 安卓端的串口通信實踐講解2
安卓端的串口通信實踐講解2
和原生 API 不同的是,因為我們此時已經知道了我們的 ESP32 主板的設備信息,以及使用的驅動(CDC),所以我們就不使用原生的查找可用設備的方法了,我們這里直接指定我們已知的這個設備(當然,你也可以繼續使用原生API的查找和連接方法):
private fun scanDevice(context: Context) {
val manager = context.getSystemService(Context.USB_SERVICE) as UsbManager
val customTable = ProbeTable()
// 添加我們的設備信息,三個參數分別為 vendroId、productId、驅動程序
customTable.addProduct(0x1a86, 0x55d3, CdcAcmSerialDriver::class.java)
val prober = UsbSerialProber(customTable)
// 查找指定的設備是否存在
val drivers: List
連接到設備后,下一步就是和數據交互,這里封裝的十分方便,只需要獲取到 UsbSerialPort 后,直接調用它的 read() 和 write() 即可讀寫數據:
port = driver.ports[0] // 大多數設備都只有一個 port,所以大多數情況下直接取第一個就行
port.open(connection)
// 設置連接參數,波特率9600,以及 “8N1”
port.setParameters(9600, 8, UsbSerialPort.STOPBITS_1, UsbSerialPort.PARITY_NONE)
// 讀取數據
val responseBuffer = ByteArray(1024)
port.read(responseBuffer, 0)
// 寫入數據
val sendData = byteArrayOf(0x6F)
port.write(sendData, 0)
此時,一個完整的,用于測試我們上述 ESP32 程序的代碼如下:
@Composable
fun SerialScreen() {
val context = LocalContext.current
Column(
Modifier.fillMaxSize(),
verticalArrangement = Arrangement.Center,
horizontalAlignment = Alignment.CenterHorizontally
) {
Button(onClick = { scanDevice(context) }) {
Text(text = "查找并連接設備")
}
Button(onClick = { switchLight(true) }) {
Text(text = "開燈")
}
Button(onClick = { switchLight(false) }) {
Text(text = "關燈")
}
}
}
private fun scanDevice(context: Context) {
val manager = context.getSystemService(Context.USB_SERVICE) as UsbManager
val customTable = ProbeTable()
customTable.addProduct(0x1a86, 0x55d3, CdcAcmSerialDriver::class.java)
val prober = UsbSerialProber(customTable)
val drivers: List
運行這個程序,并且連接設備。
可以看到輸出的是 byte 的 101,轉換為 ASCII 即為 “e”。
然后我們點擊 “開燈”、“關燈” 效果如下:

對了,這里發送的數據 “0x6F” 即 ASCII “o” 的十六進制,同理,“0x63” 即 “c”。
可以看到,可以完美的和我們的 ESP32 開發版進行通信。
實例
無論使用什么方式與串口通信,我們在安卓APP的代碼層面能夠拿到的數據已經是處理好了的數據。
即,在上一篇文章中我們說過串口通信的一幀數據包括起始位、數據位、校驗位、停止位。但是我們在安卓中使用時一般拿到的都只有 數據位 的數據,其他數據已經在底層被解析好了,無需我們去關心怎么解析,或者使用。
我們可以直接拿到的就是可用數據。
這里舉一個我之前用過的某型號驅動版的例子。
這塊驅動版關于通信的信息如圖:
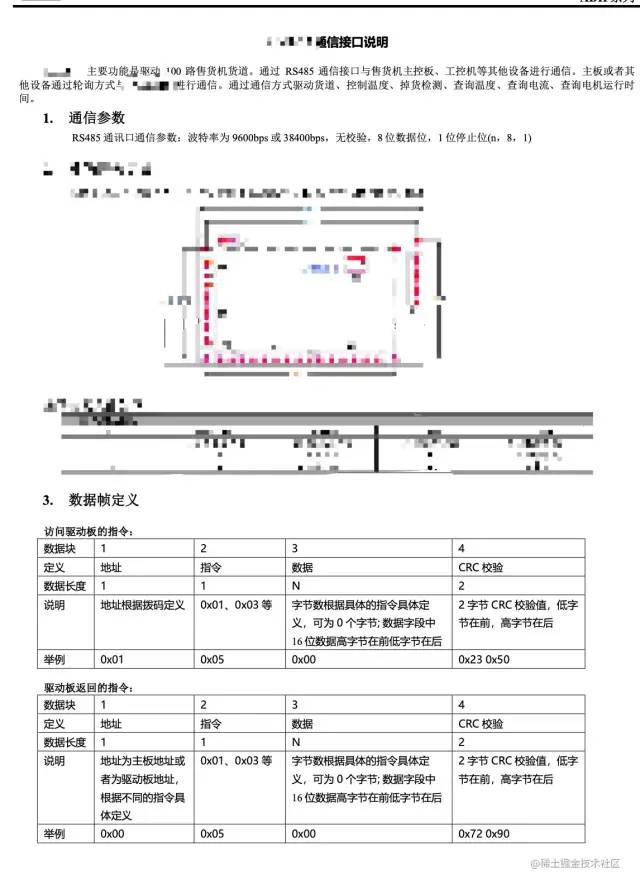
可以看到,它采用了 RS485 的通信方式,波特率支持 9600 或 38400,8位數據位,無校驗,1位停止位。
并且,它還規定了一個數據協議。
在它定義的協議中,第一位為地址;第二位為指令;第三位到第N位為數據內容;最后兩位為CRC校驗。
需要注意的是,這里定義的協議是基于串口通信的,不要把這個協議和串口通信搞混了,簡單來說就是在串口通信協議的數據位中又定義了一個自己的協議。
而且可以看到,雖然定義串口參數時沒有指定校驗,但是在它自己的協議中指定了使用 CRC 校驗。
另外,弱弱的吐槽一句,這個驅動版的協議真的不好使。
在實際使用過程中,主機與驅動版的通信數據無法保證一定會在同一個數據幀中發送完成,所以可能會造成“粘包”、“分包”現象,也就是說,數據可能會分幾次發過來,而且你不好判斷這數據是上次沒發送完的數據還是新的數據。
我使用過的另外一款驅動版就方便的多,因為它會在幀頭加上開始符號和數據長度,幀尾加上結束符號。
這樣一來,即使出現“粘包”、“分包”我們也能很好的給它解析出來。
當然,它這樣設計協議肯定是有它的道理的,無非就是減少通信代價之類的。
我還遇到過一款十分簡潔的驅動版,直接發送一個整數過去表示執行對應的指令。
驅動版回傳的數據同樣非常簡單,就是一個數字,然后事先約定各個數字表示什么意思……
說歸說,我們還是繼續來看這款驅動版的通信協議:
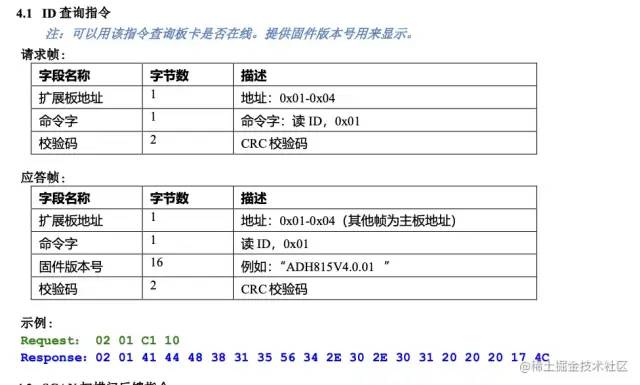
這是它的其中一個指令內容,我們發送指令 “1” 過去后,它會返回當前驅動版的型號和版本信息給我們。
因為我們的主板是定制工控主板,所以使用的通信方式是直接用 android-serialport-api。
最終發送與接收回復也很簡單:
/**
* 將十六進制字符串轉成 ByteArray
* */
private fun hexStrToBytes(hexString: String): ByteArray {
check(hexString.length % 2 == 0) { return ByteArray(0) }
return hexString.chunked(2)
.map { it.toInt(16).toByte() }
.toByteArray()
}
private fun isReceivedLegalData(receiveBuffer: ByteArray): Boolean {
val rcvData = receiveBuffer.copyOf() //重新拷貝一個使用,避免原數據被清零
if (cmd.cmdId.checkDataFormat(rcvData)) { //檢查回復數據格式
isPkgLost = false
if (cmd.cmdId.isResponseBelong(rcvData)) { //檢查回復命令來源
if (!AdhShareData.instance.getIsUsingCrc()) { //如果不開啟CRC檢驗則直接返回 true
resolveRcvData(cmdRcvDataCallback, rcvData, cmd.cmdId)
coroutineScope.launch(Dispatchers.Main) {
cmdResponseCallback?.onCmdResponse(ResponseStatus.Success, rcvData, 0, rcvData.size, cmd.cmdId)
}
return true
}
if (cmd.cmdId.checkCrc(rcvData)) { //檢驗CRC
resolveRcvData(cmdRcvDataCallback, rcvData, cmd.cmdId)
coroutineScope.launch(Dispatchers.Main) {
cmdResponseCallback?.onCmdResponse(ResponseStatus.Success, rcvData, 0, rcvData.size, cmd.cmdId)
}
return true
}
else {
coroutineScope.launch(Dispatchers.Main) {
cmdResponseCallback?.onCmdResponse(ResponseStatus.FailCauseCrcError, ByteArray(0), -1, -1, cmd.cmdId)
}
return false
}
}
else {
coroutineScope.launch(Dispatchers.Main) {
cmdResponseCallback?.onCmdResponse(ResponseStatus.FailCauseNotFromThisCmd, ByteArray(0), -1, -1, cmd.cmdId)
}
return false
}
}
else { //數據不符合,可能是遇到了分包,繼續等待下一個數據,然后合并
isPkgLost = true
return isReceivedLegalData(cmd)
/*coroutineScope.launch(Dispatchers.Main) {
cmdResponseCallback?.onCmdResponse(ResponseStatus.FailCauseWrongFormat, ByteArray(0), -1, -1, cmd.cmdId)
}
return false */
}
}
// ……省略初始化和連接代碼
// 發送數據
val bytes = hexStrToBytes("0201C110")
outputStream.write(bytes, 0, bytes.size)
// 解析數據
val recvBuffer = ByteArray(0)
inputStream.read(recvBuffer)
while (receiveBuffer.isEmpty()) {
delay(10)
}
isReceivedLegalData()
本來打算直接發我封裝好的這個驅動版的協議庫的,想了想,好像不太合適,所以就大概抽出了這些不完整的代碼,懂這個意思就行了,哈哈。
總結
從上面介紹的兩種方式可以看出,兩種方式使用各有優缺點。
使用 android-serialport-api 可以直接讀取串口數據內容,不需要轉USB接口,不需要驅動支持,但是需要 ROOT,適合于定制安卓主板上已經預留了 RS232 或 RS485 接口且設備已 ROOT 的情況下使用。
而使用 USB host ,可以直接讀取USB接口轉接的串口數據,不需要ROOT,但是只支持有驅動的串口轉USB芯片,且只支持使用USB接口,不支持直接連接串口設備。
各位可以根據自己的實際情況靈活選擇使用什么方式來實現串口通信。
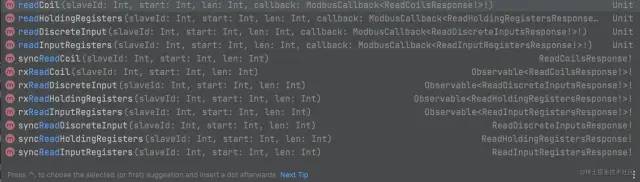
當然,除了現在介紹的這些串口通信,其實還有一個通信協議在實際使用中用的非常多,那就是 MODBUS 協議。
-
plc
+關注
關注
5008文章
13167瀏覽量
462188 -
串口通信
+關注
關注
34文章
1620瀏覽量
55428 -
安卓
+關注
關注
5文章
2122瀏覽量
57038 -
ESP32
+關注
關注
18文章
960瀏覽量
17114
發布評論請先 登錄
相關推薦
Matlab的串口通信實現
安卓與ESP8266串口WIFI模塊的通信實現相關資料推薦
STM32 USART串口通信實踐
基于串口的LABVIEW與PLC的通信實現
STM32 串口通信實驗






 工商網監
工商網監
評論