") 一文理解PID算法
一文理解PID算法
01前言
大家好,前面發(fā)了幾篇關(guān)于PID的文章。
02自動(dòng)控制系統(tǒng)
在直流有刷電機(jī)的基礎(chǔ)驅(qū)動(dòng)中,如果電機(jī)負(fù)載不變,我們只要設(shè)置固定的占空比(電壓),電機(jī)的速度就會(huì)穩(wěn)定在目標(biāo)范圍。
然而,在實(shí)際的應(yīng)用中,負(fù)載可能會(huì)發(fā)生變化,此時(shí)如果還是輸出固定的電壓,電機(jī)的速度就偏離目標(biāo)范圍了,為了解決這個(gè)問(wèn)題,我們需要引入自動(dòng)控制系統(tǒng)中的閉環(huán)控制。接下來(lái)我們開(kāi)始學(xué)習(xí)自動(dòng)控制系統(tǒng)的內(nèi)容。
概念:用自動(dòng)控制裝置,對(duì)關(guān)鍵參數(shù)進(jìn)行自動(dòng)控制,使它在受到外界干擾而偏離正常狀態(tài)時(shí),能夠被自動(dòng)地調(diào)節(jié)回到目標(biāo)范圍內(nèi)。
應(yīng)用場(chǎng)景:電水壺保溫系統(tǒng)、大棚溫控系統(tǒng)、水位控制系統(tǒng),等等。
分類:自動(dòng)控制系統(tǒng)分為開(kāi)環(huán)控制系統(tǒng)和閉環(huán)控制系統(tǒng)。
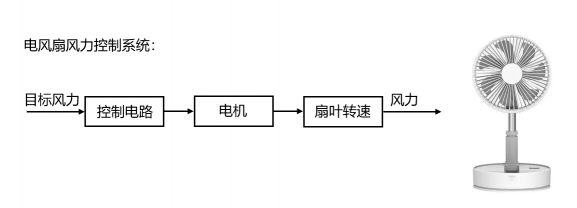
① 開(kāi)環(huán)控制系統(tǒng)
在開(kāi)環(huán)控制系統(tǒng)中,系統(tǒng)輸出只受輸入的控制,沒(méi)有反饋回路,控制精度和抑制干擾的特性都比較差。
電風(fēng)扇風(fēng)力控制系統(tǒng)就是一個(gè)開(kāi)環(huán)控制的系統(tǒng),我們?cè)O(shè)置好目標(biāo)風(fēng)力之后,控制電路就輸出相應(yīng)的電壓(假設(shè)是電壓控制),此時(shí)電機(jī)的扇葉轉(zhuǎn)速就被控制在目標(biāo)范圍了。
理想狀態(tài)下,風(fēng)扇的輸出風(fēng)力確實(shí)可以穩(wěn)定在目標(biāo)值附近,然而,在實(shí)際的使用中,電機(jī)會(huì)逐漸老化,扇葉上的灰塵也會(huì)讓負(fù)載增大,此時(shí)我們所設(shè)定目標(biāo)風(fēng)力和實(shí)際風(fēng)力可能就存在偏差了。
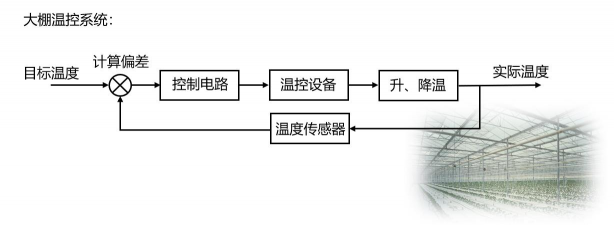
② 閉環(huán)控制系統(tǒng)
在閉環(huán)控制系統(tǒng)中,引入了反饋回路,利用輸出(實(shí)際值)和輸入(目標(biāo)值)的偏差,對(duì)系統(tǒng)進(jìn)行控制,避免偏離預(yù)定目標(biāo)。
大棚溫控系統(tǒng)就是一個(gè)閉環(huán)控制的系統(tǒng),我們?cè)O(shè)置好目標(biāo)溫度之后,溫度傳感器會(huì)采集棚內(nèi)的實(shí)際溫度,然后將目標(biāo)溫度和實(shí)際溫度進(jìn)行偏差的計(jì)算,計(jì)算后的結(jié)果輸入到控制電路中,控制電路進(jìn)一步控制溫控設(shè)備進(jìn)行升溫和降溫,此時(shí)棚內(nèi)的實(shí)際溫度就被控制在目標(biāo)范圍了。
當(dāng)實(shí)際溫度因外部影響偏離目標(biāo)值時(shí),溫度傳感器(反饋電路)就能及時(shí)的反饋偏差,讓系統(tǒng)自動(dòng)調(diào)節(jié)溫控設(shè)備,使得實(shí)際溫度逐漸回到目標(biāo)范圍。
03PID 算法 match ? ?
PID 算法是閉環(huán)控制系統(tǒng)中常用的算法,PID 分別是 Proportion(比例)、Integral(積分)、Differential(微分)的首字母縮寫。它是一種結(jié)合比例、積分和微分三個(gè)環(huán)節(jié)于一體的閉環(huán)控制算法。
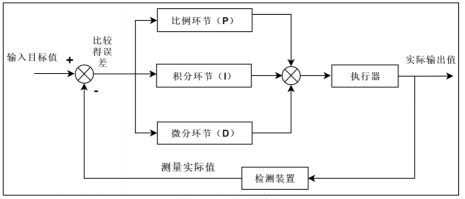
我們將輸入目標(biāo)值和實(shí)際輸出值進(jìn)行偏差的計(jì)算,然后把計(jì)算結(jié)果輸入到 PID控制算法中,經(jīng)過(guò)比例、積分和微分三個(gè)環(huán)節(jié)的運(yùn)算,運(yùn)算后的輸出作用于執(zhí)行器,從而讓系統(tǒng)的實(shí)際值逐漸靠近目標(biāo)值。
以大棚溫控系統(tǒng)為例,來(lái)理解 PID 算法中三個(gè)環(huán)節(jié)的作用。
比例環(huán)節(jié)( Proportion)
比例環(huán)節(jié)可以成比例地反應(yīng)控制系統(tǒng)的偏差信號(hào),即輸出與輸入偏差成正比,可以用來(lái)減小系統(tǒng)的偏差。公式如下:
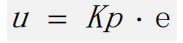
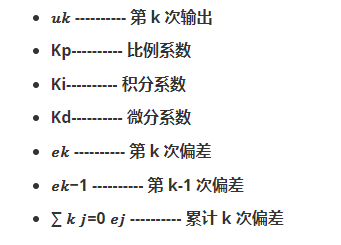
u —輸出
Kp—比例系數(shù)
e —偏差
我們可以通過(guò)大棚溫控去理解PID公式。例如需要調(diào)節(jié)棚內(nèi)溫度為 30℃,而實(shí)際溫度為 10℃,此時(shí)的偏差 e=20,由比例環(huán)節(jié)的公式可知
當(dāng) e 確定時(shí),Kp 越大則輸出u 越大,也就是溫控系統(tǒng)的調(diào)節(jié)力度越大,這樣就可以更快地達(dá)到目標(biāo)溫度;而當(dāng) Kp 確定時(shí),偏差 e 越大則輸出 u 越大。
由此可見(jiàn),在比例環(huán)節(jié)中,比例系數(shù) Kp 和偏差 e 越大則系統(tǒng)消除偏差的時(shí)間越短
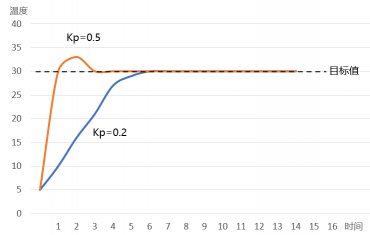
當(dāng) Kp 的值越大時(shí),其對(duì)應(yīng)的橙色曲線達(dá)到目標(biāo)值的時(shí)間就越短,與此同時(shí),橙色曲線出現(xiàn)了一定幅度的超調(diào)和振蕩,這會(huì)使得系統(tǒng)的穩(wěn)定性下降。
所以我們?cè)谠O(shè)置比例系數(shù)的時(shí)候,并不是越大越好,而是要兼顧消除偏差的時(shí)間以及整個(gè)系統(tǒng)的穩(wěn)定性。
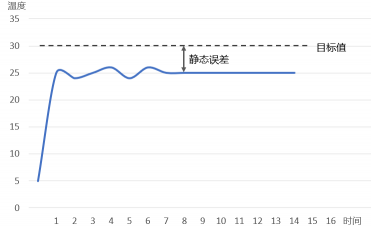
在實(shí)際的應(yīng)用中,如果僅有比例環(huán)節(jié)的控制,可能會(huì)給系統(tǒng)帶來(lái)一個(gè)問(wèn)題:靜態(tài)誤差。
靜態(tài)誤差是指系統(tǒng)控制過(guò)程趨于穩(wěn)定時(shí),目標(biāo)值與實(shí)測(cè)值之間的偏差。
如果我們?cè)谛枰{(diào)節(jié)棚內(nèi)溫度為 30℃,而實(shí)際溫度為 25℃,此時(shí)偏差 e=5,Kp 為固定值,那么此時(shí)的輸出可以讓大棚在半個(gè)小時(shí)之內(nèi)升溫 5℃,而外部的溫差可以讓大棚在半個(gè)小時(shí)之內(nèi)降溫 5℃,也就是說(shuō),輸出 u 的作用剛好被外部影響抵消了,這就使得偏差會(huì)一直存在。
我們可以通過(guò)增大 Kp 來(lái)增大輸出,以此消除偏差。在實(shí)際應(yīng)用中,此方法的局限性很大,因?yàn)槲覀儾荒艽_定偏差的大小,它是在實(shí)時(shí)變化的,如果我們把 Kp 設(shè)置得太大,就會(huì)引入超調(diào)和振蕩,讓整個(gè)系統(tǒng)的穩(wěn)定性變差。因此,為了消除靜態(tài)誤差,我們引入了積分環(huán)節(jié)。
積分環(huán)節(jié)(Integral)
積分環(huán)節(jié)可以對(duì)偏差 e 進(jìn)行積分,只要存在偏差,積分環(huán)節(jié)就會(huì)不斷起作用,主要用于消除靜態(tài)誤差,提高系統(tǒng)的無(wú)差度。
引入積分環(huán)節(jié)后,比例+積分環(huán)節(jié)的公式如下:

u —輸出
e —偏差
∑e—累計(jì)偏差
Kp—比例系數(shù)
Ki—積分系數(shù)
通過(guò)以大棚溫控分析可以知道,如果溫控系統(tǒng)的比例環(huán)節(jié)作用被抵消,存在靜態(tài)誤差 5℃,此時(shí)偏差存在,積分環(huán)節(jié)會(huì)一直累計(jì)偏差,以此增大輸出,從而消除靜態(tài)誤差。
從上述公式中可以得知,當(dāng)積分系數(shù) Ki 或者累計(jì)偏差越大時(shí),輸出就越大,系統(tǒng)消除靜態(tài)誤差的時(shí)間就越短。
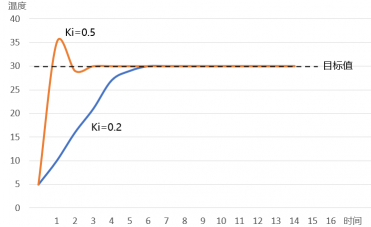
當(dāng)Ki的值越大時(shí),其對(duì)應(yīng)的橙色曲線達(dá)到目標(biāo)值的時(shí)間就越短,與此同時(shí),橙色曲線出現(xiàn)了一定幅度的超調(diào)和振蕩,這會(huì)使得系統(tǒng)的穩(wěn)定性下降
因此,我們?cè)谠O(shè)置積分系數(shù)的時(shí)候,并不是越大越好,而是要兼顧消除靜態(tài)誤差的時(shí)間以及整個(gè)系統(tǒng)的穩(wěn)定性。
只要系統(tǒng)還存在偏差,積分環(huán)節(jié)就會(huì)不斷地累計(jì)偏差。當(dāng)系統(tǒng)偏差為 0的時(shí)候,說(shuō)明已經(jīng)達(dá)到目標(biāo)值,此時(shí)的累計(jì)偏差不再變化,但是積分環(huán)節(jié)依舊在發(fā)揮作用(此時(shí)往往作用最大),這就很容易產(chǎn)生超調(diào)的現(xiàn)象了。
因此,我們需要引入微分環(huán)節(jié),提前減弱輸出,抑制超調(diào)的發(fā)生。
微分環(huán)節(jié)(Differential)
微分環(huán)節(jié)可以反應(yīng)偏差量的變化趨勢(shì),根據(jù)偏差的變化量提前作出相應(yīng)控制,減小超調(diào),克服振蕩。引入微分環(huán)節(jié)后,比例+積分+微分環(huán)節(jié)的公式如下:

我們繼續(xù)使用大棚溫控去分析微分環(huán)節(jié)的作用。如果溫控系統(tǒng)目標(biāo)溫度為 30℃,在上午八點(diǎn)的時(shí)候存在偏差15℃,經(jīng)過(guò)一段時(shí)間的調(diào)節(jié),到了上午九點(diǎn),此時(shí)偏差已經(jīng)縮小到5℃,偏差的變化量= 九點(diǎn)的偏差(第 k 次)-八點(diǎn)的偏差(第 k-1 次)= -10,結(jié)合上述公式可知,此時(shí)微分環(huán)節(jié)會(huì)削弱比例和積分環(huán)節(jié)的作用,減小輸出以抑制超調(diào)。
最終得到了一個(gè) PID算法公式:

這個(gè)公式是 PID 離散公式之一,除了離散公式之外,PID 還有連續(xù)的公式,但是因?yàn)檫B續(xù)的公式不利于機(jī)器計(jì)算,我們一般不研究。每一個(gè)系統(tǒng)的 PID 系數(shù)并不是通用的,這需要根據(jù)實(shí)際的情況去設(shè)置。
04PID 算法離散公式
位置式 PID 公式

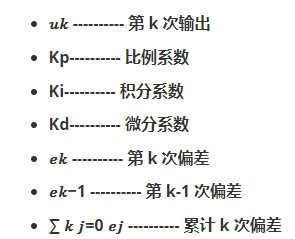
這個(gè)公式的計(jì)算需要全部控制量參與,它的每一次輸出都和過(guò)去的狀態(tài)有關(guān)。
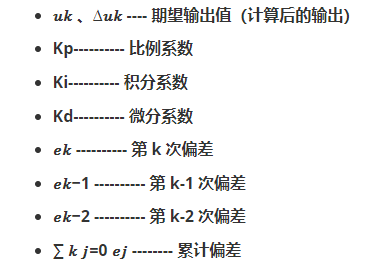
增量式 PID 公式
通過(guò)位置式的 PID 公式,可推導(dǎo)出增量式 PID 公式
將 k = k-1 代入位置式 PID 公式

由

增量式 PID 可以看出,增量式 PID 的計(jì)算并不需要一直累計(jì)偏差,它的輸出與近三次的偏差有很大關(guān)系。
注意:增量式 PID 公式輸出的只是控制量的增量。假設(shè)電機(jī)實(shí)際轉(zhuǎn)速為 50RPM,現(xiàn)在我們要讓它加速到 60RPM,如果采用的是位置式 PID,系統(tǒng)將直接輸出 60RPM 對(duì)應(yīng)的控制量(占空比);
如果采用的是增量式 PID,系統(tǒng)將輸出提速 10RPM對(duì)應(yīng)的控制量(占空比),此時(shí)我們還需要加上上次(50RPM)的輸出。
兩個(gè) PID 公式的不同點(diǎn)
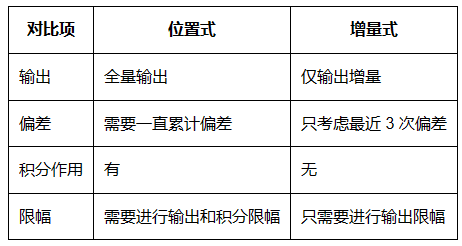
兩種PID公式的優(yōu)缺點(diǎn)
① 位置式:
優(yōu)點(diǎn):位置式 PID 是一種非遞推式算法,帶有積分作用,適用于不帶積分部件的對(duì)象。
缺點(diǎn):全量計(jì)算,計(jì)算錯(cuò)誤影響很大;需要對(duì)偏差進(jìn)行累加,運(yùn)算量大。
② 增量式:
優(yōu)點(diǎn):只輸出增量,計(jì)算錯(cuò)誤影響小;不需要累計(jì)偏差,運(yùn)算量少,實(shí)時(shí)性相對(duì)較好。
缺點(diǎn):積分截?cái)嘈?yīng)大,有穩(wěn)態(tài)誤差。
05積分飽和問(wèn)題
在位置式 PID 中,如果系統(tǒng)長(zhǎng)時(shí)間無(wú)法達(dá)到目標(biāo)值,累計(jì)偏差(積分)就會(huì)變得很大,此時(shí)系統(tǒng)的響應(yīng)就很慢了。
例如某個(gè)電機(jī)能達(dá)到的最大速度為 300RPM,而我們?cè)O(shè)置了目標(biāo)速度為 350RPM,這明顯是一個(gè)不合理的目
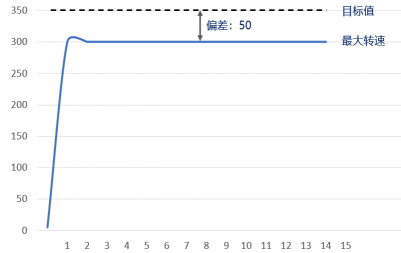
由于系統(tǒng)長(zhǎng)時(shí)間無(wú)法達(dá)到目標(biāo)值,累計(jì)偏差(積分)會(huì)變得越來(lái)越大,逐漸達(dá)到深度飽和的狀態(tài),此時(shí)我們?cè)僭O(shè)置一個(gè)合理范圍的目標(biāo)速度(例如 200RPM),系統(tǒng)就沒(méi)有辦法在短時(shí)間內(nèi)響應(yīng)了。
為了避免位置式 PID 中可能出現(xiàn)的積分飽和問(wèn)題,可以考慮下面解決方法:
①優(yōu)化 PID 曲線,系統(tǒng)越快達(dá)到目標(biāo)值,累計(jì)的偏差就越小;
②限制目標(biāo)值調(diào)節(jié)范圍,規(guī)避可以預(yù)見(jiàn)的偏差;
③進(jìn)行積分限幅,在調(diào)整好 PID 系數(shù)之后,根據(jù)實(shí)際系統(tǒng)來(lái)選擇限幅范圍。
06PID算法代碼實(shí)現(xiàn)
控制量相關(guān)的結(jié)構(gòu)體
我們知道PID 的離散化公式后,實(shí)現(xiàn) PID 算法的代碼是非常簡(jiǎn)單。
定義結(jié)構(gòu)體來(lái)管理這些控制量
typedef struct
{
__IO float SetPoint; /* 目標(biāo)值 */
__IO float ActualValue; /* 期望輸出值 */
__IO float SumError; /* 偏差累計(jì) */
__IO float Proportion; /* 比例系數(shù) P */
__IO float Integral; /* 積分系數(shù) I */
__IO float Derivative; /* 微分系數(shù) D */
__IO float Error; /* Error[1],第 k 次偏差 */
__IO float LastError; /* Error[-1],第 k-1 次偏差 */
__IO float PrevError; /* Error[-2],第 k-2 次偏差 */
} PID_TypeDef;
PID 算法代碼
位置式 PID 代碼
/* * @brief pid 閉環(huán)控制 * @param *PID:PID 結(jié)構(gòu)體變量地址 * @param Feedback_value:當(dāng)前實(shí)際值 * @retval 期望輸出值 */ int32_t own_pid_ctrl(PID_TypeDef *PID,float Feedback_value) { PID->Error = (float)(PID->SetPoint - Feedback_value); /* 計(jì)算偏差 */ PID->SumError += PID->Error; /* 累計(jì)偏差 */ PID->ActualValue = (PID->Proportion * PID->Error) /* 比例環(huán)節(jié) */ + (PID->Integral * PID->SumError) /* 積分環(huán)節(jié) */ + (PID->Derivative * (PID->Error - PID->LastError)); /* 微分環(huán)節(jié) */ PID->LastError = PID->Error; /* 存儲(chǔ)偏差,用于下次計(jì)算 */ return ((int32_t)(PID->ActualValue)); /* 返回計(jì)算后輸出的數(shù)值 */ }
own_pid_ctrl 函數(shù)用來(lái)進(jìn)行位置式 PID 的控制,該函數(shù)的 2 個(gè)形參:PID 傳入 PID控制量相關(guān)的結(jié)構(gòu)體地址;Feedback_value 傳入當(dāng)前系統(tǒng)的實(shí)際值,用于計(jì)算偏差。
在函數(shù)中,我們先計(jì)算本次偏差 Error,然后把偏差累計(jì),存入 SumError 成員當(dāng)中,接著根據(jù)位置式的公式進(jìn)行三個(gè)環(huán)節(jié)的計(jì)算,計(jì)算后的期望輸出存入 ActualValue 成員當(dāng)中,然后存儲(chǔ)本次偏差,最后返回期望輸出值。
增量式 PID 代碼
/*
* @brief pid 閉環(huán)控制
* @param *PID:PID 結(jié)構(gòu)體變量地址
* @param Feedback_value:當(dāng)前實(shí)際值
* @retval 期望輸出值
*/
int32_t own_pid_ctrl(PID_TypeDef *PID,float Feedback_value)
{
PID->Error = (float)(PID->SetPoint - Feedback_value); /* 計(jì)算偏差 */
PID->ActualValue +=
/* 比例環(huán)節(jié) */
(PID->Proportion * (PID->Error - PID->LastError))
/* 積分環(huán)節(jié) */
+ (PID->Integral * PID->Error)
/* 微分環(huán)節(jié) */
+ (PID->Derivative * (PID->Error - 2 * PID->LastError + PID->PrevError));
PID->PrevError = PID->LastError; /* 存儲(chǔ)偏差,用于下次計(jì)算 */
PID->LastError = PID->Error;
return ((int32_t)(PID->ActualValue)); /* 返回計(jì)算后輸出的數(shù)值 */
}
增量式 PID 的代碼實(shí)現(xiàn)和位置式是非常類似的,所以我們?cè)趯?shí)際的代碼實(shí)現(xiàn)中,可以通過(guò)一個(gè)宏定義來(lái)切換這兩種不同的算法,值得注意的是,增量式 PID 輸出的是調(diào)節(jié)量,所以計(jì)算期望輸出值 ActualValue 的時(shí)候是自增運(yùn)算,這一點(diǎn)和位置式 PID 是不一樣的。
審核編輯:湯梓紅
-
控制系統(tǒng)
+關(guān)注
關(guān)注
41文章
6353瀏覽量
109898 -
控制電路
+關(guān)注
關(guān)注
81文章
1670瀏覽量
135478 -
PID算法
+關(guān)注
關(guān)注
2文章
169瀏覽量
24204 -
PID
+關(guān)注
關(guān)注
35文章
1463瀏覽量
84617 -
直流有刷電機(jī)
+關(guān)注
關(guān)注
0文章
43瀏覽量
1446
原文標(biāo)題:換個(gè)角度聊聊PID吧,很干。
文章出處:【微信號(hào):All_best_xiaolong,微信公眾號(hào):大魚機(jī)器人】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
總結(jié)STM32控制中常見(jiàn)的PID算法 理解萬(wàn)能的PID算法
【最新課程推薦】PID控制算法
一文看懂PID算法
一堂課幫你搞定PID算法
掌握PID算法
理解PID控制
對(duì)于PID控制/算法的理解
講述PID算法中積分項(xiàng)的優(yōu)化
pid算法_什么是pid算法







 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論