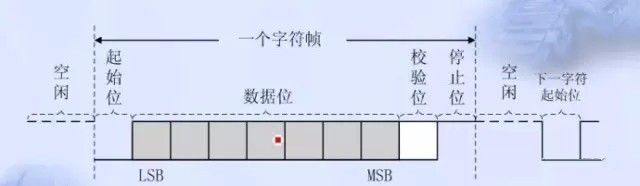
在串口的通信參數上,就有了波特率、起始位、數據位、校驗位、停止位這幾個參數。
串口通信主要為分232,485,422三種通信方式,這三種有什么區別呢?
232
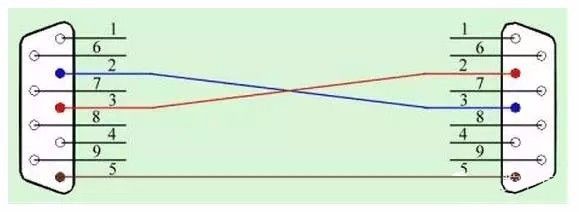
232通信主要是由RX、TX、GND三根線組成。STM32串口通信相關實例:[按下按鍵,通過串口發送數據實例]。
RX接TX,TX接RX,GND接GND。這里發送和接收分別是由不同的線處理的,也就是能同時發送數據和接收數據,這就是所謂的全雙工通信。
在這里擴展一下,串口通信還有一個功能叫做全功能串口通信,也叫標準串口。因為在兩個設備間進行數據傳輸,有些設備處理速度比較快,有些數據比較慢。為了保證數據能正常傳輸,在RX、TX的基礎上,還增加了幾個控制引腳,最后成了9個引腳,也就是常見的DB9這個東西,如下圖所示。
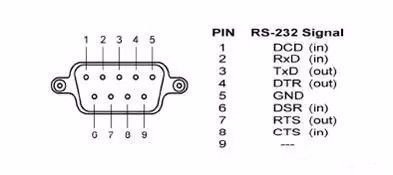
但是,如今很多控制器、人機界面、PLC等使用串口通信中一般不使用標準串口,而是直接使用RX、TX、GND三根線來通信的。
485
485的出現,是為了解決232通信距離受限的問題。
485通信只需要+、-兩根線,或者也叫A、B兩根線。A,B兩根線的差分電平信號就是作為數據信號傳輸。由于發送與接收都是用這兩根線,也就是說每次只能用作發送或者只能用作接收。所以,485是半雙工通信。
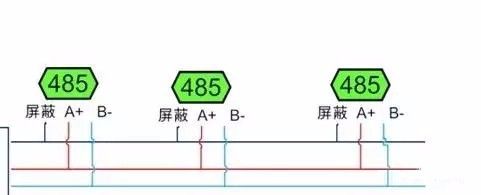
485就是這樣犧牲了232全雙工的效率來達到自己傳輸距離遠的代價。
422
422的出現,是為了既實現232的全雙工通信方式,又能像485這樣提高傳輸距離。422也常被標注為485-4,而485被標注為485-2。因為485-2是2根線,485-4是4根線,下圖是422的示意圖。
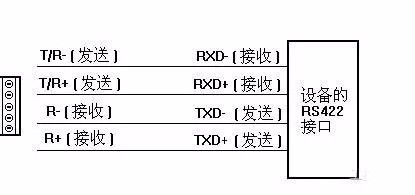
422就是把232的RX分成兩根線,RX+,RX-,把TX分成TX+,TX-。這樣就可以同時發送和同時接收了,還可以像485這樣,有較遠的傳輸距離。可是這樣一種很有優勢的通信方式,卻用的不多,最常用到的是232跟485。
串口通信常見問題
電腦使用USB轉串口可以和設備通信上,換成屏與設備就通信不上了
1)有可能電腦USB轉串口接到設備上,使用的是標準串口功能,也就是除了RX,TX,GDN外,還使用了其它引腳。比如像歐姆龍PLC,三菱PLC,在實際與屏的通信中,就需要接某些引腳短接的情況。
2)電腦與控制器或PLC通信時,是掃描波特率參數,自適應的,屏通信可能參數沒有設備好。在三菱,基恩士等PLC,就存在變化波特率進行通信交互的過程。
3)也有可能是接線方式不對。因為有些DB9,還需要公頭,母頭。如果不注意的話,也會存在把TX接到TX上,把RX接到RX上,這樣需要注意的地方。
4) 在這里補充一下,有時候可能會使用一些串口助手發送測試數據與控制器通信,有些串口助手的奇偶校驗是不起作用,這個要提醒一下。
這A家的屏可以和設備通信,換成B家的屏就通信不上了
1) 首先確認一下接線是否正確了,RX和TX是否兼容。
2) 地線是否沒有接。
3) 除了RX,TX,GND,是否還有其它引腳需要短接的。
4) 通信協議是否一致或不完善,波特率是否一樣。
以前不接地線可以通信,換個設備為什么需要接地線了
這個問題和上一個類似,因為有些設備使用了隔離電源。以前不接地可以通信,有可能實際上地線已經接了,所以才可以通信。可能換了個帶隔離電源的,兩個設備的地是隔離的,就需要在串口上把地線接起來。這個我是自身經歷過的,有個客戶老說他的設備通信不上,后來拍個照我給我,他地線沒有接,他說以前不接地線可以通信的。于是我就給他科普了一下。
一個設備是232,另一個設備是422,沒有轉換設備,怎么辦
這個情況我遇到過,客戶的設備是422通信的,但是我手上并沒有422設備,只有232通信可以測試。因此就需要把422轉成232進行通信。
剛才也講了422和232的接線,因為這兩個都是全雙工的,接收和發送都是分到的,而422只是以一種差分信號進行傳輸。
把422的Rx+與232的TX接,422的RX-與232的GND接。
把422的TX+與232的RX接,422的TX-與232的GDN接。
這樣,422設備要發送數據的,就可以發送到了232的RX上。232的TX發數據后,由于TX和GND也形成了差分信號給422,422就可以接收到數據了。
用232通信沒問題,用485通信沒問題,使用232轉485之后就通信不穩定
232和485從通信原理上,最大一個差別是全雙工和半雙工的區別。可是應用層發送數據和接收數據才不管底下是全雙工還是半雙工。
但是485就得管了。因為既然是半雙工,就得嚴格保證通路上只能有發送或只能有接收的數據,一旦同時有發送和接收,數據就會沖突了。所以解決的辦法就是主站設備,也就是主動命令的一方就需要嚴格控制好發送數據命令的節奏了。當然有些232轉485的設備做的比較好了,可以優化這個,但是主站還是要控制,比較把通信速率調節慢一些。
要想實現兩個屏或兩個主站通過485訪問modbus設備,有什么好的辦法
在485通信中,基本上是一主多從。但是遇到一些客戶實際使用中,有客戶想用兩個屏來訪問一個modbus設備的。目前暫時還沒有好的辦法。等這個功能出來后,再來給大家演示操作吧。
串口通信的弱點
1)信號干擾的問題
建議使用帶屏蔽線,接線要嚴格,比如要接地。有些485通信上,還考慮接上終端電阻來匹配。如果是232,盡量不要讓線太長。通信協議上盡量避免長報文的數據通信。
2)波特率匹配的問題
因為有些設備的計算的波特率是存在誤差的,特別是一些控制器,由于使用的晶振不一樣。因此在一些波特率比如9600波特率就存在誤差。存在誤差帶來的影響是什么呢。因為接收方是通過時間來計算一個位的。那么如果一個報文過長,就會存在誤差積累的問題,算著算著就偏了。所以,這也是串口通信不穩定的一些地方,在使用上應注意避免發送太長數據的包。
3)在一些可能會存在干擾的情況,可以考慮使用奇校驗或者偶校驗
因為雖說出現錯誤的可能性不大,但既然存在干擾,如果加了校驗,至少可以把錯誤的報文過濾掉。總好比沒有校驗然后通信數據錯了不知道。或者盡量使用一些帶校驗的協議,防止數據出錯。
4) 串口通信本來就比較慢,請降低對數據響應的要求
因為串口通信本身就比以太網慢。而且,串口通信并不是能像CPU那樣多線程處理。因為就一個口一個線數據出去,即便你應用到程序再怎么用多線程處理數據,但是最底下也只有一個口出去,一次也只能傳一個位,一個字節過去。因為有客戶在使用9600的波特率通信,但是又希望多少的數據可以在多少毫秒內得到響應。
但是串口通信還是要事實求是,所以正確認識串口通信對應用,對開發,對溝通都有著很大的幫助的。
為什么不用同步通信
剛才提到,同步通信需要依賴于時鐘信號。這就存在一個問題,這個時鐘信號是誰來發起呢。在同步通信中,往往需要一個主設備發起時鐘信號讀從模塊的數據。在實際中,有屏讀PLC,有屏讀屏的數據。而單純地從異步串口通信來說,是沒有主從之說,雙方都是平等的角色,都可以互發信息,互收信息。而同步通信一般是應用于CPU讀一些模塊,由CPU發起時鐘信號,比如讀SD卡模塊,就可以通過SPI方式,還有一些傳感器模塊。
-
控制器
+關注
關注
112文章
16203瀏覽量
177411 -
STM32
+關注
關注
2266文章
10871瀏覽量
354806 -
串口通信
+關注
關注
34文章
1620瀏覽量
55425 -
GND
+關注
關注
2文章
529瀏覽量
38656
發布評論請先 登錄
相關推薦
常見串口通信的幾個問題請教?
stm32_常見串口、串口通信分類、UART編程套路以及注意事項

串口通信是什么,常見的問題以及解決方法
【分享】什么是串口通信?串口常見通信問題如何解決?






 工商網監
工商網監
評論