 功能塊MCA_CamInDirect的電子凸輪功能(2)
功能塊MCA_CamInDirect的電子凸輪功能(2)
1_回顧及簡介
上節介紹了測試CamInDirect的程序和添加的VISU,并測試了當主從軸均為Relative時的CAM運動。
本節內容介紹
當主從軸設置為AR時,CamIn時主軸當前值為30時,從軸的動作。
當主從軸設置為AA時,CamIn時主軸當前值是30時,從軸的動作。
主從軸設置為AA時,當不設置Offset時的CAM運行,以及設置MasterOffset時的CAM運行。
2_具體操作介紹
1.設置CamTableSelect的基本參數
主從軸分別設置為Absolute和 Relative。CAM曲線的線型設置為MCA_Poly5。
2.AR時的測試
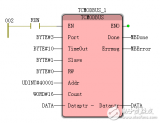
起始時,主軸當前值設置為30,由MCA_CamGetInterpolationPosition可實時讀出,當主軸當前值為30時,對應的CAM曲線上從軸的當前值應當為:12.42
從軸當前值為0時,執行CamInDirect,從軸馬上啟動運行到12.42.即在當前值0上向前運行12.42.
從軸當前值為50時,執行CamInDirect,從軸馬上啟動運行到62.42.即在當前值50上向前運行12.42.
因從軸是Relative,主軸當前值是30,與30對應的從軸位置是Relative的12.42.所以執行CamInDirect時,從軸會馬上向前運行12.42.
3.AA時的測試
主從軸均設置為Absolute。
起始時,主軸當前值設置為30,由MCA_CamGetInterpolationPosition可實時讀出,當主軸當前值為30時,對應的CAM曲線上從軸的當前值:12.42
從軸當前值為50時,執行CamInDirect,從軸馬上啟動運行到12.42.
從軸當前值為0時,執行CamInDirect,從軸馬上啟動運行到12.42.
從軸當前值為80時,執行CamInDirect,從軸馬上啟動運行到12.42.
因從軸設置為Absolute,因此與主軸30對應的從軸的絕對位置是:12.42.
4.AA_Cam運行測試
主從軸當前值為(0,0),不設置Offset,當執行了CamInDirect后,馬上進入InSync狀態。主軸啟動時,從軸立即耦合啟動。
條件同上,但把MasterOffset設置為30. 執行CamInDirect后,主軸先啟動運行到30,而后InSync信號變為TRUE,從軸開始耦合啟動。
針對以上運動,結合Trace曲線進行了分析。
-
工業控制
+關注
關注
37文章
1443瀏覽量
85787 -
功能塊
+關注
關注
0文章
18瀏覽量
6079
發布評論請先 登錄
相關推薦
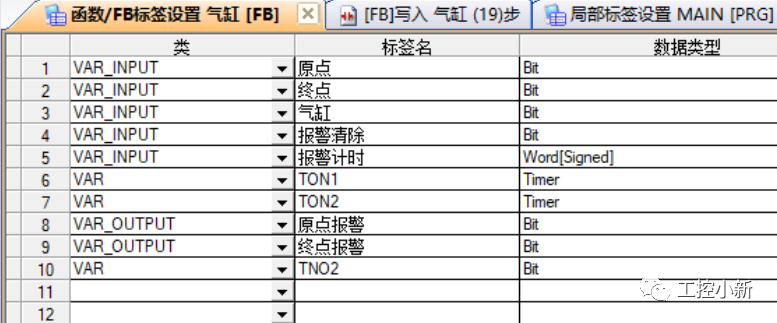
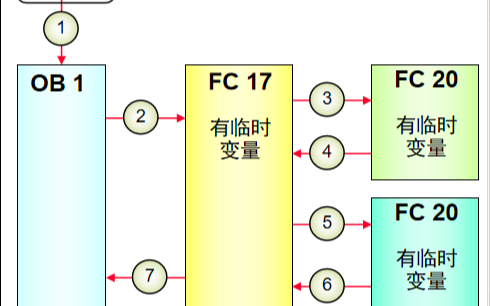
什么是FB功能塊?為什么要使用FB功能塊?如何制作一個FB功能塊?
基于EPA的PID功能塊的設計及實現
騰控MODBUS主站功能塊通迅詳解





 工商網監
工商網監
評論