") 聊聊關(guān)于PWM調(diào)控模式
聊聊關(guān)于PWM調(diào)控模式
PWM的全稱是脈沖寬度調(diào)制(Pulse-width modulation),是通過將有效的電信號分散成離散形式從而來降低電信號所傳遞的平均功率的一種方式;
PWM一種模擬控制方式,根據(jù)相應(yīng)載荷的變化來調(diào)制晶體管柵極或基極的偏置,來實(shí)現(xiàn)開關(guān)穩(wěn)壓電源輸出晶體管或晶體管導(dǎo)通時間的改變,這種方式能使電源的輸出電壓在工作條件變化時保持恒定。脈沖寬度調(diào)制(PWM )是一種對模擬信號電平進(jìn)行數(shù)字編碼的方法。
通過高分辨率計(jì)數(shù)器的使用,方波的占空比被調(diào)制用來對一個具體模擬信號的電平進(jìn)行編碼。PWM信號仍然是數(shù)字的,因?yàn)樵诮o定的任何時刻,滿幅值的直流供電要么完全有(ON),要么完全無(OFF)。電壓或電流源是以一種通(ON)或斷(OFF)的重復(fù)脈沖序列被加到模擬負(fù)載上去的。
通的時候即是直流供電被加到負(fù)載上的時候,斷的時候即是供電被斷開的時候。只要帶寬足夠,任何模擬值都可以使用PWM進(jìn)行編碼。
采樣控制理論中有一個重要結(jié)論:沖量相等而形狀不同的窄脈沖加在具有慣性的環(huán)節(jié)上時,其效果基本相同.PWM控制技術(shù)就是以該結(jié)論為理論基礎(chǔ),對半導(dǎo)體開關(guān)器件的導(dǎo)通和關(guān)斷進(jìn)行控制,使輸出端得到一系列幅值相等而寬度不相等的脈沖,用這些脈沖來代替正弦波或其他所需要的波形。所以根據(jù)面積等效法則,可以通過對改變脈沖的時間寬度,來等效的獲得所需要合成的相應(yīng)幅值和頻率的波形.
按一定的規(guī)則對各脈沖的寬度進(jìn)行調(diào)制,既可改變逆變電路輸出電壓的大小,也可改變輸出頻率。PWM控制的基本原理很早就已經(jīng)提出,但是受電力電子器件發(fā)展水平的制約,在上世紀(jì)80年代以前一直未能實(shí)現(xiàn)。直到進(jìn)入上世紀(jì)80年代,隨著全控型電力電子器件的出現(xiàn)和迅速發(fā)展,PWM控制技術(shù)才真正得到應(yīng)用。
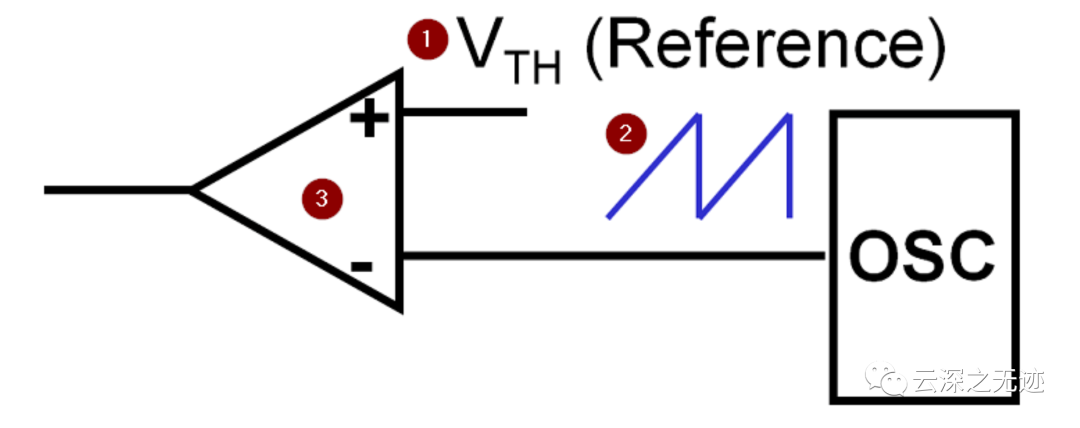
PWM實(shí)現(xiàn)的原理是通過鋸齒波/三角波(載波)所需要合成的波形(調(diào)制波)進(jìn)行比較,然后確定PWM所需要輸出的極性,通常是ON或者是OFF,因?yàn)橐话愣际亲饔玫介_關(guān)元器件上;如下圖所示;

用Siumlink模擬一下
振蕩器輸出的鋸齒波和參考值 進(jìn)行比較,然后就可以輸出PWM波形了;

50%的占空比
1.鋸齒波(圖中橙色波形)最大為10,然后我希望輸出平均為5的波形(圖1中紅色的水平直線);
2.那么通過比較,當(dāng)鋸齒波小于5時;PWM輸出低電平,即為OFF;
3.當(dāng)鋸齒波大于5時,PWM輸出高電平,即為ON;
參考STM32中PWM的配置,根據(jù)載波波形的形狀,假設(shè)三角波最大值是10,那么它的變化過程可能存在以下兩種情況:
1.完整周期包括兩個過程,先遞增,再遞減:增加增加減少減少,這種也叫中央對齊PWM;
2.完整周期只有遞增過程:增加增加;
脈沖波的中心將會被固定在時間窗格的中心,同時脈沖波的兩邊可以移動,使得波的寬度被延伸或壓縮,具體如下圖所示;
中央對齊的PWM模式

這個是另外一種的輸出
電流控制PWM的基本思想是把希望輸出的電流波形作為指令信號,把實(shí)際的電流波形作為反饋信號,通過兩者瞬時值的比較來決定各開關(guān)器件的通斷,使實(shí)際輸出隨指令信號的改變而改變。
空間電壓矢量控制PWM(SVPWM)也叫磁通正弦PWM法。它以三相波形整體生成效果為前提,以逼近電機(jī)氣隙的理想圓形旋轉(zhuǎn)磁場軌跡為目的,用逆變器不同的開關(guān)模式所產(chǎn)生的實(shí)際磁通去逼近基準(zhǔn)圓磁通,由它們的比較結(jié)果決定逆變器的開關(guān)形成PWM波形。此法從電動機(jī)的角度出發(fā),把逆變器和電機(jī)看作一個整體,以內(nèi)切多邊形逼近圓的方式進(jìn)行控制使電機(jī)獲得幅值恒定的圓形磁場(正弦磁通)。具體方法又分為磁通開環(huán)式和磁通閉環(huán)式磁通開環(huán)法用兩個非零矢量和一個零矢量合成一個等效的電壓矢量,若采樣時間足夠小可合成任意電壓矢量。
矢量控制也稱磁場定向控制,其原理是將異步電動機(jī)在三相坐標(biāo)系下的定子電流la,Ib及Ic,通過三相/二相變換,等效成兩相靜止坐標(biāo)系下的交流電流la1及Ib1,再通過按轉(zhuǎn)子磁場定向旋轉(zhuǎn)變換,等效成同步旋轉(zhuǎn)坐標(biāo)系下的直流電流Im1及It1(Im1相當(dāng)于直流電動機(jī)的勵磁電流;It1相當(dāng)于與轉(zhuǎn)矩成正比的電樞電流),然后模仿對直流電動機(jī)的控制方法,實(shí)現(xiàn)對交流電動機(jī)的控制其實(shí)質(zhì)是將交流電動機(jī)等效為直流電動機(jī)分別對速度磁場兩個分量進(jìn)行獨(dú)立控制通過控制轉(zhuǎn)子磁鏈,然后分解定子電流而獲得轉(zhuǎn)矩和磁場兩個分量,經(jīng)坐標(biāo)變換,實(shí)現(xiàn)正交或解耦控制。但是,由于轉(zhuǎn)子磁鏈難以準(zhǔn)確觀測,以及矢量變換的復(fù)雜性,使得實(shí)際控制效果往往難以達(dá)到理論分析的效果,這是矢量控制技術(shù)在實(shí)踐上的不足,此外。它必須直接或間接地得到轉(zhuǎn)子磁鏈在空間上的位置才能實(shí)現(xiàn)定子電流解耦控制,在這種矢量控制系統(tǒng)中需要配置轉(zhuǎn)子位置或速度傳感器。這也就是為什么有那么多傳感器知道位置的原因。
https://blog.csdn.net/ic2121/article/details/119883174
原文鏈接:https://blog.csdn.net/ic2121/article/details/119883174
-
PWM
+關(guān)注
關(guān)注
114文章
5142瀏覽量
213398 -
脈沖
+關(guān)注
關(guān)注
20文章
884瀏覽量
95538 -
電信號
+關(guān)注
關(guān)注
1文章
790瀏覽量
20536
發(fā)布評論請先 登錄
相關(guān)推薦
關(guān)于stm的輸入捕獲模式測量 pwm的應(yīng)用
請問STC15W408AS怎么設(shè)置用PWM來調(diào)控電壓
怎樣完成PWM輸入模式采集頻率和占空比
PWM模式1與PWM模式2區(qū)別
采用51單片機(jī)和LCD1602實(shí)現(xiàn)車載空調(diào)控制器的設(shè)計(jì)資料分享
STM8的PWM輸出模式中PWM1和PWM2的區(qū)別是什么
淺析PWM調(diào)控模式
溫度傳感器PWM模式下去耦如何進(jìn)行
聊聊關(guān)于架構(gòu)的話題
單極性PWM模式與雙極性PWM模式到底是什么
基于單片機(jī)的車載空調(diào)控制器

關(guān)于對STM32的PWM和DAC的學(xué)習(xí)和練習(xí)
聊聊一個關(guān)于TIMER事件觸發(fā)中斷的響應(yīng)話題






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論