") 哈工大團隊在足式機器人智能領域取得重要研究成果
哈工大團隊在足式機器人智能領域取得重要研究成果
近日,哈爾濱工業(yè)大學機電學院高海波教授團隊在野外足式機器人環(huán)境認知學習與自主導航方面取得重要進展,相關研究成果(Learning physical characteristics like animals for legged robots)作為封面論文發(fā)表于綜合類頂級期刊《國家科學評論》(National Science Review,NSR)。
足式機器人在非結構化環(huán)境下具有靈活的運動性能和良好的地形適應能力,然而野外環(huán)境復雜多變,泥沙、冰雪、積水等非幾何障礙限制了它們的實際應用。面對具有不同物理特性的非幾何障礙,通過自主規(guī)劃提前規(guī)避或通過智能控制主動適應是有效的處理方法。因此,如何提前感知地形的物理特征信息,如軟硬程度和摩擦系數(shù),變得尤為重要。
動物可以通過對物理特征的理解去適應不斷變化的地形環(huán)境,為足式機器人的環(huán)境認知學習提供了仿生學啟示。從如下視頻中可以發(fā)現(xiàn),小貓在危險區(qū)域行走時會用腳輕輕地試觸地形,估計地面的承壓和附著能力;在后續(xù)行走過程中,小貓根據(jù)先前積累的經驗對具有相似視覺特征的地形進行預估,并避開非幾何危險區(qū)域。然而,機器人實現(xiàn)類似的認知行為卻面臨諸多挑戰(zhàn):如何通過視覺和觸覺信息實現(xiàn)對地形物理特征的有效表征?如何通過對圖像數(shù)據(jù)和模型參數(shù)的聚類與映射匹配實現(xiàn)環(huán)境認知?如何解決由于地面環(huán)境動態(tài)變化造成的認知沖突?


針對上述問題,研究團隊提出了一種足式機器人的環(huán)境物理特征類動物學習方法。研究人員以法向/切向足地作用力學模型為基礎,設計了基于模型-數(shù)據(jù)的無監(jiān)督學習框架。該研究首次提出了具有認知沖突解決能力的增量式在線學習方法,使得機器人能夠通過視-觸覺融合感知自主識別環(huán)境物理特征信息。具體而言,在地面表征方面,簡化并統(tǒng)一了不同足與地面的接觸力學模型,提供了表征地面觸覺特征的物理參數(shù);機器人快速采集周圍圖像,采用SLIC簡單線性迭代聚類方法建立數(shù)據(jù)集,并通過對比學習無監(jiān)督地建立視覺特征提取器。在環(huán)境認知方面,采用E-SOINN增強自組織增量神經網絡對視覺和觸覺特征進行無監(jiān)督聚類,將數(shù)據(jù)特征總結為知識形式,并構建認知映射層,將不同模態(tài)知識進行匹配映射。為了解決認知沖突,采用單個尖峰神經網絡連接不同模態(tài)知識,更改LIF帶泄漏整合發(fā)放模型對連接強度進行調節(jié),機器人可以通過離散接觸經驗調整視覺和觸覺的映射強度,實現(xiàn)動態(tài)更新和知識遺忘。
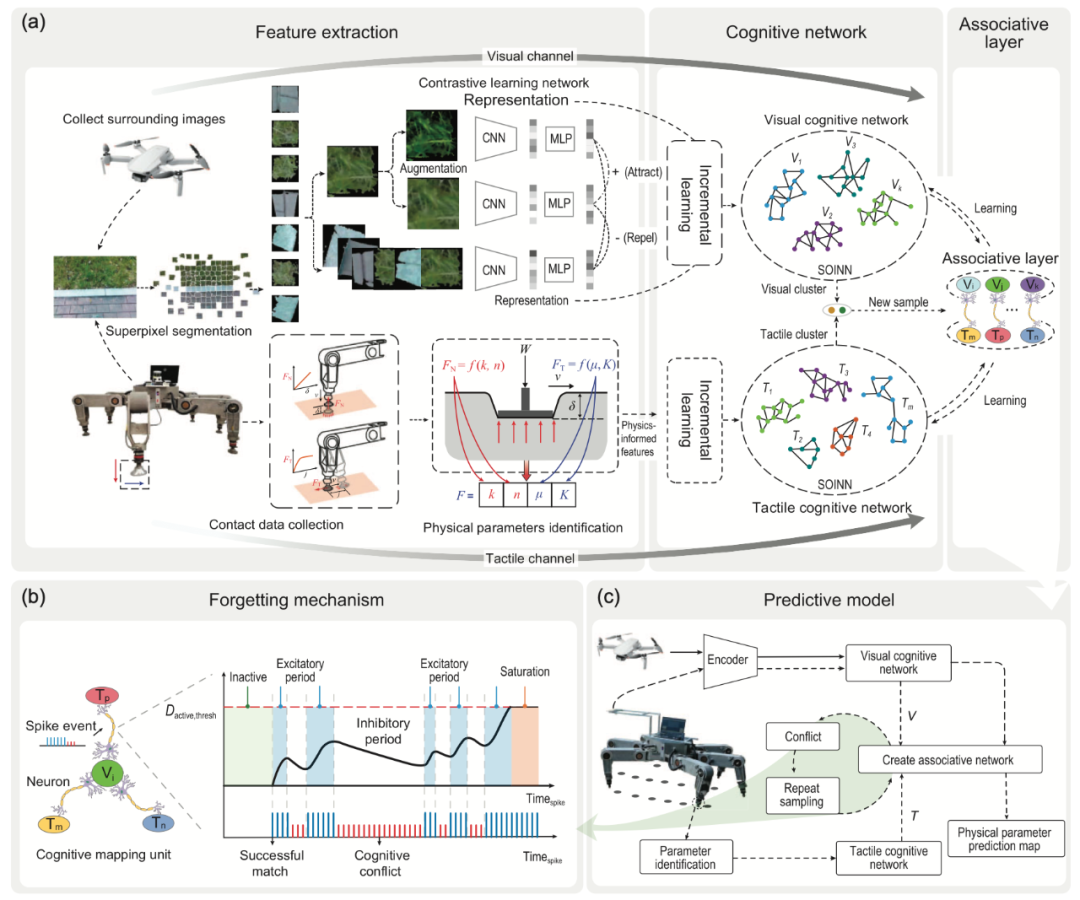
足式機器人環(huán)境物理特征學習框架
研究團隊開展了豐富的室內外感知和導航試驗,證明該方法可以有效助力機器人實現(xiàn)地面物理特征感知與預測,并在動態(tài)環(huán)境中學習和調整其認知模型,最終安全執(zhí)行復雜的導航避障任務。相關成果可用于足式等復雜環(huán)境移動機器人的自主星球探測、野外救援等任務,并提供了一種物理智能系統(tǒng)的典型案例。
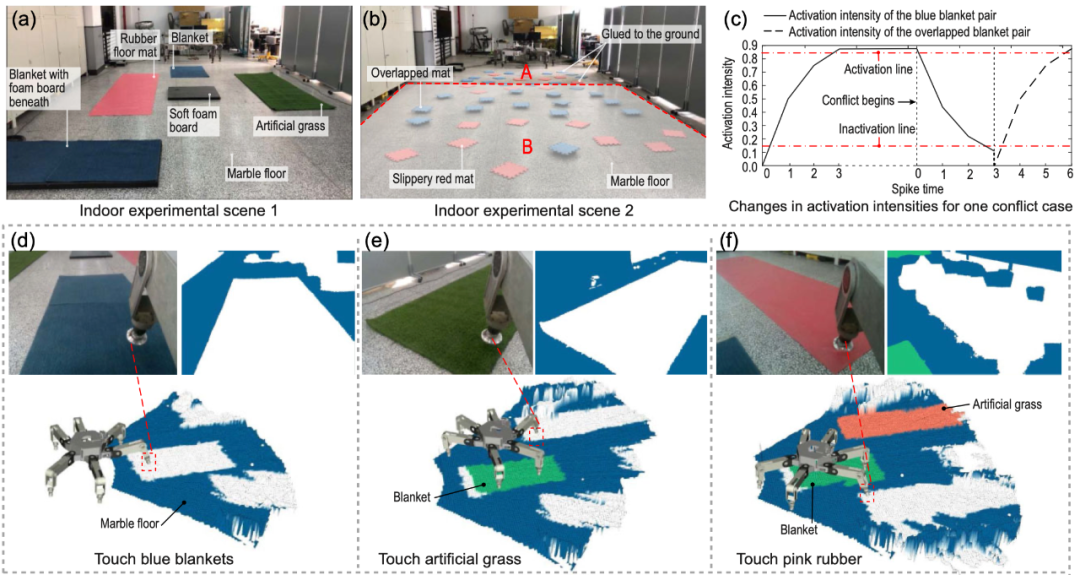
六足機器人室內實驗
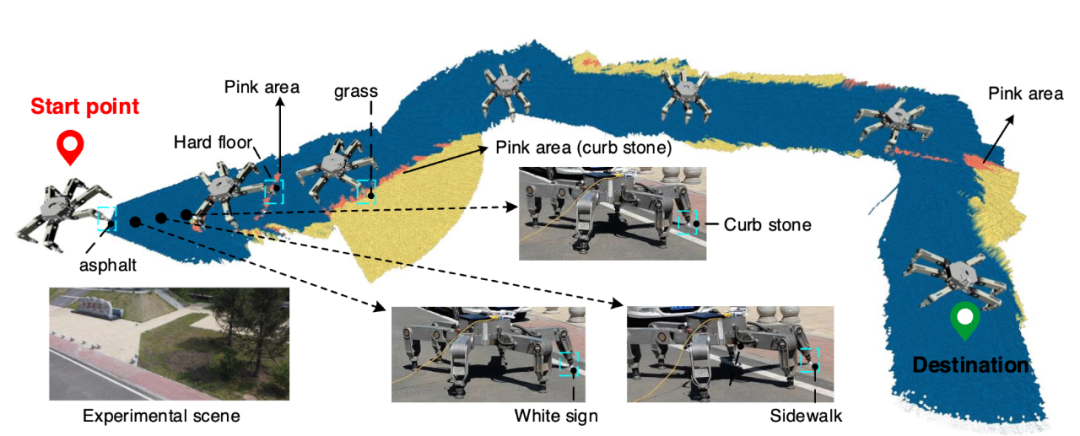

六足機器人野外實驗
該項研究獲得了國家重點研發(fā)計劃(2019YFB1309500)、國家自然科學基金(91948202,51822502)等資助。哈工大為第一署名單位,丁亮教授為論文通訊作者,博士研究生徐鵬、丁亮教授為論文共同第一作者。哈工大鄧宗全院士,高海波教授,機電學院楊懷廣副教授,英國利茲大學黃艷龍教授,機電學院碩士研究生李政洋、王志愷(已畢業(yè)),博士研究生周如意、蘇楊等參與相關研究。
審核編輯 :李倩
-
機器人
+關注
關注
210文章
28212瀏覽量
206551 -
模型
+關注
關注
1文章
3174瀏覽量
48716 -
數(shù)據(jù)集
+關注
關注
4文章
1205瀏覽量
24644
原文標題:哈工大團隊在足式機器人智能領域取得重要研究成果 | NSR封面
文章出處:【微信號:tjrobot,微信公眾號:天津機器人】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
相關推薦
【書籍評測活動NO.51】具身智能機器人系統(tǒng) | 了解AI的下一個浪潮!
醫(yī)療機器人有哪些_醫(yī)療機器人有哪些應用
北京大學研究團隊在新型激光領域取得重要進展
工控一體機在智能機器人領域應用的優(yōu)勢與市場展望

武漢理工大學在水系鋅離子電池研究方面取得新進展
AMD贊助多支FIRST機器人競賽團隊
在NVIDIA Isaac Lab中訓練四足機器人運動

華工科技聯(lián)合哈工大實現(xiàn)國內首臺激光智能除草機器人落地
開啟全新AI時代 智能嵌入式系統(tǒng)快速發(fā)展——“第六屆國產嵌入式操作系統(tǒng)技術與產業(yè)發(fā)展論壇”圓滿結束
海康機器人推出全新一代潛伏叉取式機器人
u-blox在機器人割草機領域取得重要項目
深開鴻與哈工大重慶研究院合作共同開啟智能機器人與協(xié)同技術的新篇章

深開鴻與哈工大重慶研究院攜手打造智能機器人與協(xié)同技術新篇章






 工商網監(jiān)
工商網監(jiān)
評論