 如何實現單車智能與V2X融合協同控制功能研究與驗證?
如何實現單車智能與V2X融合協同控制功能研究與驗證?
編者寄語:
“單車智能+車路協同”已被視為未來自動駕駛和智慧交通發展的重要技術路徑,進行融合協同控制功能仿真驗證對于產業發展和加速落地具有重要意義。 本文將帶來單車智能與V2X融合仿真系統的概括與介紹。
01車路協同技術發展情況概述
目前,V2X技術發展已經取得了顯著進步,其應用可分為近期和中遠期兩大階段。 近期通過車車協同、車路協同實現輔助駕駛,提高駕駛安全,提升交通效率; 以及特定場景的中低速無人駕駛,提高生產效率,降低成本。 中長期將結合人工智能、大數據等新技術,融合雷達、視頻感知等技術,通過車聯網實現從單車智能到網聯智能,最終實現完全自動駕駛。
“單車智能+車路協同”已被視為未來自動駕駛和智慧交通發展的重要技術路徑,5G-V2X是其實現的重要基礎。 《中國新車評價規程(C-NCAP)路線圖(2022-2028年)》中明確應用C-V2X車聯技術實現主動安全場景,比如引入基于C-V2X通信技術的安全預警場景,豐富自動緊急制動的測試場景。
C-V2X提供的通信和聯網能力,將助力智能汽車在未來實現自動駕駛所需的協同感知、決策和執行控制功能。 “單車智能+車路協同”自動駕駛成為未來的發展趨勢,但目前關于單車智能和V2X技術融合后的新應用功能探索研究比較少并且缺乏研究、驗證環境及相關探索工具。 雖然已有國內建成的車聯網先導區可以開展融合協同控制功能驗證,但融功能研究探索實施起來還不是很便捷,場景復現性差,測試成本高。
單車智能與V2X融合協同控制功能研究與驗證系統能發揮出巨大優勢,可以作為融合功能研究探索工具。 其中行業對于融合功能的維度可以分為兩個層次:
01弱融合
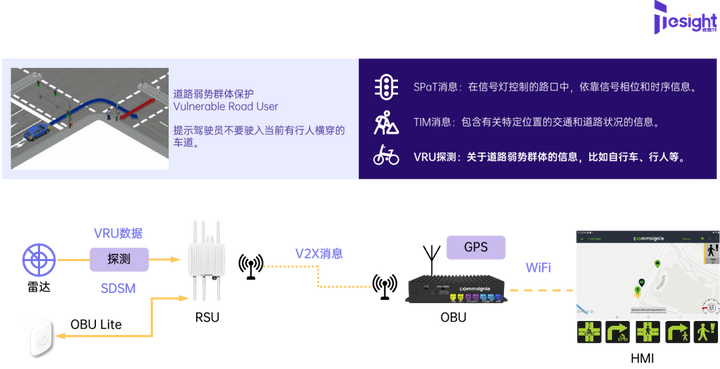
單純增加V2X技術,OBU單獨發出預警,比如路口鬼探頭場景。 典型的標準場景均可應用。 將單車智能車輛直接加上V2X技術。 方便直接量產應用。
02強融合
OBU獲得的信息和ADAS 傳感器或者自動駕駛控制器獲得的單車智能傳感器信息進行融合,控制器根據二者信息綜合決策發出下一步指令,深度融合后的新應用功能可能和ADAS功能或者自動駕駛功能響應一致,也可不一致。 包含CADAS和 CAD。 比如C-NCAP中主動安全場景:速度預警場景、速度輔助系統(C-SAS)、AEB鬼探頭場景,C-AEB、盲區監測系統C-BSD等。
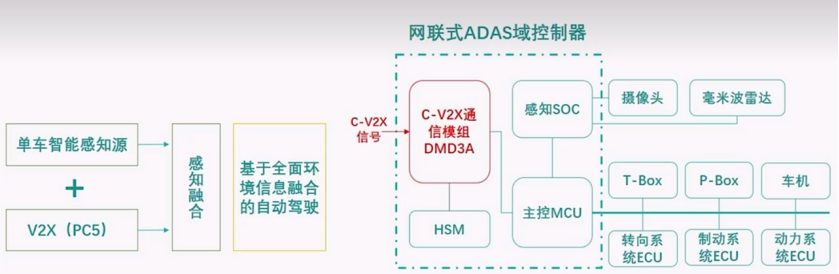
目前市面上已有一些C-V2X與單車視覺、毫米波感知進行融合的域控制器產品,支持C-V2X直連通信,可實現車車(V2V)、車路(V2I)協同,并集成前向視覺和雷達處理功能,將V2V、V2I感知結果直接引入車輛運動軌跡規劃、線性控制算法中,在車輛視覺感知性能下降的特殊場景中,如:橫向車輛切入、十字路口建筑物遮擋、雨霧天氣等, 實現網聯式高級駕駛輔助功能的擴展和增強。
02單車智能與V2X融合仿真系統介紹
V2X技術和自動駕駛功能的融合,將為自動駕駛車輛提供更多的信息和指導,從而更好地處理周圍環境的變化和威脅,提高自動駕駛的安全性。 中汽智聯基于在智能駕駛及V2X仿真領域的積累,面對行業前沿需求,開發了單車智能與V2X融合協同控制功能研究與驗證系統,為單車智能和V2X技術融合后的新應用功能探索提供研究環境和工具。
總體來講,單車智能與V2X融合控制功能仿真驗證系統分為硬件在環HIL和實車在環VIL兩類。 具體包括場景仿真軟件、車輛動力學軟件、測試管理軟件、實時機、V2X測試軟件、V2X PC5仿真器、衛星信號模擬器、主車OBU、被測融合功能控制器、上位機、工控機等。 系統架構流程圖如下所示。
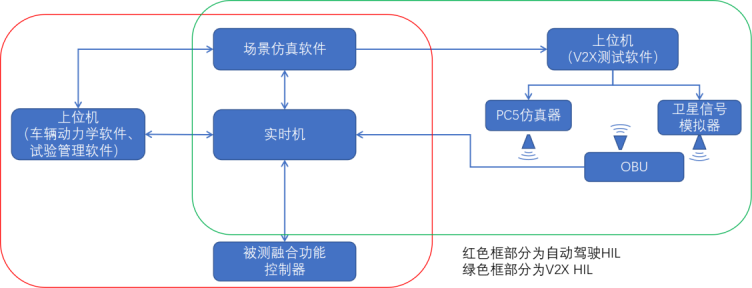
V2X融合功能仿真驗證臺架是一種融合了自動駕駛HIL系統和V2X HIL 系統的臺架,主要用于滿足融合功能驗證與測試的需求。自動駕駛HIL系統是一個虛擬測試環境,利用場景仿真軟件可以為兩個系統提供虛擬交通場景,而V2X HIL系統則需要V2X測試軟件來提取交通場景信息并按照協議打包,發送給V2X信號模擬器和衛星信號模擬器,OBU將接收到信號通過CAN或者以太網接口發回實時機并傳送給被測融合功能控制器。
在自動駕駛HIL系統中,動力學模型軟件為被控車輛提供車輛動力學模型,并部署到實時機上,而測試管理軟件則可以實現將虛擬場景中主車信息、車載視角傳感器探測到的其他交通參與者信息發送給融合功能控制器。
以單攝像頭融合為例,V2X融合功能仿真驗證系統還需要配置攝像頭傳感器模型,攝像頭模型的輸出數據由場景仿真軟件輸出到實時機上,并通過視頻數據處理板卡輸出GSML接口的數據一起發送給融合控制器,同時V2X鏈路OBU將收到的信息發送給融合功能控制器,實現一路攝像頭數據與OBU信息的融合。
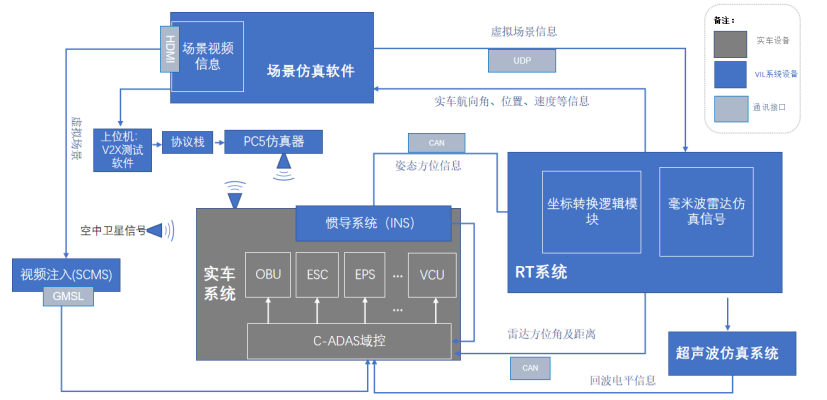
融合功能控制器通過自身車輛狀態信息和接收的單車智能傳感器信息和OBU信息進行決策并發出控制指令給到動力學模型,輸出的結果反饋至場景軟件進行顯示。
在此系統中,通過將場景仿真軟件中的場景時間戳加在被發送信號中的方式,來保證驗證過程中的兩條鏈路的同步性。其中一路信號將主車位置信息、單車智能傳感器探測的信息發送給融合功能控制器;另一路信號通過V2X測試軟件提取并發送給PC5仿真器、衛星信號模擬器,OBU將接收的信號在傳送至被測融合控制器。
以單攝像頭融合V2X信號的C-ADAS控制器為例,開展了“單車智能與V2X融合控制功能仿真驗證系統VIL級驗證嘗試。
通過該系統可以開展單車智能與V2X融合協同控制功能研究,對融合場景下對應的功能進行探索驗證,并梳理出來相應的功能定義,支持后續融合功能算法技術落地。同時也可以通過該系統進行融合協同控制功能驗證。
03單車智能與V2X融合仿真意義總結
V2X與自動駕駛融合功能仿真測試,將有效驗證V2X技術在自動駕駛車輛中的安全性,有助于更好地控制自動駕駛車輛的行為,降低交通事故的發生率,從而實現安全可靠的自動駕駛。
V2X與自動駕駛融合功能仿真測試系統具有巨大的市場潛力,為單車智能和V2X技術融合后的新應用功能探索提供研究環境和工具,可以有效改善自動駕駛車輛的安全性和可靠性,使車輛在復雜的道路環境中行駛得更安全。
審核編輯:湯梓紅
-
仿真系統
+關注
關注
1文章
95瀏覽量
20629 -
5G
+關注
關注
1353文章
48380瀏覽量
563443 -
自動駕駛
+關注
關注
783文章
13694瀏覽量
166165 -
V2X
+關注
關注
25文章
209瀏覽量
43465 -
車路協同
+關注
關注
1文章
56瀏覽量
3926
原文標題:技術科普丨如何實現單車智能與V2X融合協同控制功能研究與驗證?
文章出處:【微信號:智能汽車電子與軟件,微信公眾號:智能汽車電子與軟件】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
V2X標注之爭 中國V2X通信標準亟待確立

在了解車聯網之前,你知道V2X是什么嗎?
基于飛凌i.MX8MQ核心板實現V2X方案
5分鐘成為車聯網專家|如何實現C-V2X技術突破把住車聯網發展命門 精選資料分享
淺談TTS語音技術在車聯網V2X中是如何應用的
別克V2X:要真正發揮V2X應用的功能,僅著眼于車端不夠
V2X HIL測試的詳細介紹
在自動駕駛汽車中實現5G和DSRC V2X

基于C-V2X的車路協同自動駕駛關鍵技術與應用
V2X技術與智能傳感器的完美融合:提升城市道路安全
基于V2X和自動駕駛HIL聯調的仿真測試系統開發






 工商網監
工商網監
評論