 首發即量產的25kg大負載協作機器人有何能耐?
首發即量產的25kg大負載協作機器人有何能耐?
近年來,為滿足更豐富的應用場景需求,在各家協作機器人優秀企業的創新下,協作機器人各項性能指標一再獲得突破,其中包括負載,這一次,艾利特機器人不僅把協作機器人的負載提升至25kg,其長臂展、高速度、高精度、高柔性、高安全性等功能則可以完美適配產業發展對協作機器人的要求。
大負載與長臂展
近期,艾利特的CS系列機器人產品,在已經批量出貨的3kg、6kg、12kg負載機型基礎上,重磅推出兩款負載分別是20kg和25kg,工作半徑分別是1800mm和1500mm的機型CS620、CS625,兩款新品負載能力更強、工作半徑更大,被譽為CS系列里的“大力選手”。
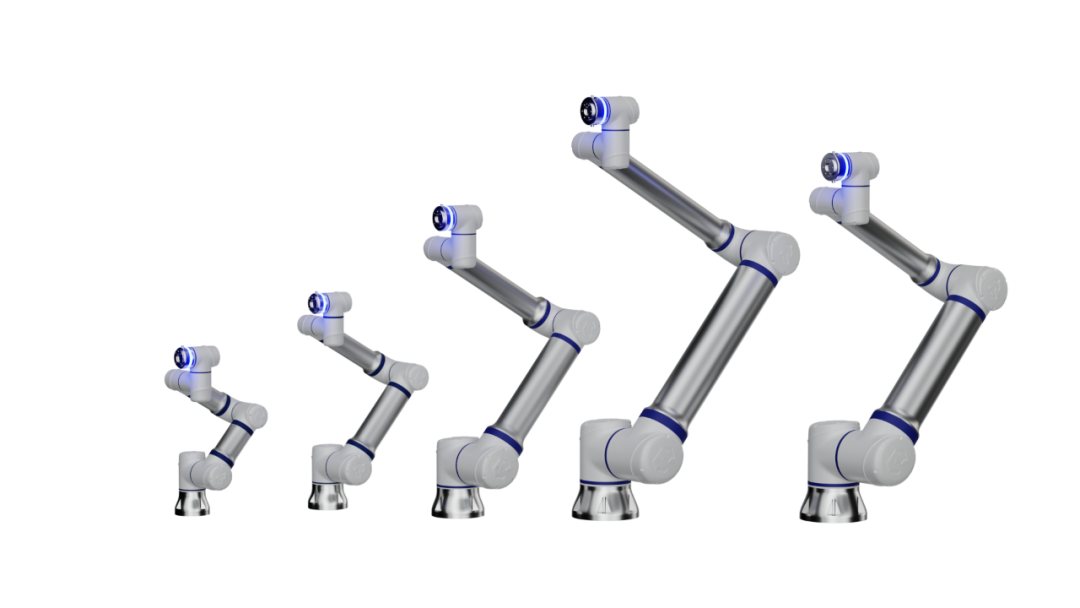
值得注意的是,CS625自重僅60kg,比國外同類產品輕25%,負載自重比超過40%,且支持各種安裝角度。
艾利特機器人項目經理在接受高工機器人調研時表示,艾利特一直十分關注協作機器人的負載自重比,在研究了眾多國內外同行的產品后,艾利特對大負載機型進行了創新性設計和開發。
除了自重、負載兩大行業關注的參數外,“臂展”也成為了實際應用中的關鍵指標。
CS620、CS625的大臂展可有效地拓展協作機器人的物流應用場景,適配更多托盤規格和垛高要求,滿足多種碼垛需求,更好地融入物流各個環節;可以適配更大型的機床、降低安裝部署難度;CS620 1800mm的工作半徑超過一般專用弧焊工業機器人,不依靠外部軸即可實現中大型零件的焊接。
“以往,協作機器人的市場競爭主要聚焦于標準化產品,更關注應用環境的普適性,往往忽略了應用場景的多元個性化,導致一些應用場景缺乏更有針對性的產品,因此用戶往往選擇‘退而求其次’。而現在艾利特需要提供更加優質的,且面向更多個性化應用的服務,因此會以客戶實際應用需求為導向來設計協作機器人,進而拓寬協作機器人這一品類的應用范圍,同時,也能推動行業對協作機器人的認可度。”艾利特產品經理表示,而這也正是艾利特推出更大的負載能力和工作半徑(25kg,1800mm)協作機器人的初衷。
高速度與高安全性
機器人的速度提升,安全性必然降低,就需要安裝額外的傳感器。對于傳統工業機器人而言,即使其運行速度較低,但是它的自重仍然很重,因而運行中產生的動量和能量大,安全性也受到很大影響。
而協作機器人固有的安全性優勢仍然明顯,例如,在有人的情況下,協作機器人得益于重量輕、有碰撞檢測的功能等,甚至可以比同等狀況下的傳統工業機器人速度更大。加之協作機器人自重足夠輕,能夠滿足客戶現場應用對安全性和工作效率所提出的要求。
在速度方面,艾利特官方數據顯示,CS620最大TCP速度3.9m/s,CS625最大TCP速度3.3m/s;CS620、CS625所有關節轉速均達到世界最快,配合全新的運動控制算法,運行速度比國外同類產品提高5%,比國內同類產品提高35%以上。
CS620、CS625具備高靈敏度的碰撞檢測功能,在大臂展、大負載的情況下,末端定位精度更高、運行更平穩、更智能,完美適配協作機器人多樣化的應用場景。
作為CS系列的一員,CS620、CS625繼承了CS系列優秀的平臺優勢,取得了EN ISO 13849-1:2015(PL=d, CAT 3)、ISO 10218-1:2011、EN 60204-1:2018和EN ISO 12100:2010等多個認證,具有27項安全功能和大量可配置雙通道安全I/O信號接口,并取得CR、CE、UL、RoHS、Semi-2、智能等級等主要國家和地區準入、應用環境準入證書。本體潔凈室等級為ISO Class5,適用于潔凈室環境。
此外,CS620、CS625通過重新設計架構,優化100余處機械和硬件設計,兩款產品更是進行了嚴格的的測試,整機測試模擬運行合計超過100,000小時。
工具端5A負載電流
目前,一般協作機器人工具I/O對外供電電流通常小于2A,CS系列中小負載機型達到3A。艾利特再接再厲、全新設計工具I/O硬件,CS620、CS625的工具I/O對外供電達到5A、120W,滿足大功率、高負載末端工具的供電需求,賦能強大生態衍生能力。
這一升級,恰恰體現的是艾利特貼近客戶,在產品定義、場景設計時就將客戶需求考慮進去了。
協作機器人的負載越大,意味著可以攜帶越大的末端工具,工件變大、機器人變大、末端工具也會變大,因此對末端工具的供電也需要變大。
艾利特CS系列在初期設計時和其他機型一樣都是3A負載電流,但是經過大量的調研分析發現,電動夾爪/吸盤抓取20KG的物件通常需要4.5-5A的電流。以OnRobot VGP20電動吸盤為例,其自重2.5kg,要吸取負載20kg及以上的物品,需要4.5A電流。因此,艾利特在研發設計過程中也對負載電流做了調整,從3A提升至5A,從而給更大負載的末端工具充足的電流。
另一方面,協作機器人的中空關節涉及到內部走線,旨在提高安全性,增加關節自由旋轉的范圍,而外接的電路、氣管、氣源等都會對設計產生副作用,過往的實際應用情況是,本來協作機器人采取內部走線的形式,而實際應用中受限于機器人自身的供電能力,所以仍需外部接線,而工具端負載電流提升至5A后則完美解決了這一問題。
爭做領跑者
高工機器人調研發現,CS620、CS625從立項到落地再到量產,前后花費的時間大概為一年半。從2022年底開始投料試產,至2023年2月順利合格的產出,標志著CS620、CS625正式進入量產階段。
而這依托的是艾利特強大的研發團隊,按照既定的規劃節點完成對應的研發生產任務,在生產過程中,艾利特展開了大量測試工作,以保證量產順利進行。
“這是一場技術及時間的競賽,隨著行業的發展,相信會有更多協作機器人企業推出25KG級產品。艾利特希望可以一直走在行業前列。”艾利特項目經理表示。
CS620、CS625新品,是艾利特敏銳關注市場動態、深度調研應用場景,及時響應客戶需求的產品。
當前,CS620、CS625已被應用于搬運碼垛、機床上下料、物流、高精度弧焊等場景,與CS系列其他機型一樣,兩款新品也支持側裝、吊裝,還可以安裝在AGV/AMR上組成重載復合機器人,實現物流裝車、卸車自動化。
可以說,大負載協作機器人的應用市場才剛剛起步,應用潛力具有豐富的想象力。隨著更多新產品的推出,更多行業優秀企業的加入,以及終端客戶對產品的熟悉程度和認知程度的提升,會讓大負載協作機器人逐步進入更多領域實現應用。
此外,今年1月,工信部等17部門印發“機器人+”應用行動實施方案,未來機器人的應用場景將不局限于工業生產、消費零售等,而是滲透進國民經濟當中。
因此,艾利特機器人將持續提高產品的綜合性價比,以滿足工業行業客戶對協作機器人的精度、速度、負載、臂展、穩定性、可靠性、噪音等更高的要求,同時針對新領域、新應用,艾利特也會開發出更多新機型。
審核編輯 :李倩
-
傳感器
+關注
關注
2548文章
50698瀏覽量
752037 -
電流
+關注
關注
40文章
6757瀏覽量
131879 -
協作機器人
+關注
關注
2文章
483瀏覽量
30099
原文標題:首發即量產的25kg大負載協作機器人有何能耐?
文章出處:【微信號:gaogongrobot,微信公眾號:高工機器人】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
歐姆龍協作機器人TM25S可使用多種方法進行編程

歐姆龍發布TM S系列協作機器人新產品

優傲機器人升級高負載協作機器人,助力客戶生產效率飛躍
協作機器人拽拖示教詳解
醫療機器人有哪些基本組成_醫療機器人有哪些功能
泰科機器人攜新款行星滾柱絲杠線性關節模組和雙臂協作機器人亮相2024年ITES深圳工業展

展示焊接、碼垛、CNC,大族協作機器人亮相美國AUTOMATE 2024

PCB行業:用協作機器人,就選大族機器人
?大象機器人首發萬元級水星Mercury人形機器人系列

科聰協作科聰協作(復合)移動機器人整體解決方案

交互的藝術:協作機器人如何定義新一代的人機關系?





 工商網監
工商網監
評論