") 可編程風(fēng)扇控制器
可編程風(fēng)扇控制器
隨著當(dāng)今的系統(tǒng)在更小的外殼中實(shí)現(xiàn)不斷提高的性能,它們的功耗帶來了越來越嚴(yán)重的問題。保持適當(dāng)溫度的需求對于防止熱關(guān)斷甚至系統(tǒng)故障至關(guān)重要。因此,許多系統(tǒng)現(xiàn)在需要額外的風(fēng)扇來保持足夠的氣流。本應(yīng)用筆記概述了風(fēng)扇控制模塊,并給出了一個簡單的風(fēng)扇控制器電路,該電路使用MAX6870監(jiān)測6個風(fēng)扇。
風(fēng)扇控制模塊概述
大型電信和網(wǎng)絡(luò)系統(tǒng)通常采用高性能處理器,可在單個“機(jī)架”內(nèi)實(shí)現(xiàn)更強(qiáng)大的功能。例如,曾經(jīng)支持 12 條 ADSL 線路的線卡現(xiàn)在可以支持多達(dá) 64 條線路。因此,曾經(jīng)耗散24W(每條ADSL線路2W)的電路板現(xiàn)在必須耗散128W。這種耗散水平可以通過強(qiáng)力冷空氣流來適應(yīng),從而降低相關(guān)的熱阻。
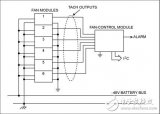
大多數(shù)電信系統(tǒng)都包含大量風(fēng)扇。為了確保在風(fēng)扇發(fā)生故障時(shí)正常運(yùn)行,系統(tǒng)通常包括比所需更多的風(fēng)扇(N+1結(jié)構(gòu)),因此典型的系統(tǒng)可能有六到八個風(fēng)扇。每個風(fēng)扇都有自己的電源,因此無需關(guān)閉系統(tǒng)電源即可輕松更換風(fēng)扇。子機(jī)架風(fēng)扇組件(圖 1)包括多個風(fēng)扇模塊(本例中為 6 個),由 -48V 電池總線供電,并由風(fēng)扇控制模塊監(jiān)控。
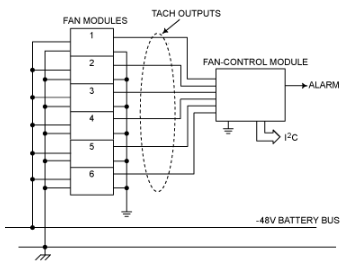
圖1.風(fēng)扇模塊的典型子機(jī)架。
基本風(fēng)扇模塊(圖 2)包括一個隔離式 DC-DC 轉(zhuǎn)換器,可將 -48V 電池電源轉(zhuǎn)換為 +12V 或 +24V,具體取決于風(fēng)扇類型。熱插拔控制器位于轉(zhuǎn)換器之前,允許在不關(guān)閉系統(tǒng)電源的情況下更換風(fēng)扇,每個風(fēng)扇產(chǎn)生與其旋轉(zhuǎn)速率成比例的數(shù)字輸出(PWM 或 PFM),供控制模塊使用。
圖2.風(fēng)扇模塊框圖。
這種類型的風(fēng)扇系統(tǒng)可以使用多種 IC。例如,許多熱插拔控制器具有不同的性能水平。例如,MAX5901提供簡單的解決方案,而MAX5920提供高精度。兩款器件均可直接采用-48V電源工作。MAX5021非常適合隔離電源,而MAX5043則非常適合板載功率MOSFET的高集成度轉(zhuǎn)換器。MAX5043只需要一個變壓器、電容、輸出二極管和幾個電阻即可產(chǎn)生50W的功率,無需散熱器。
可以集成風(fēng)扇控制單元以完成該系統(tǒng)。此類控件必須提供具有許多風(fēng)扇模塊的接口,并且必須能夠檢測模塊是否正常工作。當(dāng)風(fēng)扇發(fā)生故障時(shí),它必須標(biāo)記主控制單元。還需要診斷和確定哪個風(fēng)扇出現(xiàn)故障。這樣的控制器可以采取多種形式。例如,它可以通過一組定時(shí)器和額外的分立元件來實(shí)現(xiàn)。然而,隨著風(fēng)扇數(shù)量的增加,分立元件的數(shù)量也會增加,這使得這種方法不太受歡迎。另一種技術(shù)是微控制器(μC)上的多個串行I/O,可最大限度地減少分立元件,但需要正確的編程。
第三種相當(dāng)簡單的替代方案采用高度集成、EEPROM可配置、可編程的六進(jìn)制電源排序器/監(jiān)控器,并帶有ADC。例如,MAX6870包括4個可配置輸入電壓檢測器、<>個通用輸入、<>個可配置看門狗、<>個可編程輸出和一個<>kb用戶EEPROM。所有產(chǎn)品均可用,可通過 I 進(jìn)行編程2C 兼容串行接口。除了監(jiān)控電壓、看門狗信號、外部溫度和其他邏輯輸入信號外,該器件還可用作風(fēng)扇控制器,能夠監(jiān)控多達(dá) 10 個風(fēng)扇。
實(shí)施 6 風(fēng)扇系統(tǒng)
為了說明這一點(diǎn),我們將首先介紹一個單風(fēng)扇系統(tǒng),然后將該系統(tǒng)擴(kuò)展到六個風(fēng)扇。
我們首先定義一個報(bào)警信號,用于斷言受監(jiān)控的風(fēng)扇是否停止。目前可用的大多數(shù)風(fēng)扇都提供開放式收集器(V超頻) 可上拉至外部電壓電平 (V 的輸出信號)S) 使用電阻器。(本例中的上拉電壓為4V至30V。這樣的V超頻0V 至 V 的輸出脈沖S風(fēng)扇每轉(zhuǎn)一圈數(shù)倍M(圖3)。
圖3.圖 2 中風(fēng)扇模塊的輸出詳細(xì)信息。
如果風(fēng)扇以每秒 N 轉(zhuǎn)的速度旋轉(zhuǎn),則 V超頻每秒產(chǎn)生 N × M 個脈沖。輸出是頻率為 N × M Hz 的方波。如果該輸出連接到MAX6870可編程輸入之一,則當(dāng)風(fēng)扇停止轉(zhuǎn)動時(shí),其PO_輸出之一置位。
例如,如果 VS= 5V,輸出脈沖在0V至5V之間。取決于風(fēng)扇停止時(shí)的電壓電平(VS或 0V),將輸入欠壓或過壓閾值設(shè)置為 2.5V,以便在輸入電壓高于(低于)2.5V 時(shí)監(jiān)視器輸出為真(反之亦然)。在這種配置中,風(fēng)扇轉(zhuǎn)動時(shí)PO_輸出被取消置位,輸出電壓在5V和0V之間連續(xù)脈沖。如果風(fēng)扇停止轉(zhuǎn)動,輸出將置位,電壓保持高或低,具體取決于風(fēng)扇的有效極性如何編程。
對于此實(shí)現(xiàn)方案而言,選擇一個毛刺濾波器,為每個PO_輸出提供正確的時(shí)間常數(shù)非常重要。但是,濾波器必須足夠松弛,以允許由于風(fēng)扇電源振蕩引起的頻率脈沖瞬變。MAX6870所需的時(shí)間常數(shù)范圍為25μs至1600ms。
例如,考慮一個 M = 2 且 N = 54rps 的場景。五世超頻因此脈沖頻率為108Hz,脈沖周期約為9.26ms。如果需要嚴(yán)格控制風(fēng)扇,請選擇 25ms 的PO_抖動時(shí)間常數(shù),相當(dāng)于風(fēng)扇的大約 1.35 圈。考慮到風(fēng)扇供應(yīng)振蕩(以及由于熱特性引起的任何限制),我們假設(shè)風(fēng)扇在停止大約兩秒鐘時(shí)出現(xiàn)故障。對于此示例,1.6 秒超時(shí)是合適的。這意味著PO_警報(bào)在風(fēng)扇故障后 25 毫秒或 1.6 秒后變?yōu)楦撸ɑ虻停Q于編程)。
上面的示例顯示了如何為一個風(fēng)扇實(shí)現(xiàn)該功能。對于6風(fēng)扇系統(tǒng),我們只使用一個MAX6870,并將上述擴(kuò)展至4路輸入和<>路輸出。這種布置允許六個風(fēng)扇中的每一個都有一個監(jiān)視器,假設(shè)每個風(fēng)扇模塊都有獨(dú)立的轉(zhuǎn)速計(jì)輸出。輸出可配置為漏極開路,并一起通過“或”組合以提供一個報(bào)警信號(圖 <>)。如果在報(bào)警觸發(fā)之前需要相反的信號極性或額外的延遲,請將上述公共信號連接到GPI_引腳和另外一個PO_輸出,并添加另一個時(shí)間常數(shù)。
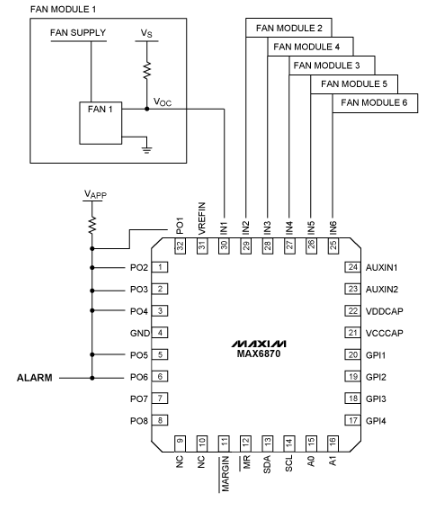
圖4.基于MAX6電源排序器/監(jiān)控器的6870風(fēng)扇監(jiān)視器。
配置這樣的器件可能看起來很耗時(shí),但MAX6870不需要軟件工程師為控制μC或其它器件編寫代碼。Maxim提供評估板,其圖形用戶界面簡化了配置過程(圖5)。
圖5.MAX6870編程軟件的屏幕截圖。
只需指向接口塊并輸入適當(dāng)?shù)闹担ㄝ斎胄盘枴r(shí)序等),沒有軟件經(jīng)驗(yàn)的工程師即可輕松配置MAX6870。設(shè)置滿意后,對IC進(jìn)行編程,然后單擊“加載到內(nèi)存”按鈕,為應(yīng)用做好準(zhǔn)備。MAX6870是首款設(shè)計(jì)用于復(fù)雜系統(tǒng)監(jiān)測的多輸入控制器。它精確且可配置,簡化了現(xiàn)代系統(tǒng)的設(shè)計(jì)。
審核編輯:郭婷
-
電源
+關(guān)注
關(guān)注
184文章
17592瀏覽量
249504 -
處理器
+關(guān)注
關(guān)注
68文章
19166瀏覽量
229152 -
轉(zhuǎn)換器
+關(guān)注
關(guān)注
27文章
8627瀏覽量
146872
發(fā)布評論請先 登錄
相關(guān)推薦
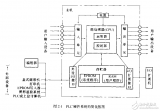
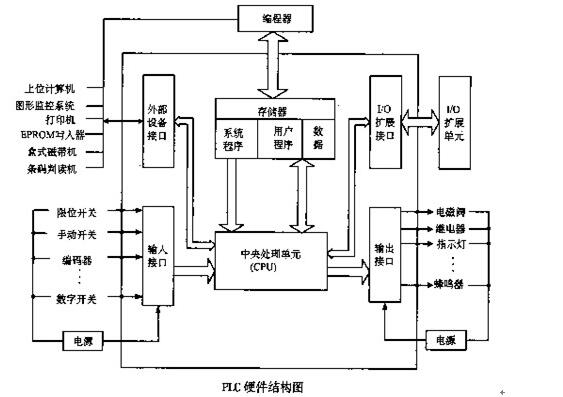
什么是可編程邏輯控制器?可編程邏輯控制器有哪些特點(diǎn)?
可編程控制器概述 ppt
可編程控制器(PLC)
可編程控制器原理及應(yīng)用 PPT
可編程控制器系統(tǒng)構(gòu)成與工作原理
可編程控制器基本指令
可編程風(fēng)扇控制器
可編程控制器基本知識_可編程控制器原理及應(yīng)用
可編程控制器的特點(diǎn)有哪些
可編程控制器PLC概述






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論