") 在精密運動控制應(yīng)用中最大限度地減少步進電機噪聲和振動
在精密運動控制應(yīng)用中最大限度地減少步進電機噪聲和振動
步進電機在廣泛的應(yīng)用中運行良好,但可能會遇到轉(zhuǎn)矩脈動和電流失真問題。了解 QuietStep,這是 Allegro MicroSystems 的專有算法,作為可能的解決方案。
在許多應(yīng)用中,步進電機比直流 (DC) 和無刷直流 (BLDC) 電機具有獨特的優(yōu)勢。雙極步進器提供精確的開環(huán)位置以及零速扭矩,無需使用控制回路或外部傳感器。憑借其受控步進功能,步進電機適用于各種精密運動控制應(yīng)用,包括閉路電視 (CCTV)、3D 打印機、計算機數(shù)控 (CNC)、紡織制造設(shè)備和拾取和放置機器。
成功部署步進電機需要有效管理噪音和振動。例如,在閉路電視應(yīng)用中,振動直接轉(zhuǎn)化為圖像傳感器和萬向節(jié)。大變焦與移動相結(jié)合會使圖像失真。在3D打印中,由高扭矩脈動引起的電機共振或過沖會導(dǎo)致許多不必要的打印偽影。在大多數(shù)情況下,減少電機振動可以帶來更好的圖像質(zhì)量或更精確的3D打印。減少電機振動還可以實現(xiàn)更安靜的整體運行。
基于專有算法的先進技術(shù)現(xiàn)在可用于通過減少轉(zhuǎn)矩紋波和電流失真來最大限度地減少步進電機設(shè)計中的噪聲和振動。在深入研究這些運動控制解決方案之前,了解導(dǎo)致振動和可聽噪聲的原因很有幫助。首先,讓我們仔細看看步進電機是如何工作的。
步進機基礎(chǔ)知識
雙極步進電機是一種具有離散極位置的直流電機,由多線圈組成,分為兩組,稱為相位。兩相之間的電流比決定了轉(zhuǎn)子在兩個繞組之間的位置。通過這種方式,步進電機可以在兩極之間將其位置劃分為較小的增量,稱為微步。
每個步進電機繞組中的電流可以相加以創(chuàng)建一個矢量,其中矢量的大小是扭矩。通過檢查極空間中兩個相位中每個相位的電流,我們可以可視化矢量在每個電周期中旋轉(zhuǎn)時。
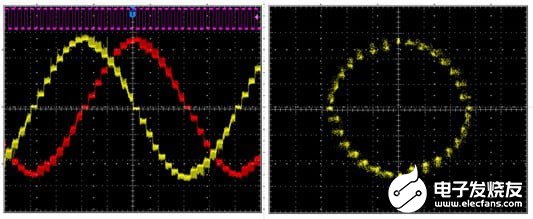
圖1.
雙極步進電機的兩個繞組中的相電流均為 1/8(左)。雙極步進器的兩個繞組中的相電流為1/8步長,但以極性域表示(右)。
在基于時間的域中(圖1左),扭矩定義為兩條曲線下面積的總和。在極性域(圖1右)中,矢量的大小是扭矩。在這些圖像中,我們可以看到,當(dāng)磁場通過每個電周期移動時,扭矩是恒定的。當(dāng)扭矩不恒定時,系統(tǒng)會經(jīng)歷振動和可聽噪聲。
假設(shè)電機未在諧振時運行,轉(zhuǎn)矩脈動將成為步進電機中可聽見噪聲和振動的最大來源。
控制步進電機(電流控制)
脈寬調(diào)制(PWM)電流控制是驅(qū)動步進電機的最常見方式。通過實施電流控制,控制器PWM斬波輸出,限制每個繞組中的電流,以保持定義轉(zhuǎn)子位置的比率。
PWM電流控制的性質(zhì)導(dǎo)致基于施加的占空比,電機電感和兩端電壓的電流紋波。為了將紋波降至最低,控制器可以通過實施各種衰減模式來管理繞組中電流的減小方式。
讓我們回顧一下從驅(qū)動電流斜坡上升開始的單個PWM周期的常見衰減模式。
在驅(qū)動之后(如圖2A所示),衰減模式在PWM關(guān)斷時間內(nèi)通過圖2B和2C所示的兩種同步方法實現(xiàn)。
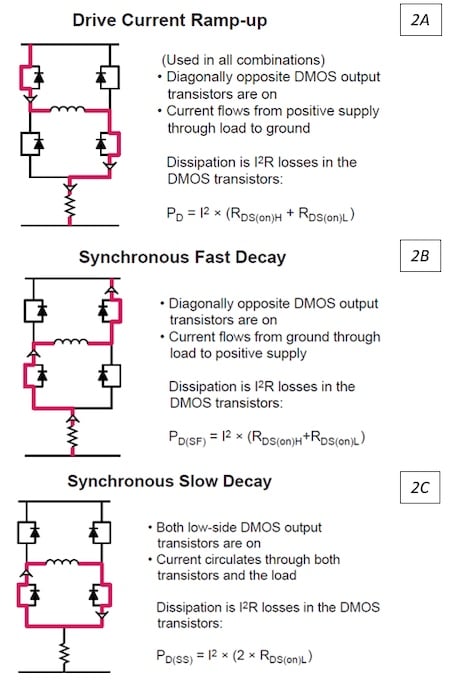
圖2.
全橋電流路徑顯示驅(qū)動和衰減模式。
快速衰減可提供最佳的電流控制,但會導(dǎo)致高紋波。緩慢衰減會產(chǎn)生低紋波,但衰減速率受電機反電動勢 (BEMF) 的影響,在某些情況下,這會導(dǎo)致電流失真。
圖3A顯示了使用100%慢衰減時會發(fā)生什么。當(dāng)繞組電流下降時,緩慢衰減不能足夠快地降低電流,從而導(dǎo)致下降沿失真。圖3B顯示了使用100%快速衰減的效果。紋波電流要大得多,但控制器可以保持對電流的精確控制。
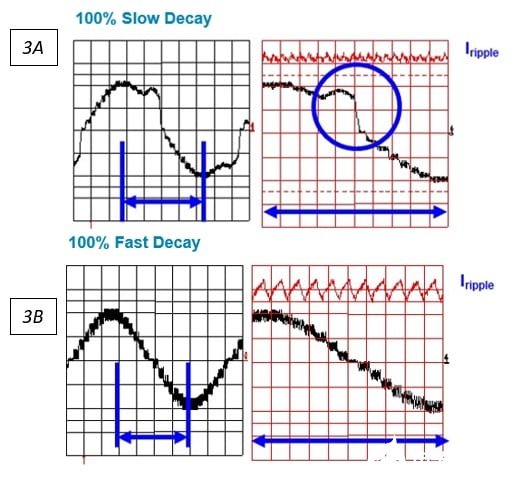
圖 3A.
當(dāng)負載電流減小時,緩慢衰減會產(chǎn)生失真。
圖 3B.
快速衰減會導(dǎo)致較大的紋波電流,從而導(dǎo)致振動和可聞噪聲。
我們可以避免圖1所示的影響,并通過達成折衷方案來保持合理的紋波電流。當(dāng)負載中的電流減小時,驅(qū)動器實現(xiàn)快速衰減和慢速衰減的組合,稱為混合衰減。關(guān)斷時間分為一部分快速衰減和一部分慢衰減,如圖4所示。當(dāng)負載中的電流增加時,緩慢衰減可將紋波降至最低。
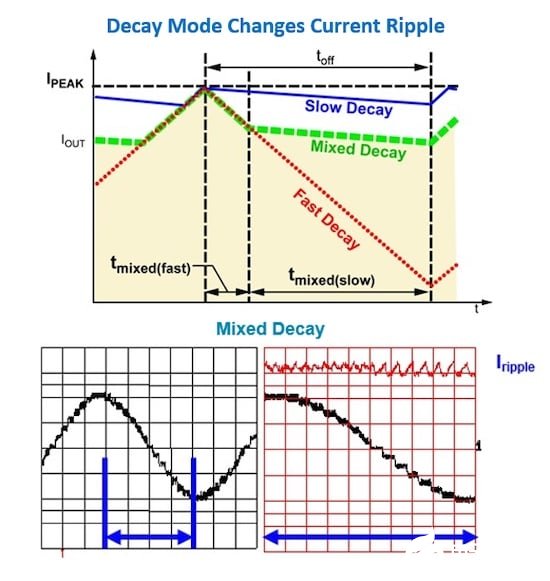
圖4.
混合衰減可最大限度地減少紋波,同時保持對繞組中電流的控制。
根據(jù)步進電機的特性及其LR時間常數(shù),上升沿的緩慢衰減可能會在低電流下產(chǎn)生問題,其中電流變化率太快,PWM控制器由于電流檢測放大器消隱而無法調(diào)節(jié)到低電流。當(dāng)負載中的電流增加時,這種情況會導(dǎo)致電流失真,如圖5所示。
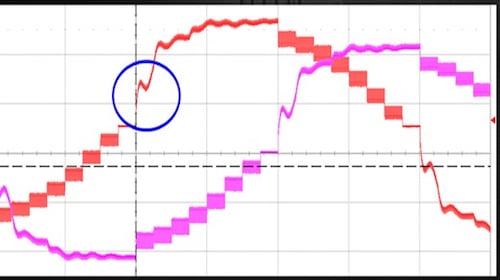
圖5.
上升沿的緩慢衰減會導(dǎo)致具有某些LR特性的電機失真。
很難實現(xiàn)適用于所有雙極步進電機的簡單折衷方案。為了解決這些問題,同時保持盡可能低的紋波,系統(tǒng)必須適應(yīng)不同的電機特性。
降低轉(zhuǎn)矩脈動的新方法
Allegro 推出了一種減少步進電機應(yīng)用的轉(zhuǎn)矩紋波和電流失真的方法。這項名為 QuietStep 的創(chuàng)新現(xiàn)在可作為 Allegro 最新 A5984 步進電機驅(qū)動器的選裝件提供。
QuietStep技術(shù)使用專有算法,該算法可以逐周期動態(tài)調(diào)整(向上或向下)所需的快速衰減百分比,以便在所有操作條件下實現(xiàn)最佳性能,而無需使用復(fù)雜的軟件。
該算法通過首先實現(xiàn)慢衰減,然后實現(xiàn)快速衰減來扭轉(zhuǎn)混合衰減的傳統(tǒng)方法。圖6A顯示了傳統(tǒng)的混合衰減,其中固定部分為快速衰減和慢速衰減,快速衰減啟動PWM關(guān)斷時間周期。圖6B顯示了在PWM關(guān)斷時間周期開始時使用QuietStep時緩慢衰減的開始情況。QuietStep自動調(diào)整快速衰減和慢速衰減的比率,以最小化電流紋波,同時保持精確的電流調(diào)節(jié)。
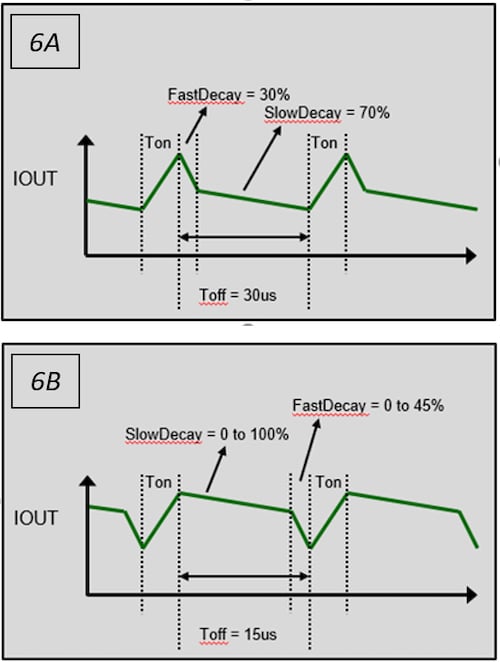
圖 6A.
傳統(tǒng)的混合衰變,其中快速和慢速衰減的比例是固定的。
圖 6B.
QuietStep可以動態(tài)調(diào)整快衰減和慢衰減的比例,以保持電流控制并最小化電流紋波。
僅在需要電流調(diào)節(jié)時才引入快速衰減,從而產(chǎn)生盡可能低的紋波電流。圖7顯示了隨著電流減小的固定混合衰減和電流隨著電流的增加而緩慢衰減而導(dǎo)致的電流控制喪失產(chǎn)生的高紋波電流。與混合衰減相比,QuietStep技術(shù)通過將紋波電流降低一半來消除這些影響。當(dāng)電流增加時,QuietStep 將電流調(diào)節(jié)保持在零安培。
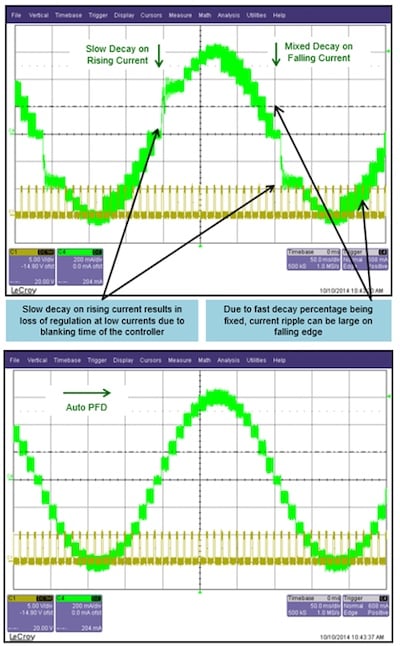
圖7.
傳統(tǒng)的電流增加時的緩慢衰減和電流減小的混合衰減導(dǎo)致電流增加時失去調(diào)節(jié),隨著電流的減小而產(chǎn)生較大的紋波。QuietStep 在電流增加時提供出色的電流調(diào)節(jié),同時在整個電氣周期內(nèi)保持低紋波電流。
降低系統(tǒng)級電流紋波和諧振可最大限度地減少振動以及振動引起的可聽噪聲。結(jié)果是在閉路電視系統(tǒng)中實現(xiàn)更好的視頻成像,在3D打印機中實現(xiàn)卓越的打印質(zhì)量。
減少可聽噪聲和振動幾乎增強了所有電機控制應(yīng)用,從家庭自動化門鎖和閥門控制到精密視覺系統(tǒng)和 3D 打印。Allegro 的 QuietStep 技術(shù)消除了嘗試確定系統(tǒng)中噪聲和振動源的麻煩。QuietStep完全集成到IC中,易于實現(xiàn),無需編程或外部組件,并且是全自動的。
部署帶雙極步進電機驅(qū)動器的 QuietStep
借助支持這種先進技術(shù)的微步電機驅(qū)動器(如 Allegro A5984),電流波形可在各種步進電機速度和特性范圍內(nèi)自動優(yōu)化。步進電機驅(qū)動器解決方案配備QuietStep技術(shù),可在PWM周期內(nèi)動態(tài)調(diào)整快速衰減量,以最大程度地減少各種工作條件下的電流紋波。
QuietStep 功能可提高系統(tǒng)性能,從而降低電機噪音、降低振動并提高步進精度。利用這項技術(shù),A5984 驅(qū)動器設(shè)計用于在全步進至 1/32 步進模式下操作雙極步進電機,并可實現(xiàn)高達 40 V 和 ±2 A 的輸出驅(qū)動能力。 總體而言,QuietStep 算法可簡化系統(tǒng)設(shè)計、實施和操作。
-
步進電機
+關(guān)注
關(guān)注
150文章
3095瀏覽量
147347 -
運動控制
+關(guān)注
關(guān)注
4文章
565瀏覽量
32825
發(fā)布評論請先 登錄
相關(guān)推薦
步進電機噪聲與振動的抑制
步進電機使用之噪聲與振動的抑制總結(jié)
數(shù)據(jù)采集系統(tǒng)設(shè)計最大的挑戰(zhàn)是最大限度地減少噪聲影響
在數(shù)字無線通信產(chǎn)品測試中最大限度地降低電源瞬態(tài)電壓
如何最大限度地減少DUT上的電流負載?
反激式拓撲中最大限度降低空載待機功耗的參考設(shè)計
智慧家庭系列文章 | 如何最大限度地減少智能音箱和智能顯示器的輸入功率保護


減少步進電機振動的技巧

如何在C2000設(shè)備中最大限度地利用GPIO





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論