 KUKA機器人DECL 聲明程序和數據列表中的變量和常量V5.9
KUKA機器人DECL 聲明程序和數據列表中的變量和常量V5.9

在程序中使用的變量必須是在聲明中公告的名字和數據類型。簡單的、復雜的和隨意的可定義的數據類型是可用的。聲明首先由關鍵字DECL 開始,跟隨數據類型和變量列表和數組已有的數據類型。當聲明預先確定類型的變量和數組,關鍵字DECL 可被省略。除簡單數據類型INT ,REAL ,CHAR 和BOOL 外,數據類型POS ,EPOS,FRAME ,AXIS,EAXIS etc中都被預先確定。聲明能被數據類型為POS 的變量省略,因為這個數據類型是標準的數據類型而且是默認的分配。關鍵字DECL 可能被用戶定義結構聲明或列舉類型忽略。
數組聲明
就像變量,任何數據類能用于數組。增加數據類型和數組名,數組大小和尺寸必須也被數組公告。尺寸由指定數組大小的數決定。它最大為3。數組的大小出現在方括號中的數組名逗號分隔之后。任何一個數組的大小是無符號的整數。它必須等于或大于1 。
如果數組被作為子程序或函數的參數形式傳送,就像變量一樣它必須被在這個子程序或
函數的定義中公告。數組的大小必須在這個聲明中被忽略但是方括號和逗號決定數組的
尺寸。當調用子程序和函數時,數組的大小時由分配當前的參數轉換決定。.
聲明變量與默認的設置
變量能在數據列表中公告和像默認相同的時間一樣分配最初的值。聲明語句包含的默認設置不能在程序和函數的聲明部分使用。
在簡單數據變量的情況下,最初的值作為簡單的常量指定。通過結構變量,最初的值是一個集合。
聲明語句在開始時給變量分配默認的設置,就像簡單的聲明由關鍵字DECL 分配變量名和數據類型以默認設置。
“ =” 符號和最初的值以常量的形式跟隨變量名。當聲明默認的設置,你不能在聲明語句中列出多個變量。一個單獨的聲明語句是任何一個變量被分配默認設置的所必須的。當分配默認設置時,關鍵字DECL 可被忽略。
“=”符號右面的常量數據類型必須與左面指定的數據類型兼容但是并不必須完全一致。
如果數據類型兼容,系統自動作為常量匹配它們。
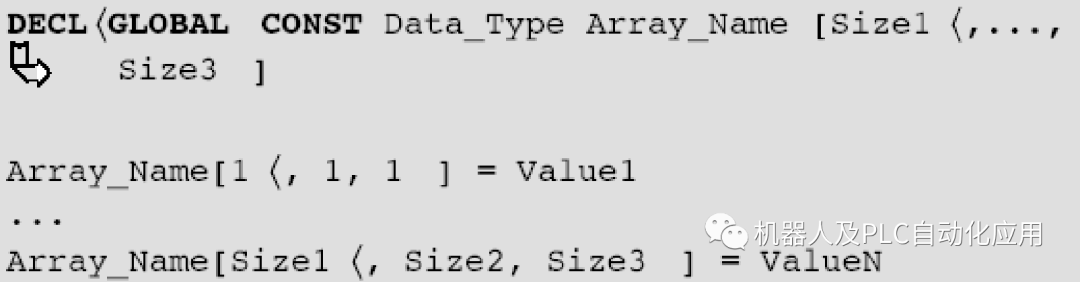
聲明數組與默認設置
聲明語句包含的默認設置不能在程序和功能的聲明部分使用。也不能在數據列表聲明和初始化中單個排列。
當在數組中聲明默認設置,獨立的語句必須寫入任何一個數組元素。
數組默認設置的聲明最少包含兩塊:
第一塊包含由DECL. 聲明的標準數組聲明。
第二塊包含數組元素的說明并通過“=”號和數組元素的初始值跟隨。
在默認設置中更多的這個類型塊被分配可跟隨的其他數組元素。
當分配比數組元素更多的默認設置,元素必須在升序排列的數組索引中被指定。
“=”符號右面的常量數據類型必須與左面指定的數據類型兼容但是并不必須完全一致。如果數據類型兼容,系統自動作為常量匹配它們。
作為默認分配字符行
如果你想默認分配相同的字符串作為數組元素的類型字符行,你不是必須單獨的分配它的每一個數組元素。數組索引的有指針可被省略,而且常量字符串作為默認設置分配到一個完整的行。
變量數據類型“Freely ” 聲明可定義為結構類型或列舉類型。
如果之后數據類型名不是預先確定的系統數據類型,關鍵字DECL必須在這里被編程。數據類型定義STRUC和ENUM 必須總是在DECL聲明的這個類型變量之后。
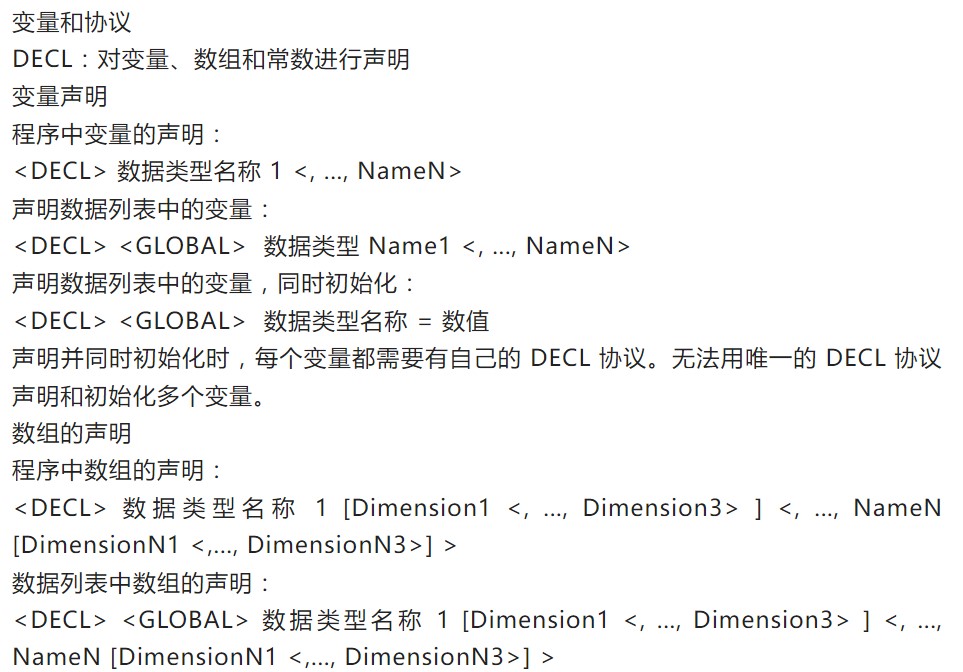
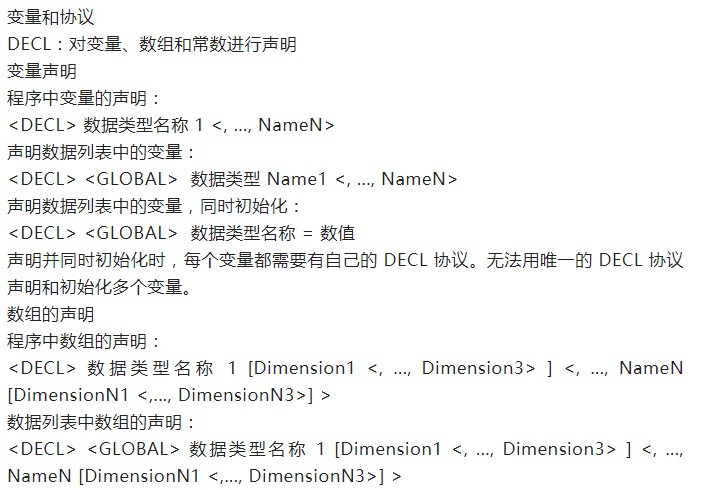
聲明程序中的變量:

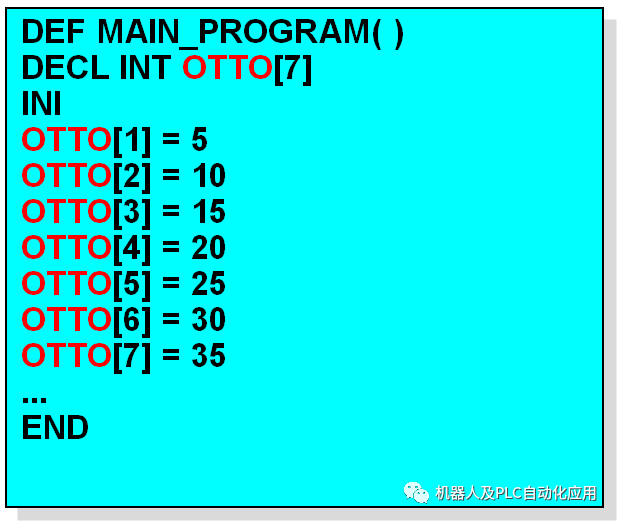
聲明程序中的數組 :

聲明數據列表中的變量:

或者同時分配值:

聲明數據列表中的數組:

聲明和初始化數據列表中的常量:

聲明和初始化數據列表中的數組:
范例:
聲明沒有初始化。
DECL POS P1
;關鍵字DECL可被省略
INT A1,A2
REAL VEL[7],ACC[7],B
DECL S_PAR_TYPE S_PAR[3]
由默認設置聲明數組( 只在數據列表中).
INT A[7] ;數組的7 個整數值
A[1]=27 ;第一個數組元素被分配為27
A[2]=313
A[6]=11
CHAR TEXT1[80]
TEXT1[ ]=”Message Text”
CHAR TEXT2[2,80]
TEXT2[1,]=”First Message Text”
TEXT2[2,]=”Second Message Text”
聲明變量的初始化( 只在數據列表中).
FRAME F1={X 123.4, Y -56.7, Z 89.56}
審核編輯 :李倩
-
機器人
+關注
關注
210文章
27839瀏覽量
204605 -
變量
+關注
關注
0文章
607瀏覽量
28257 -
數據類型
+關注
關注
0文章
236瀏覽量
13567
原文標題:KUKA 機器人DECL 聲明程序和數據列表中的變量和常量V5.9
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
KUKA機器人問題解答
庫卡KUKA機器人四種啟動方式介紹
KUKA焊接機器人伺服電機常見故障及維修處理
庫卡機器人MGV電源模塊維修
KUKA機器人如何聲明變量
KUKA機器人 RESUME:中止中斷程序解讀
KUKA機器人-結構化機器人程序V5.9








 工商網監
工商網監
評論