") 如何克服在芯片上設(shè)計(jì)耐輻射運(yùn)動(dòng)控制系統(tǒng)的挑戰(zhàn)
如何克服在芯片上設(shè)計(jì)耐輻射運(yùn)動(dòng)控制系統(tǒng)的挑戰(zhàn)
在設(shè)計(jì)耐輻射運(yùn)動(dòng)控制系統(tǒng)片上(SoC)時(shí),需要考慮許多挑戰(zhàn)。第一個(gè)設(shè)計(jì)挑戰(zhàn)是運(yùn)動(dòng)控制系統(tǒng)本身。此類空間應(yīng)用通常涉及概念化可支持各種運(yùn)動(dòng)控制應(yīng)用的多功能部件。這涉及將電路劃分為可實(shí)現(xiàn)的功能,這些功能可以在用于特定模塊的IC工藝的預(yù)期功率和額定電壓限制內(nèi)實(shí)現(xiàn)。
下一個(gè)挑戰(zhàn)是工藝工程師必須找到或開發(fā)一種能夠有效實(shí)施模塊的耐輻射工藝技術(shù)。由于實(shí)現(xiàn)某些模擬功能時(shí)所需的接地差和電平轉(zhuǎn)換,運(yùn)動(dòng)控制電路模塊的電路設(shè)計(jì)很困難。由于某些普遍可用的設(shè)備不可用,電路設(shè)計(jì)任務(wù)更加復(fù)雜,這些設(shè)備由于其輻射不耐受而無法使用。
因此,電路設(shè)計(jì)人員必須找到創(chuàng)新技術(shù)來解決這些限制。必須為控制器編寫數(shù)字代碼,以實(shí)現(xiàn)必要的算法并在測(cè)試臺(tái)上進(jìn)行驗(yàn)證,并且測(cè)試工程師必須證明該部件在極端環(huán)境和輻射暴露下的功能。
在本博客中,我們將探討在空間應(yīng)用中實(shí)現(xiàn)運(yùn)動(dòng)控制時(shí)的七個(gè)主要挑戰(zhàn)。
? 系統(tǒng)定義和規(guī)范
? 設(shè)計(jì)分區(qū)
? 電路設(shè)計(jì)
? 工藝開發(fā)和表征
? 功能分區(qū)和封裝設(shè)計(jì)
? 數(shù)字IP模塊開發(fā)
? 輻射測(cè)試
以Microchip的LX7720輻射抗輻射電機(jī)控制器和位置傳感IC為例,我們將揭示克服這些挑戰(zhàn)的方法。
系統(tǒng)定義和規(guī)范
系統(tǒng)定義從分析應(yīng)用程序及其需求開始。在運(yùn)動(dòng)控制系統(tǒng)中,通常有一個(gè)電動(dòng)機(jī)提供機(jī)電能量轉(zhuǎn)換和位置反饋,以監(jiān)控運(yùn)動(dòng)的進(jìn)度。電機(jī)通常是三相無刷直流 (BLDC) 電機(jī)或步進(jìn)電機(jī),通常由衛(wèi)星總線電源軌供電,范圍為 22V 至 150V。可以使用編碼器、霍爾效應(yīng)傳感器或旋轉(zhuǎn)變壓器監(jiān)控電機(jī)軸的運(yùn)動(dòng)。旋轉(zhuǎn)變壓器還用于監(jiān)控天線等結(jié)構(gòu)的旋轉(zhuǎn)。如果執(zhí)行器的結(jié)果是線性運(yùn)動(dòng),則可以使用線性可變差動(dòng)變壓器(LVDT)。由于位置信息通常用于運(yùn)動(dòng)控制系統(tǒng),因此需要具有大功率開關(guān)驅(qū)動(dòng)器的集成位置傳感接口。對(duì)于許多應(yīng)用,首選具有外部電機(jī)驅(qū)動(dòng)開關(guān),以優(yōu)化電機(jī)的電壓和電流要求。
這些因素決定了我們的抗輻射設(shè)計(jì)電機(jī)控制IC LX7720的基本要求。
設(shè)計(jì)分區(qū)
劃分通用設(shè)計(jì)方法的第一步是在所有不同的應(yīng)用程序中尋找共同元素。BLDC 電機(jī)需要某種類型的開關(guān)設(shè)備來排序和調(diào)節(jié)流向電機(jī)線圈的電流。許多應(yīng)用需要半橋配置的脈寬調(diào)制開關(guān)。步進(jìn)電機(jī)可以使用高邊、低邊或半橋驅(qū)動(dòng)器,如果是雙極步進(jìn)電機(jī),則需要兩個(gè)全橋輸出。參見圖1。
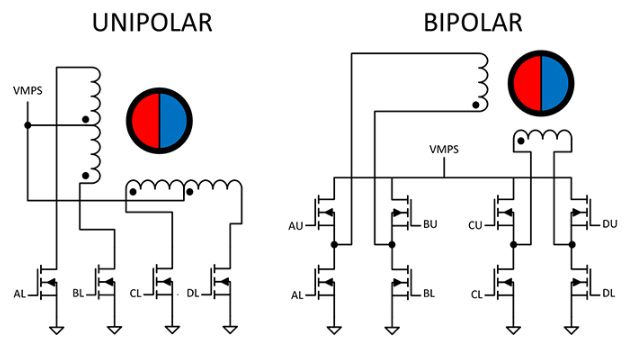
圖 1:兩相步進(jìn)電機(jī)配置。
電路設(shè)計(jì)
在設(shè)計(jì)半橋驅(qū)動(dòng)器時(shí),眾所周知,N溝道金屬氧化物半導(dǎo)體場(chǎng)效應(yīng)晶體管(MOSFET)作為開關(guān)的性能通常優(yōu)于同等尺寸的P溝道MOSFET;因此,尺寸和具有成本效益的系統(tǒng)將利用所有NMOS功率開關(guān)和浮動(dòng)高邊驅(qū)動(dòng)器。所有閉環(huán)電機(jī)控制算法都需要電流檢測(cè),因?yàn)殡姍C(jī)轉(zhuǎn)矩與線圈電流成正比。多功能系統(tǒng)設(shè)計(jì)將提供浮動(dòng)電流檢測(cè),可配置為電源線(高壓側(cè))檢測(cè)、接地電流檢測(cè)和電機(jī)端子(直列)電流檢測(cè)。以半橋配置的開關(guān)節(jié)點(diǎn)為基準(zhǔn)的電流檢測(cè)帶來了從大共模電壓信號(hào)和極快的共模壓擺率中提取微小電流檢測(cè)電壓的挑戰(zhàn)。
旋轉(zhuǎn)變壓器或LVDT等位置傳感器由勵(lì)磁器基準(zhǔn)驅(qū)動(dòng)的變壓器初級(jí)組成。必須對(duì)變壓器次級(jí)進(jìn)行采樣以提取位置信息。稱為跟蹤轉(zhuǎn)換的閉環(huán)系統(tǒng)可以根據(jù)加速度、速度和位置誤差來補(bǔ)償已知的延遲。參見圖 2。
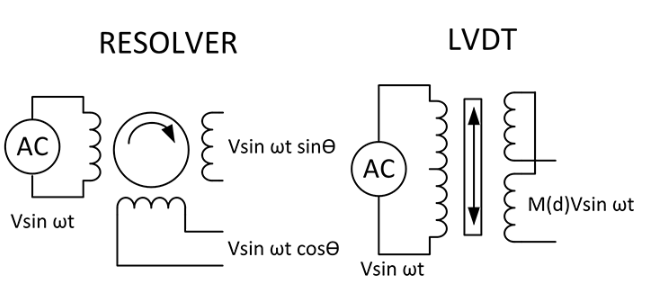
圖 2:旋轉(zhuǎn)變壓器和 LVDT
用于控制永磁同步電機(jī)(PMSM)的算法與控制步進(jìn)電機(jī)所需的算法有很大不同。多功能系統(tǒng)具有可編程邏輯以適應(yīng)應(yīng)用。使用LX7720考慮了上述所有屬性的多功能系統(tǒng)如圖3所示。
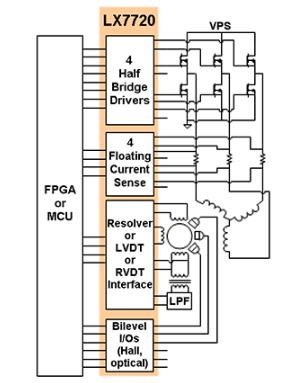
圖 3:使用 LX7720 的電機(jī)控制系統(tǒng)框圖。
工藝開發(fā)和表征
運(yùn)動(dòng)控制電子元件可分為三個(gè)特定的IC工藝要求。由于航天器中的電機(jī)可以在高達(dá)150V的電壓軌下工作,因此需要能夠承受這些更高電壓的過程。
? 由于MOSFET驅(qū)動(dòng)器通常需要高電流,因此DMOS工藝是最有效的。
? 對(duì)于Σ-Δ調(diào)制器的信號(hào)處理和邏輯,需要具有更高密度和更大帶寬的更低電壓過程。
? 對(duì)于數(shù)字配套IC,需要非常小的幾何CMOS工藝。
采用非專門設(shè)計(jì)用于輻射暴露的商業(yè)工藝的工藝需要開發(fā)特殊的工藝設(shè)計(jì)套件(PDK)模型,該模型將輻射暴露的影響考慮在內(nèi)。這涉及將設(shè)備暴露在輻射中并對(duì)其行為進(jìn)行建模。當(dāng)電路設(shè)計(jì)人員使用這些PDK模型設(shè)計(jì)電路時(shí),會(huì)考慮預(yù)期的輻射效應(yīng),并有助于使最終的電路拓?fù)渫ㄟ^設(shè)計(jì)進(jìn)行輻射強(qiáng)化。
函數(shù)分區(qū)和包設(shè)計(jì)
在該系統(tǒng)中的三個(gè)不同IC之間劃分的功能的一個(gè)示例是浮動(dòng)電流檢測(cè)。浮動(dòng)電流檢測(cè)利用高壓 IC 的寬動(dòng)態(tài)范圍與電流檢測(cè)電阻接口。在高壓過程中實(shí)現(xiàn)了一個(gè)初始增益級(jí),該級(jí)將其輸出饋送到在5V過程中實(shí)現(xiàn)的儀表放大器。5V IC與數(shù)字IC共享相同的信號(hào)地。一旦電平從浮動(dòng)高壓轉(zhuǎn)換到以地為參考的信號(hào)地,就會(huì)使用BiCMOS工藝中實(shí)現(xiàn)的二階Σ-Δ調(diào)制器對(duì)模擬信號(hào)進(jìn)行采樣。由于具有較小幾何形狀的屬性,低壓工藝可以在更小的空間和更高的帶寬下實(shí)現(xiàn)功能。調(diào)制器的輸出是與數(shù)字IC電壓兼容的數(shù)據(jù)流。數(shù)據(jù)流在模擬前端(AFE)和數(shù)字IC之間路由時(shí)僅消耗一個(gè)封裝引腳。參見圖 4。
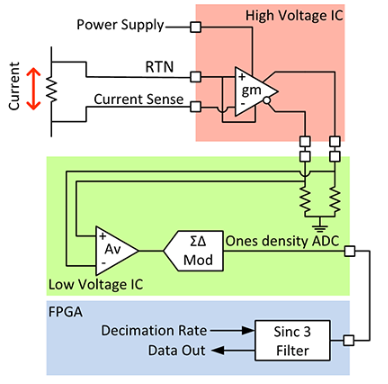
圖 4:浮動(dòng)電流檢測(cè)設(shè)計(jì)。
在數(shù)字IC中,專用IP模塊執(zhí)行sinc3濾波器和抽取功能,其速度可以在AFE 5V工藝中無法支持的速度完成。從檢測(cè)電阻到數(shù)字控制環(huán)路的這條流水線充分利用了它所通過的每個(gè)IC的獨(dú)特功能。高壓和低壓模擬硅芯片可以共同封裝為一個(gè)器件,從引腳輸出來看,LX7720是一個(gè)單一的IC。這種芯片的聯(lián)合封裝利用了每種工藝的優(yōu)勢(shì)。
數(shù)字IP模塊開發(fā)
使用耐輻射FPGA或MCU以及多功能混合信號(hào)IC作為其配套芯片是我們整體系統(tǒng)解決方案方法的精髓。電機(jī)控制功能的數(shù)字信號(hào)處理可以劃分為功能塊,以提供最大程度的IP重用。可以根據(jù)所需的控制算法類型向應(yīng)用程序添加或刪除函數(shù)。可以通過設(shè)置變量來自定義單個(gè)塊。參見圖 5。控制性能權(quán)衡的變量的一個(gè)示例是 sinc3 濾波器 IP 模塊中的抽取率設(shè)置。具有較高過采樣率的信號(hào)將具有更高的分辨率,但代價(jià)是延遲更長(zhǎng)。CAD設(shè)計(jì)工具,如Microchip的Libero? SoC,允許對(duì)塊進(jìn)行配置和定制。
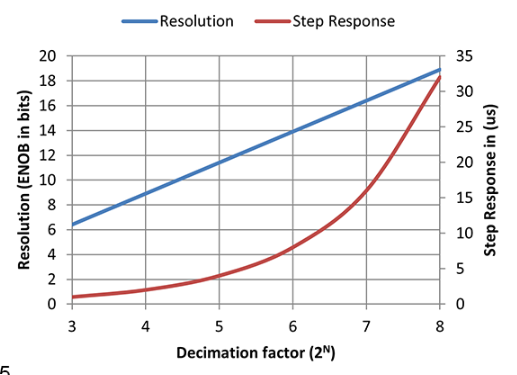
圖 5:延遲和分辨率的抽取權(quán)衡
用于 IP 模塊開發(fā)的設(shè)計(jì)流程元素:
? 確定模塊輸入和輸出
? 指定系統(tǒng)要求
? 開發(fā)系統(tǒng)數(shù)學(xué)模型
? 生成高密度脂蛋白代碼
? 創(chuàng)建分層塊
? 在頂級(jí)進(jìn)行模擬
? 使用硬件進(jìn)行測(cè)試
輻射測(cè)試
LX7720的耐輻射性可以通過以約100 rad/sec的速度測(cè)試TID至50 krad總電離劑量,使用50.0 rads/sec的增強(qiáng)低劑量率測(cè)試ELDRS至0035 krad,以及使用1 x 108 ppm/cm的通量和約85 MeV/mg-cm2的線性能量傳遞的(SEE)單事件效應(yīng)來證明。單事件閂鎖 (SEL) 是在將電源軌調(diào)整到其最大電壓水平的情況下測(cè)量的。單事件瞬變 (SET) 測(cè)試可監(jiān)控電源軌輸入電流和穩(wěn)壓輸出電壓。我們還監(jiān)控傳感器調(diào)制輸出和驅(qū)動(dòng)器輸出是否存在毛刺和偏移。在卸下電源軌的情況下測(cè)試SET的冷備漏洞。對(duì)于單事件翻轉(zhuǎn)(SEU),我們運(yùn)行掃描鏈測(cè)試?yán)蹋h(huán)監(jiān)控鎖存數(shù)據(jù)的完整性。單事件功能中斷 (SEFI) 可能發(fā)生在上電復(fù)位或 UVLO 線路上,這可能會(huì)啟動(dòng)錯(cuò)誤的復(fù)位。
審核編輯:郭婷
-
控制系統(tǒng)
+關(guān)注
關(guān)注
41文章
6550瀏覽量
110498 -
soc
+關(guān)注
關(guān)注
38文章
4124瀏覽量
217966 -
BLDC
+關(guān)注
關(guān)注
205文章
795瀏覽量
96749
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
怎么設(shè)計(jì)懸掛運(yùn)動(dòng)控制系統(tǒng)?
什么是運(yùn)動(dòng)控制系統(tǒng)
專用控制芯片的步進(jìn)電機(jī)運(yùn)動(dòng)控制系統(tǒng)的設(shè)計(jì)理念是什么
運(yùn)動(dòng)控制系統(tǒng)的基本方程
什么是運(yùn)動(dòng)控制系統(tǒng)?運(yùn)動(dòng)控制系統(tǒng)的任務(wù)是什么?
基于專用控制芯片的步進(jìn)電機(jī)運(yùn)動(dòng)控制系統(tǒng)設(shè)計(jì)

運(yùn)動(dòng)控制系統(tǒng)課件
基于SOPC技術(shù)的激光直寫運(yùn)動(dòng)控制系統(tǒng)
DSP的運(yùn)動(dòng)控制系統(tǒng)設(shè)計(jì)
運(yùn)動(dòng)控制系統(tǒng)的定義與機(jī)電系統(tǒng)運(yùn)動(dòng)控制教程分享

運(yùn)動(dòng)控制系統(tǒng)是什么
運(yùn)動(dòng)控制系統(tǒng)的核心應(yīng)用

運(yùn)動(dòng)控制系統(tǒng)是什么?什么是運(yùn)動(dòng)控制系統(tǒng)?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論