") 特斯拉電子電氣架構(gòu)路線圖
特斯拉電子電氣架構(gòu)路線圖
01
智能化發(fā)展路徑
特斯拉自研汽車智能化的大部分關(guān)鍵軟硬件,國內(nèi)三家造車新勢力跟緊步伐,逐步針對核心硬軟件開始自研之路
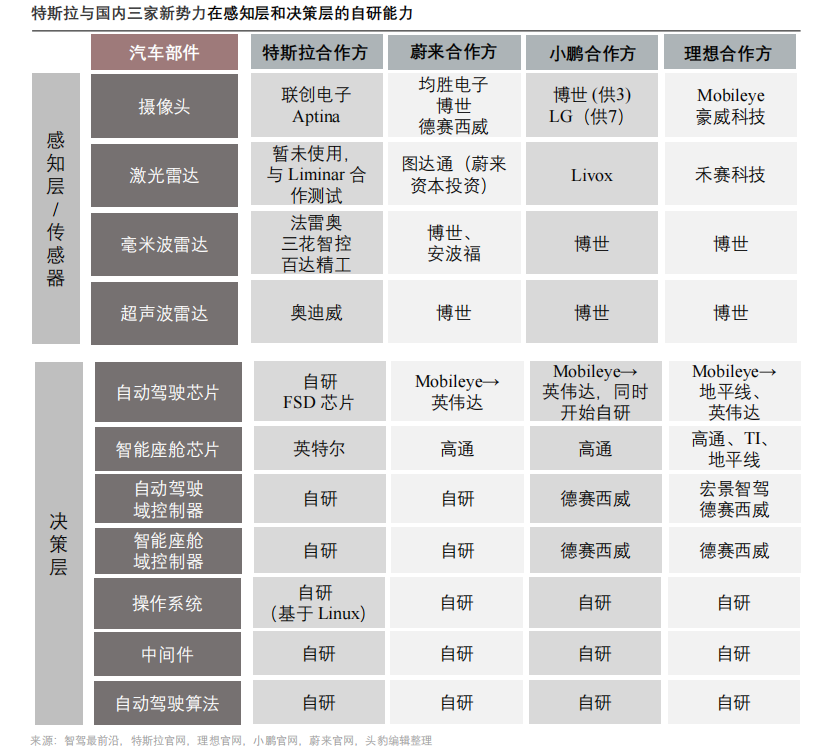
特斯拉與國內(nèi)三家造車新勢力的自研能力對比
在傳感器方面,特斯拉與Liminar合作研發(fā)激光雷達,而國內(nèi)三家新勢力則購買合作方產(chǎn)品;在毫米波雷達和超聲波雷達供應上,蔚小理主要使用博世的產(chǎn)品。在決策層方面,特斯拉自研自動駕駛芯片、域控制器、中間件、操作系統(tǒng),并全面覆蓋軟件應用。蔚小理從選擇Mobileye的自動駕駛芯片到選擇英偉達的芯片,并開啟了中間件和操作系統(tǒng)的自研道路。
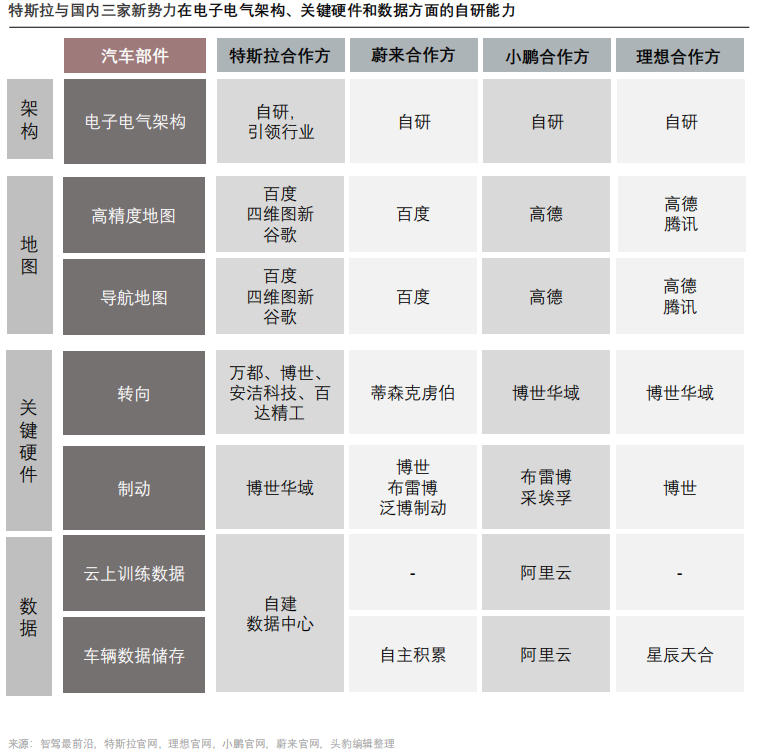
特斯拉及蔚小理選擇自研電子電氣架構(gòu),目前特斯拉已研發(fā)出域集中式E/E架構(gòu)并引領(lǐng)行業(yè)變革。四家車企在選擇與百度、高德、谷歌、騰訊等地圖企業(yè)合作而非自研。在轉(zhuǎn)向和制動系統(tǒng)方面,博世和布雷博的產(chǎn)品頗受青睞。特斯拉自建數(shù)據(jù)中心訓練數(shù)據(jù)引擎,蔚小理則選擇與阿里云、星辰天合等公司進行合作。
02
電子電氣架構(gòu)
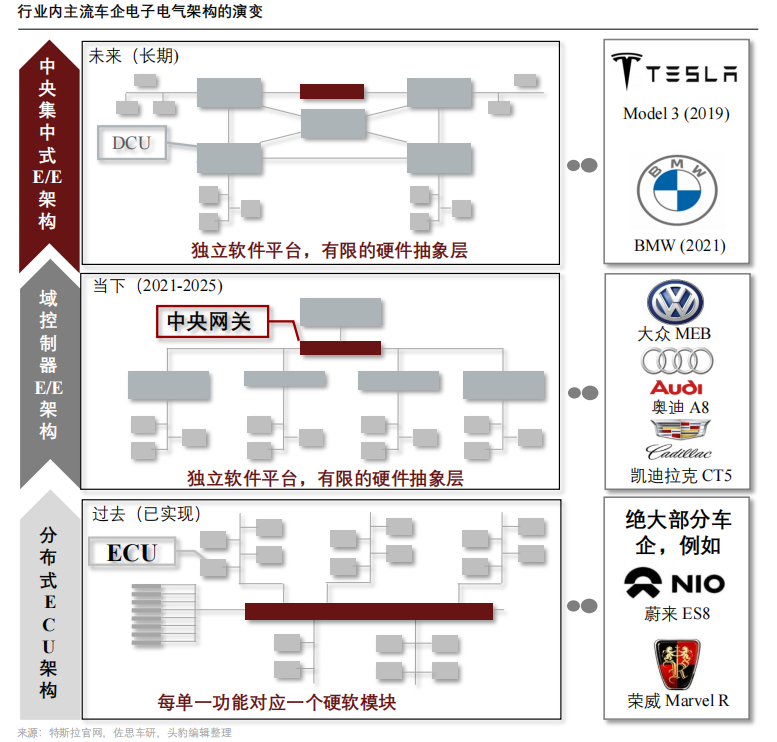
從Model S到Model 3,特斯拉電子電氣架構(gòu)發(fā)生了從分布式功能的域控制器到中央集中式的重要變化,ECU數(shù)量也隨之減少
特斯拉的電子電氣架構(gòu)
目前傳統(tǒng)車企仍以分布式架構(gòu)為主,特斯拉的電子電氣架構(gòu)較為領(lǐng)先且在不斷進步深化,特斯拉中央集中式的電子電氣架構(gòu)是其實現(xiàn)軟件定義汽車的基礎(chǔ)。
03
座艙域控制器
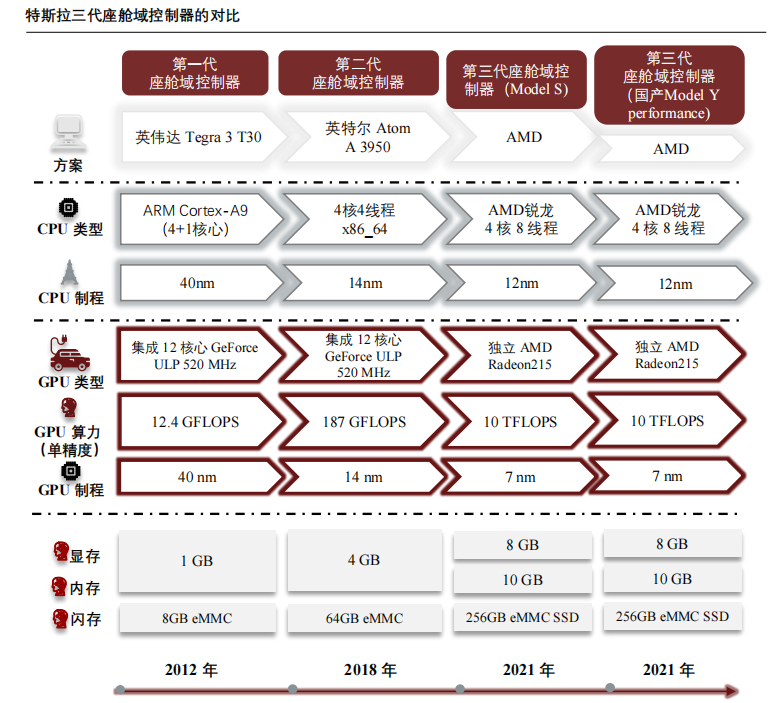
特斯拉Model S和高性能版Model Y搭載第三代座艙域控制器, 采用AMD銳龍處理器,打造最流暢順滑的車機體驗
特斯拉的三代座艙域控制器
特斯拉前兩代座艙域控制器的主計算芯片分別為英偉達Tegra 3 T30和英特爾車規(guī)級處理器Atom A 3950,閃存使用的是讀寫相對較慢的eMMC,因此車機系統(tǒng)運行緩慢。第三代座艙域 控制器采用AMD銳龍嵌入式處理器,將eMMC換成SSD,內(nèi)閃的讀寫性能和壽命明顯增加;因此,在車機實際體驗中,應用程序打開、網(wǎng)頁載入速度明顯變快、游戲也能更流暢運行。
04
自動駕駛純視覺方案
特斯拉的自動駕駛架構(gòu)是基于純視覺方案,采用原始數(shù)據(jù)通過神經(jīng)網(wǎng)絡構(gòu)建真實世界的三維向量空間,實現(xiàn)汽車的路徑規(guī)劃
特斯拉的自動駕駛純視覺方案
自動駕駛方面,區(qū)別于國內(nèi)車企的“視覺+激光雷達”方案,特斯拉采用純視覺方案。純視覺方 案共配有環(huán)繞車身的8個攝像頭,視野范圍可達360度,對周圍環(huán)境最遠監(jiān)測距離達250米;還配置12個超聲波傳感器和1個毫米波雷達來探測物體,與視覺系統(tǒng)相配合實現(xiàn)泊車引導。

05
自動駕駛芯片
特斯拉當前采用以NPU為核心的主控芯片,外采Aptina攝像頭的自動駕駛方案,得益于充沛資金,公司開啟核心自研模式
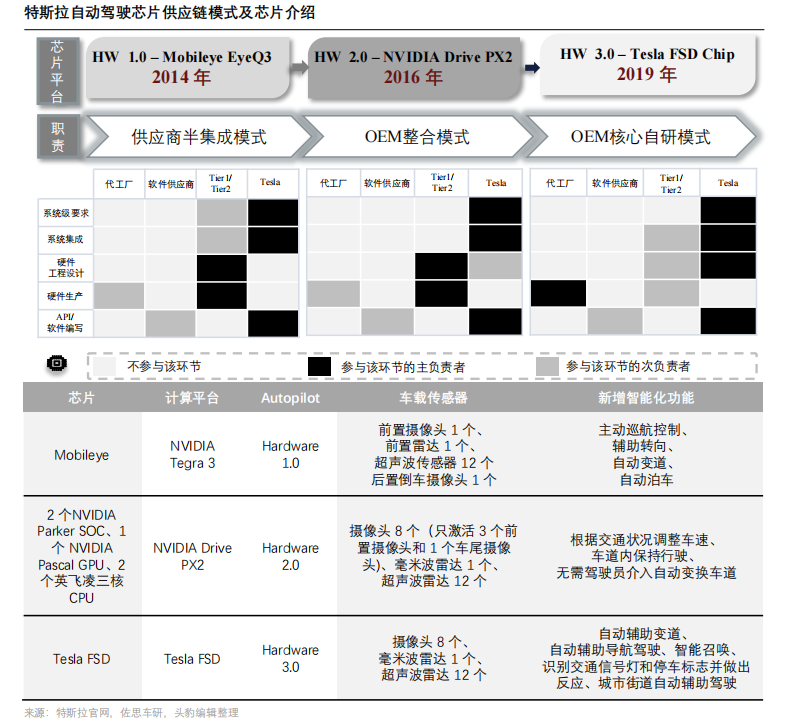
特斯拉自動駕駛芯片供應鏈模式及芯片介紹
2014年起,特斯拉歷經(jīng)外購主控芯片到核心自研的發(fā)展歷程。2014~2016 年,特斯拉配備的是基于Mobileye Eye Q3芯片的AutoPilot HW1.0計算平臺;2016~2019年,基于英偉達DRIVE PX 2 AI計算平臺打造Hardware 2.0;2017年,起特斯拉開啟自研主控芯片;2019年, AutoPilot HW3.0平臺搭載Tesla FSD自研版本的主控芯片。
06
OTA技術(shù)
特斯拉率先在汽車上應用OTA升級,汽車軟件能像智能手機實現(xiàn)在線升級,實現(xiàn)智能座艙、智能駕駛、轉(zhuǎn)向控制的功能更新
特斯拉的OTA技術(shù)
特斯拉早期的Model S和最新的Model 3均具備整車OTA 能力,從而通過云端實現(xiàn)動力系統(tǒng)域、座艙娛樂域、車身電子域、底盤和自動駕駛域的升級。

07
影子模式
特斯拉通過影子模式采集和觸發(fā)新的Corner case數(shù)據(jù),快速鍛煉和修正自動駕駛神經(jīng)網(wǎng)絡模型,構(gòu)建自動駕駛技術(shù)競爭壁壘
特斯拉的影子模式
特斯拉借助量產(chǎn)車隊的擴張,建立數(shù)據(jù)閉環(huán),通過數(shù)據(jù)引擎充分將數(shù)據(jù)流轉(zhuǎn)化迭代驅(qū)動力,實現(xiàn)自動駕駛技術(shù)的迭代進步。每一款特斯拉量產(chǎn)車都配備有影子模式,負責在用戶駕駛過程中采集各類駕駛數(shù)據(jù),其中包括高價值的corner case數(shù)據(jù)。數(shù)據(jù)引擎將高價值數(shù)據(jù)送往自動標注系統(tǒng)從而快速生成真值,用以迭代神經(jīng)網(wǎng)絡模型,實現(xiàn)自動駕駛技術(shù)的自我演進。

審核編輯 :李倩
-
控制器
+關(guān)注
關(guān)注
112文章
16214瀏覽量
177479 -
特斯拉
+關(guān)注
關(guān)注
66文章
6295瀏覽量
126477 -
自動駕駛
+關(guān)注
關(guān)注
783文章
13694瀏覽量
166166
原文標題:特斯拉電子電氣架構(gòu)路線圖
文章出處:【微信號:智能汽車電子與軟件,微信公眾號:智能汽車電子與軟件】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論