 開關電源環路穩定性分析(七)
開關電源環路穩定性分析(七)
大家好,這里是大話硬件。
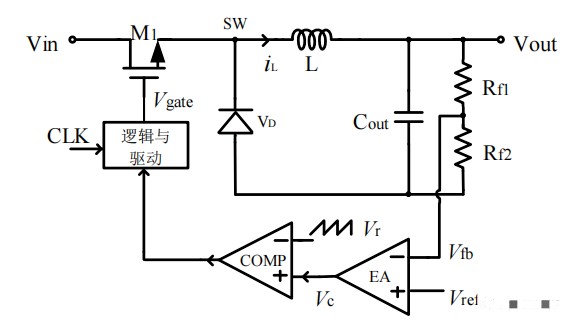
在前面的文章中,已經分析了控制級和功率級的傳遞函數,這一節咱們來分析反饋級的傳遞函數。
在分析反饋網絡的傳遞函數之前,我想,應該有幾個問題需要做一下介紹。
1. 功率級和控制級傳遞函數說明了什么?
根據前面的傳遞函數的表達式可知,帶有兩個阻抗L,C元件的傳遞函數,在轉折頻率以后,在增益上斜率為-2,表現為-40dB/dec的特性,在足夠寬的頻率范圍內相位偏移達到-180°。
這樣的性質說明兩個特點:
(1)傳遞函數會以較快的頻率(-2斜率)穿過0dB;
(2)相位會到達-180
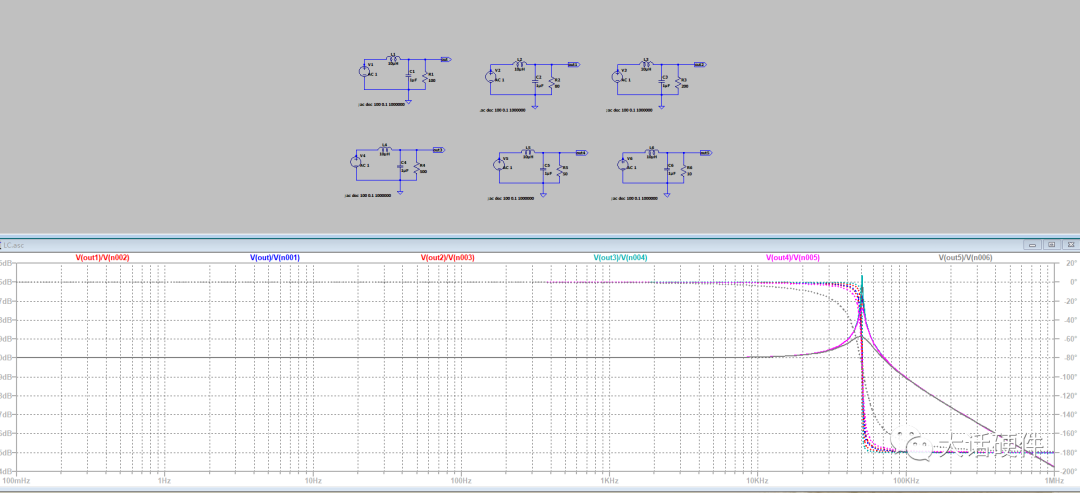
下面仿真的不同負載電阻條件下,LCR 電路的波特圖,從結果可以看出,只要是LC的值確定,轉折頻率確定,諧振峰的大小和負載電阻有關系。 在轉折頻率處相位會有突變,增益會以-40dB/dec的特性降低。
2.零點和極點的作用
左邊平面零點會使增益以+20dB的斜率上升,相位增加90度。
左邊平面的極點會使增益以-20dB斜率下降,相位減少90°
3. 什么樣的開關電源是穩定可靠的?
講了這么久,我們一直在說開關電源要穩定,到底什么樣的電源才算是穩定的呢?
在此之前其實也給大家分析過,判斷一個電源穩定與否,除了測試,我們就只能使用數學的工具來判斷是否穩定。
因此,在評定開關電源穩定性時,會用下面這兩個條件來評定開關電源是否穩定。
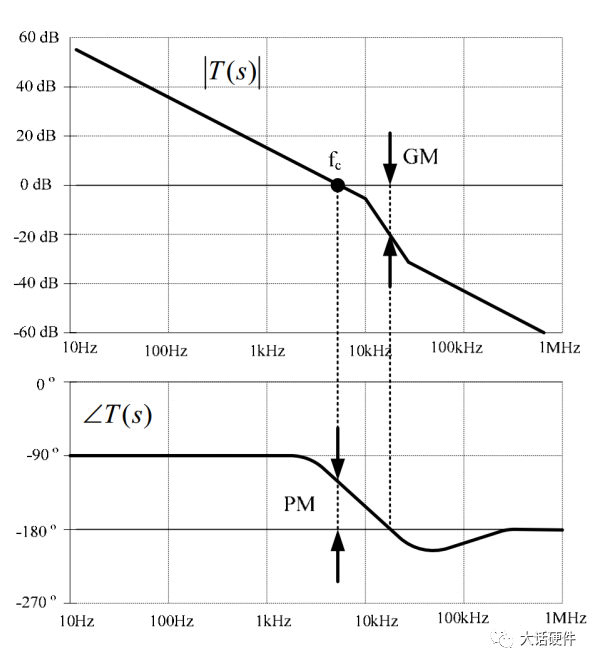
增益裕度:GM一般需6dB的增益裕量;
相位裕度:PM一般需要45°的相位裕量;
斜率要求:為防止-40dB/dec增益斜率,相位變化太快,增益曲線穿過0dB的時候,最好是以-20dB/dec;
從上面3個條件可以看出,增益有要求,斜率有要求,相位也有要求。
上面的要求,是不是有點像大家看到的找對象要求:身高>180,體重<150,一般這兩條很難滿意,往往會再加上幾條。
開關電源也是這樣,其實增益裕度和相位裕度已經可以保證電源穩定,但是環境中存在的不確定性太多,增加的條件越多,開關電源就越穩定。
4. 開關電源環路補償其實不算難
分析到這里,其實環路補償這件事,說難,也不難,說簡單也很難。
簡單的原因:
首先,我知道判斷一個電源是否穩定的要求是什么,上面列出了3條;
其次,我求出了控制級和功率級的傳遞函數,剩下就是用補償環路補償一下;
最后,使整個環路保持穩定,滿足要求。
說難的原因:
開關電源的拓撲種類眾多,補償環路形式多樣;
開關電源是模擬和數字的混合電路,不同需求,環路補償要求不一樣;
目前沒有通用的設計,設計需要差異化;
像不像還在找對象的你,說難吧,你就是需要認識一個異性而已; 說不難吧,要認識自己滿意的,是不是對你來說,又有些難.
5.電壓型和電流型補償網絡
上面通過實際的分析和拆解,把電源環路分析這件事看成是實際和標準之間的差異,是不是簡單很多。
目前用的比較多的環路補償主要有電壓型和電流型兩種,其中電壓型有3種,分為I型,II型,III型,電流的也有3種和電壓的基本一致。
電壓型補償拓撲如下:
電流型補償拓撲如下:
6. 三種類型電壓補償網絡介紹
在往下繼續讀之前,我想你肯定在很多場合聽過電壓補償有3型,分別是I型,II型,III型。 下面我們對3個類型進行詳細分析。
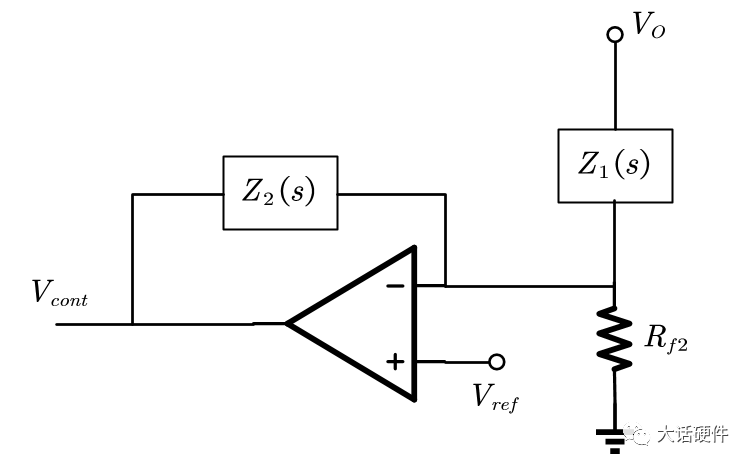
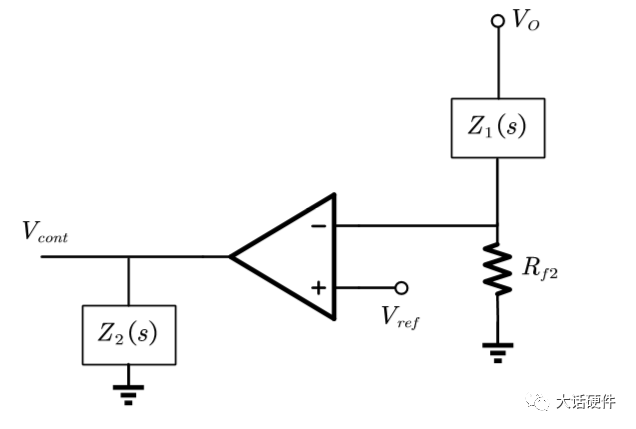
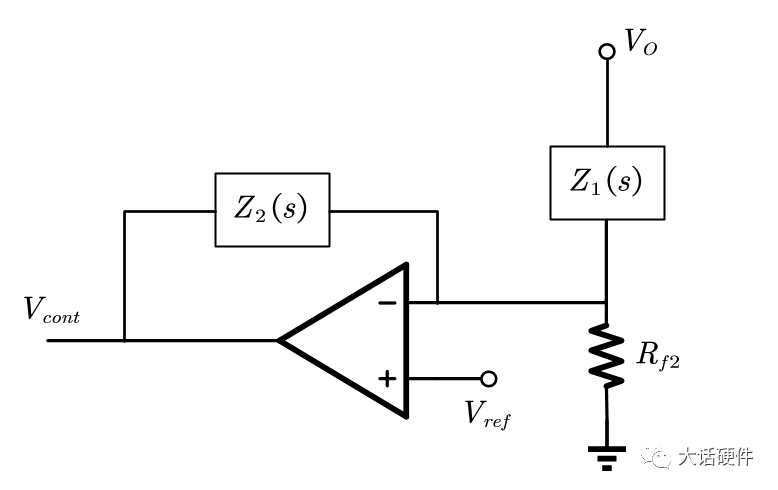
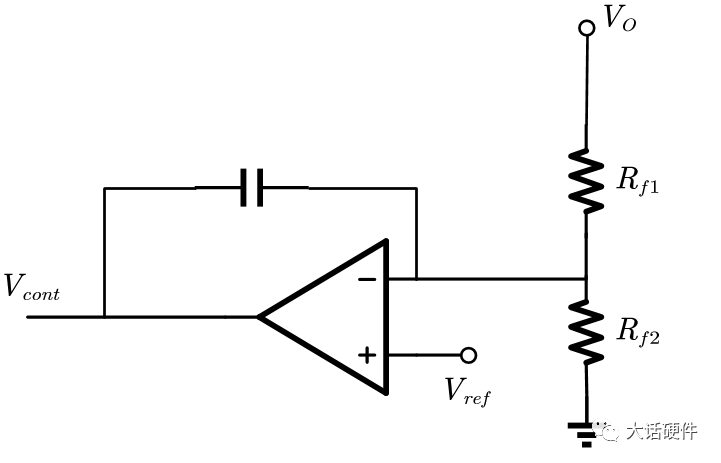
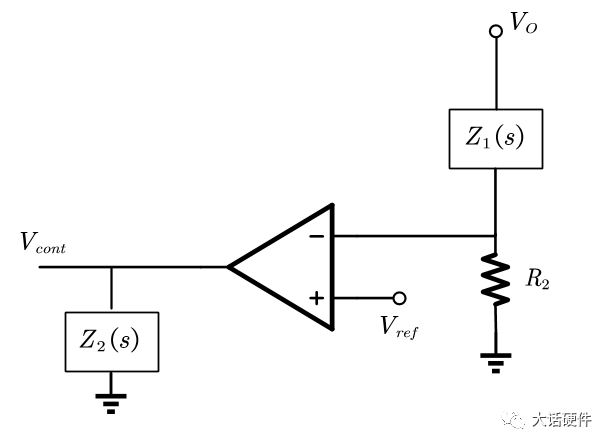
I型
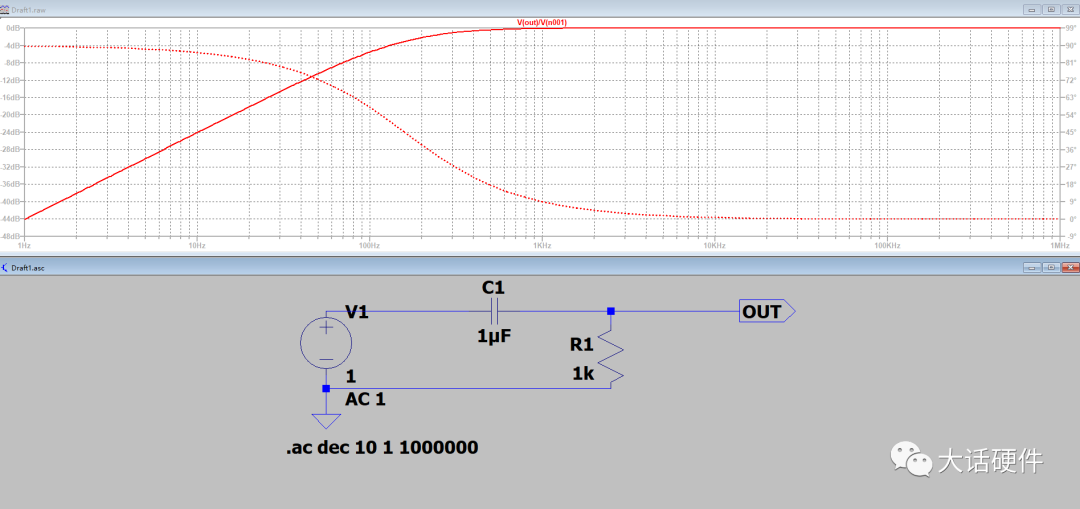
下面這個拓撲就是I型,推導它的傳遞函數

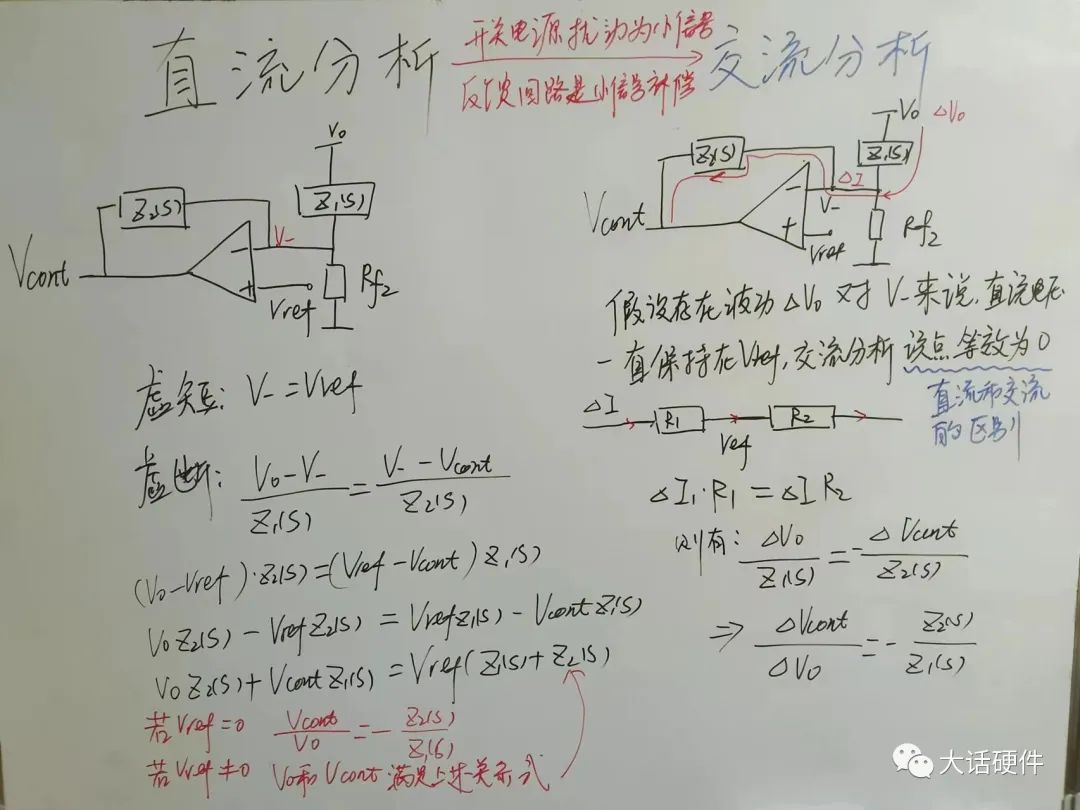
在推導傳遞函數時,需要區分直流和交流分析,直流分析的時候,反相端電壓是Vref,但是進行交流分析的時候,直流電壓等效為0,這個位置我在剛學習的時候,也有些困惑,需要重點理解一下。
所以I型的傳遞函數為:
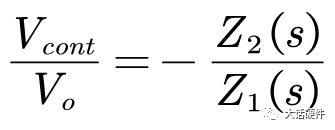
在實際使用的時候,I型的補償網絡在Z2的位置會放置電容,在Z1的位置會放置電阻。
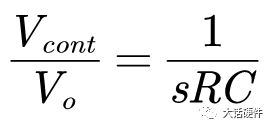
根據零極點的定義,可知I型補償網絡提供了一個零極點,穿越頻率為:
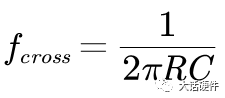
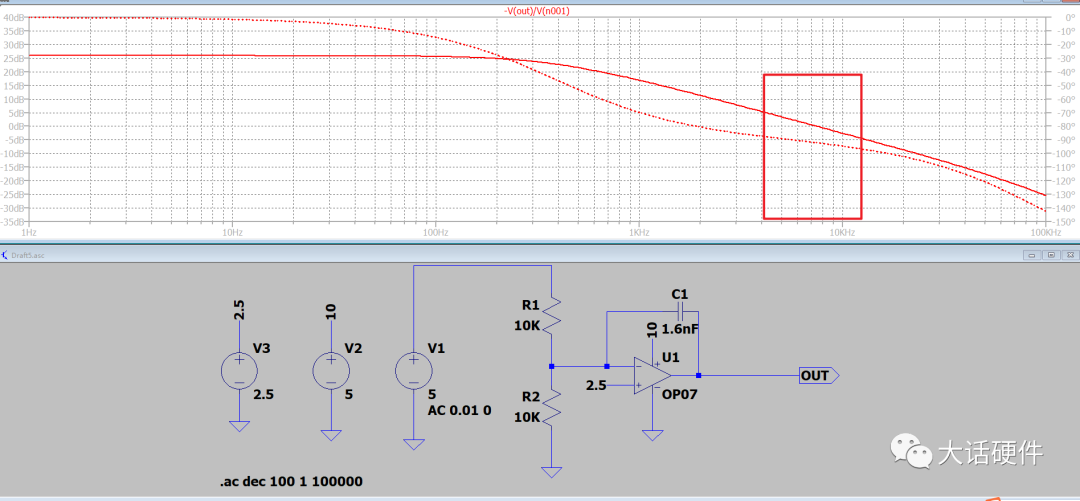
在穿越頻率處提供了-90°的相位,增益以-1的斜率穿過0dB
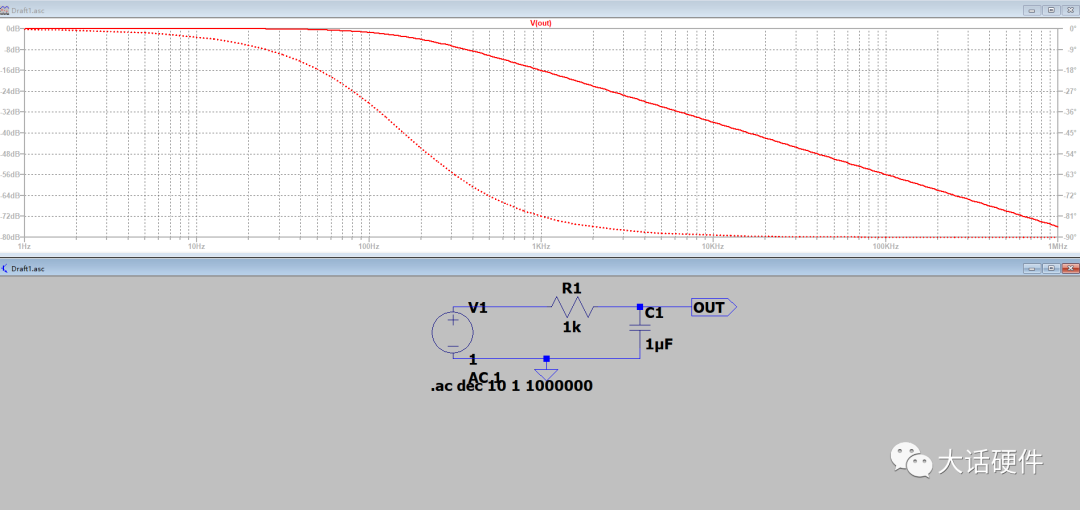
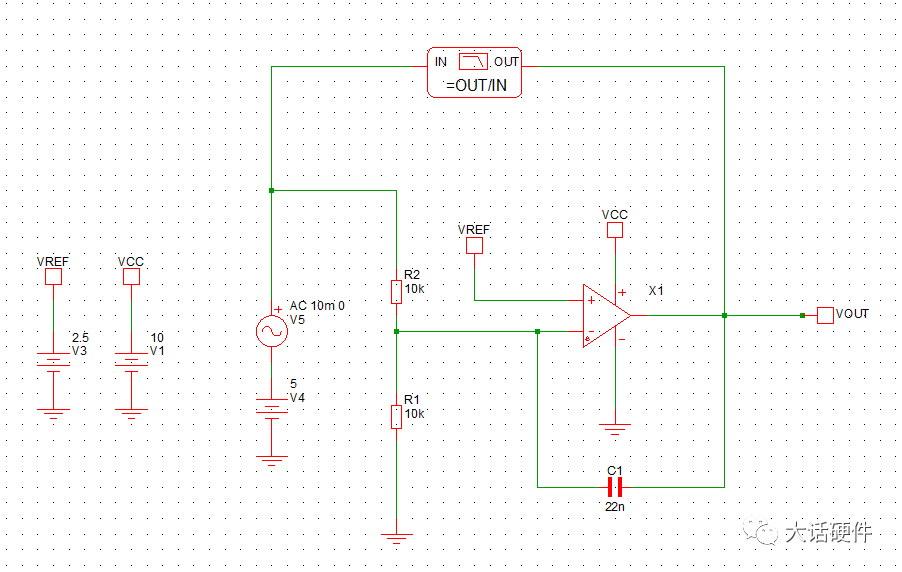
上述仿真的現象和理想中零極點不一樣,考慮是LTspice器件模型非理想,換軟件仿真
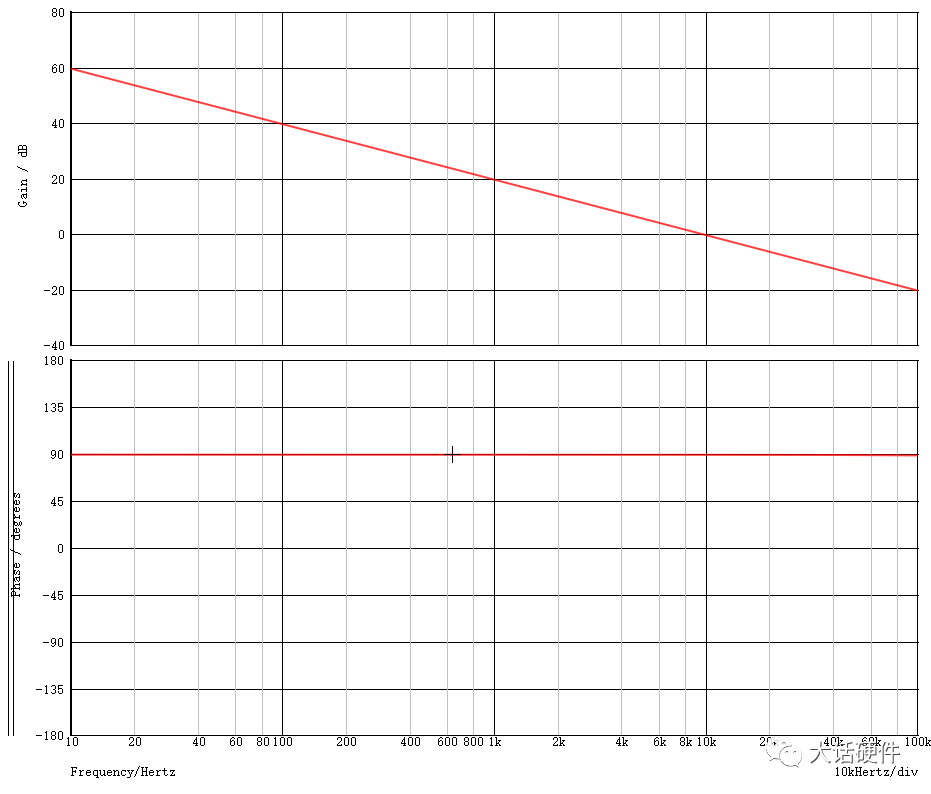
零極點在穿越0dB的時候,斜率-1,相位-90°,這個看起來更符合零極點的波特圖。
II型補償網絡
傳遞函數:

可見II型的補償網絡提供了一個零點,一個零極點,一個極點。
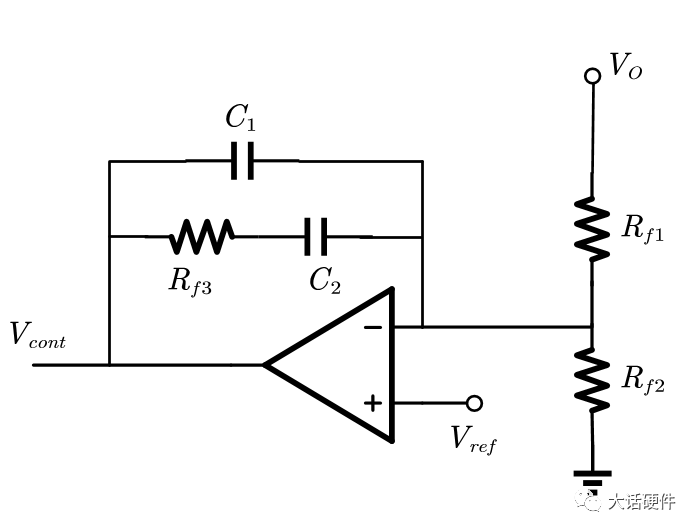
III型補償網絡
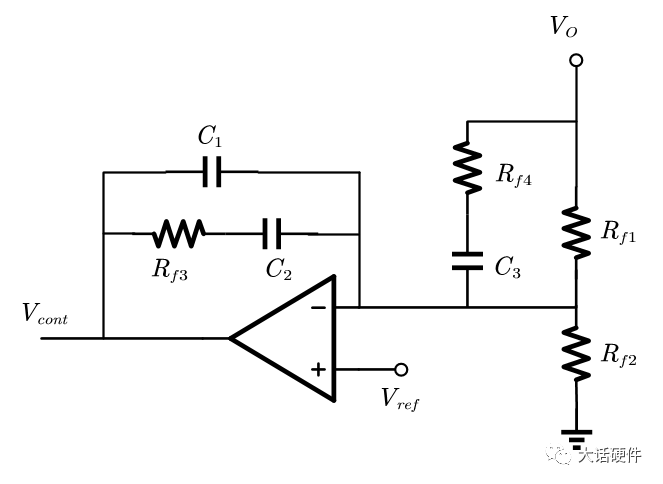

可見III型的補償網絡提供了兩個零點,一個零極點,兩個極點。
以上就是電壓型不同類型的傳遞函數,下一節分析電流型補償網絡的傳遞函數。
目前這些內容在一起可能會讓大家有些不知所措,不要擔心,后面會把前面所有的內容串聯起來,總結出一套環路補償的步驟供大家使用。
-
開關電源
+關注
關注
6448文章
8289瀏覽量
480679 -
傳遞函數
+關注
關注
0文章
102瀏覽量
13928 -
LCR
+關注
關注
0文章
129瀏覽量
20668 -
穩定性分析
+關注
關注
0文章
15瀏覽量
7491 -
環路穩定性
+關注
關注
0文章
21瀏覽量
7396
發布評論請先 登錄
相關推薦
開關電源環路穩定性分析(一)
開關電源環路穩定性分析(三)
開關電源環路穩定性分析(四)
開關電源環路穩定性測量問題
開關電源增益穩定性分析
開關電源環路穩定性分析(二)
開關電源環路穩定性分析(五)
單端反激式開關電源的穩定性分析

多環開關電源系統的穩定性分析
開關電源環路穩定性分析(八)





 工商網監
工商網監
評論