 基于AT89C51單片機的變頻調速控制系統設計
基于AT89C51單片機的變頻調速控制系統設計
1.概述
在電氣傳動領域中,隨著自關斷器件技術水平的不斷提高,脈寬調制技術(簡稱PWM技術)也日趨成熟。PMW交流變頻調速以其高效率、高功率因數、輸出波形好、結構簡單等優點,在井下風機、水泵、造紙機等設備中得到了廣泛的應用。將單片機應用于交流變頻調速系統,可有效地避免傳統調速方案中的一些缺點,達到了提高控制精度的目的,其特點:
(1)采用單片機可以使絕大多數控制邏輯通過軟件實現,簡化了電路。
(2)單片機具有更強的邏輯功能,運算速度快,精度高,有大容量的存儲單元,可以實現較為復雜的控制。
(3)無零點漂移,控制精度高。
(4)可以提供人機界面,多機連網工作。
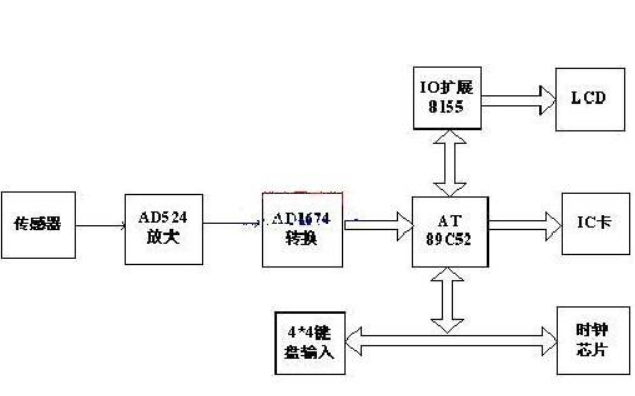
根據國內外有關變頻調速的最新研究成果及研究動向,參閱大量的文獻、資料,本著先進性與成熟性兼顧、標準化、可靠性、連續性、及時性的系統設計原則,設計了如圖1所示的系統結構框圖。
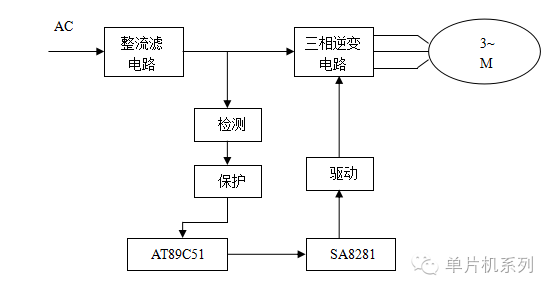
圖1 系統結構框圖
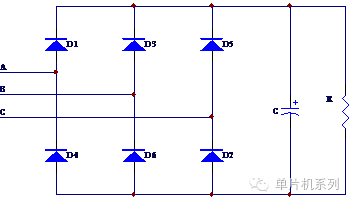
圖2 整流電路
整個電路分為三大部分:主回路、驅動電路以及用單片機控制PWM產生器的控制電路,另外還有過流檢測和保護電路,這樣使得系統工作更穩定、可靠。
2.系統主回路設計
2.1整流濾波電路的設計
為了給逆變器提供一個穩定的直流電壓,需要將電網輸入的交流電進行整流。通常整流電路可分為可控整流和不可控整流。可控整流可以使系統的功率因數接近l,并且具有較小的紋波,頻率高,可降低較小幅值的濾波電容。但是采用可控整流電路會使得系統成本上升,并且控制電路復雜。
目前比較經濟可靠的方案,一般都是采用二極管整流,使電網功率因數與逆變輸出電壓無關而接近于1。在本系統中,我們采用了三相二極管不可控整流,如圖2所示,采用它無需控制電路驅動,電路簡單、可靠,成本低,缺點就是紋波較大,需采用較大幅值的濾波電容。
2.2 三相逆變電路的設計
三相交流負載需要三相逆變器,在三相逆變電路中,應用最廣的是三相橋式逆變電路。采用IGBT作為可控元件的電壓型三相逆變電路如圖3所示,可以看出電路由三個半橋組成。

圖3 三相逆變電路

圖4 IR2110驅動半橋電路
電壓型三相逆變橋的基本工作方式與單相逆變橋相同,是 導電方式,即每個橋臂的導電角度為 ,同一相(同一半橋)上下兩個臂交替導電,各相開始導電的時間依次相差 。這樣,在任一瞬間,將有三個橋臂同時導通。可能是上面一個臂,下面兩個臂,也可能是上面兩個臂下面一個臂同時導通。因為每次換流都是在同一相上下兩個橋臂之間進行的,因此,也被稱為縱向換流。用T記為周期,只要注重三相之間互隔T/3(T是周期)就可以了,即B相比A相滯后T/3,C相又比B相滯后T/3。
具體的導通順序如下:
第1個T/6:V1,V6,V5導通,V4,V3,V2截至;第2個T/6:Vl,V6,V2導通,V4,V3,V5截至;
第3個T/6:V1,V3,V2導通,V4,V6,V5截至;第4個T/6:V4,V3,V2導通,V1,V6,V5截至;
第5個T/6:V4,V3,V5導通,V1,V6,V2截至;第6個T/6:V4,V6,V5導通,V1,V3,V2截至。
3 驅動電路及系統保護電路的設計
3.1 驅動電路的設計
作為功率開關器件,IGBT的工作狀態直接關系到整機的性能,所以選擇或設計合理的驅動電路顯得尤為重要。采用一個性能良好的驅動電路,可使IGBT工作在比較理想的開關狀態,縮短開關時間,減小開關損耗,對提高整個裝置的運行效率,可靠性和安全性都有重要的意義。
驅動電路必須具備兩個功能:一是實現控制電路與被驅動IGBT柵極的電隔離;二是提供合適的柵極驅動脈沖[ 3]。
對驅動電路的要求,可歸納如下:
1)IGBT和MOSFET都是電壓驅動,都具有一個2.5~5V值電壓,有一個容性輸入阻抗,因此IGBT對柵極電荷非常敏感,故驅動電路必須很可靠,要保證有一條低阻抗值的放電回路,即驅動電路與IGBT的連線要盡量短。
2)用內阻小的驅動源對柵極電容充放電,以保證柵極控制電壓Uge,有足夠陡的前后沿,使IGBT的開關損耗盡量小。另外,IGBT開通后,柵極驅動源應能提供足夠的功率,使IGBT不退出飽和而損壞。
3)驅動電路要能傳遞幾十kHz的脈沖信號。
4)在大電感負載下,IGBT的開關時間不能太短,以限制出di/dt形成的尖峰電壓,確保IGBT的安全。
5)IGBT的柵極驅動電路應盡可能簡單實用,最好自身帶有對IGBT的保護功能,有較強的抗干擾能力。
本文采用美國IR公司推出的IR21lO集成驅動器來驅動IGBT,它兼有體積小,速度快,電路簡單的優點,是中小功率變換裝置中驅動器件的首選品種。
驅動芯片IR2110用于驅動半橋電路如圖4所示。
**3.2 電流檢測及過流保護電路**
當流過IGBT的電流過流,一旦超出安全區,IGBT將永久損壞,因此系統要設置電流過流保護電路,系統在變頻器的直流部分串電流互感器將電流轉換為電壓信號再通過比較器比較,將過流信號檢測出來后,送到SA828l的脈沖封鎖端(電平信號),那么SA828l就會停止輸出PWM脈沖,以保護IGBT。IGBT的過電流保護電路如圖5所示。

圖5****IGBT的電流保護電路
其中運放C814組成電壓跟隨器,其輸入來自電流互感器的輸出。兩個電壓比較器C271組成窗口電壓比較器,比較器的輸出經施密特反相器連接到與門的輸入端。當IGBT沒有過電流時,C814的輸入電壓比較低,窗口電壓比較器輸出高電平,因此EN信號為高電平,使IGBT驅動信號有效;反之,當IGBT過電流時,EN信號變為低電平,封鎖了IGBT驅動信號而使IGBT關斷,調節電位器RP,可以改變過流閥值的大小。
過壓保護電路的原理與電流保護電路類似,另外在主電路上應配裝一個10A的快速熔斷保險,當電路發生嚴重過流時,快速熔斷保險燒斷切斷電網電源,盡可能的保證主電路的安全。
4.控制電路軟硬件設計
三相SPWM發生器是控制電路的核心部分。在本設計中,我們選用了AT89C51單片機控制英國MITEL公司的專用集成芯片SA8281作為SPWM波形發生器,該芯片與微處理器接口方便,幾乎不用加任何的邏輯電路即可構成完整的SPWM控制電路,結構緊湊,提高了系統的集成度和可靠性,利于降低成本。
4.1 SA8281的功能介紹
SA8281芯片是MITEL公司設計的專門為交流電機的調速控制,UPS電源以及其他需要脈寬調制作為一種有效電源控制的電力電子器件[4]。
它可用于三相PWM波形產生的可編程微機外圍接口芯片,使用一組標準的MOTEL總線,適用于英特爾和摩托羅拉二種總線接口,接口通用性好,編程和操作簡單,方便,快捷。
SA8281采用常用的對稱的雙邊緣采樣法產生全數字化PWM波形,無時漂,無溫漂,具有很高的精度和溫度穩定性。
有6個標準的TTL電平輸出,用來驅動逆變器的6個功率開關器件。
工作頻率范圍寬,精度高,三角載波頻率可調。
工作方式靈活,在電路不變的情況下,直接通過軟件設定載波頻率、調制頻率、調制比、最小脈寬、死區時間等工作參數就可改變逆變器的性能指標,驅動不同負載或工作于不同工況。可通過改變輸出SPWM脈沖的相序實現電機的正反轉,通過調制達到輸出頻率為OHz而給電機繞組通一直流電,實現電機的“直流插入制動”。
獨立閉鎖端可瞬時閉鎖輸出SPWM脈沖,可處理電機突發情況的發生。
波形存儲在內部ROM中,可以選擇可刪除的最小脈寬和死區時間。
4.2 控制硬件電路的實現
控制電路部分采用的單片機為ATMEL公司推出的AT89C51,它采用CMOS結構,耗能低,抗干擾能力強,與MCS一5l系列完全兼容,且功能比一般的51系列芯片要強大許多。其內部含有128字節的RAM和4K字節的EPROM完全滿足系統需要,不用外加RAM或EPROM存放數據或程序,但需要設定和保存的參數則存放在一片EEPROM中[ 5]。
正弦波發生器的原理圖如圖7所示,它以SA828l作為三相正弦波的發生芯片,單片機AT89C51作為SA8281的控制芯片。SA828l將大部分外圍電路都集成在芯片內部,可以看出SA8281與微處理器接口簡單,控制電路非常簡單,結構緊湊,這樣做從另一方面來講對芯片工作的穩定性有很大幫助,提高了可靠性。
從整個電路來說,實現對SA828l的控制是通過按鍵輸入相應的信息。本電路的設計要對SA8281輸入初始化參數和控制參數,所以用到了三個按鍵0#鍵、1#鍵和2#鍵。在主程序中判定鍵號用的是查詢式,0#鍵按下轉入初始化子程序:l#鍵按下轉入加速子程序:2#鍵按下轉入減速子程序。
AT89C51是地址與數據總線復用類的單片機,為了隔離潛在的噪音干擾,設置輸出斷開引腳SETTRIP在通常情況下接地,同時設置了開關,便于在緊急情況下迅速關斷所有PWM輸出;為使PWM輸出處于有效狀態,輸出關斷引腳 接高電平[ 6]。外部時鐘CLK引腳接獨立的12M有源晶振為SA8281芯片提供一時鐘基準用于控制與PWM有關的各時序。
4.3控制電路軟件設計
對SA8281芯片的控制是通過微處理器接口將相應的參數送入芯片內部兩24位的寄存器R4、R3來實現的,它們是初始化寄存器和控制寄存器。數據先被讀入一系列臨時寄存器R0~R2中,然后通過一條虛擬的寫操作將數據傳送至相應的R4,R3寄存器。
初始化寄存器用于設定和電機及逆變器有關的一些基本參數。在正常情況下,這些參數在電機工作前就被初始化(例.在PWM輸出答應前),并且在電機工作時一般不答應改變。
控制寄存器在工作過程中控制輸出脈寬調制波的狀態,從而進一步控制電機的運行,比如轉速、正/反轉、啟動和停止等。通常在電機工作時該寄存器內容經常被改寫以實現對電機的實時控制。程序流程圖下面分別進行說明:
4.3.1主程序
主程序判定鍵號用的是查詢式:
O#鍵按下轉入初始化子程序;1#鍵按下轉入加速子程序;2#鍵按下轉入減速子程序。
另外為了防止誤操作增加了延時去抖動的再次判定鍵號環節。主程序流程圖如圖6所示:
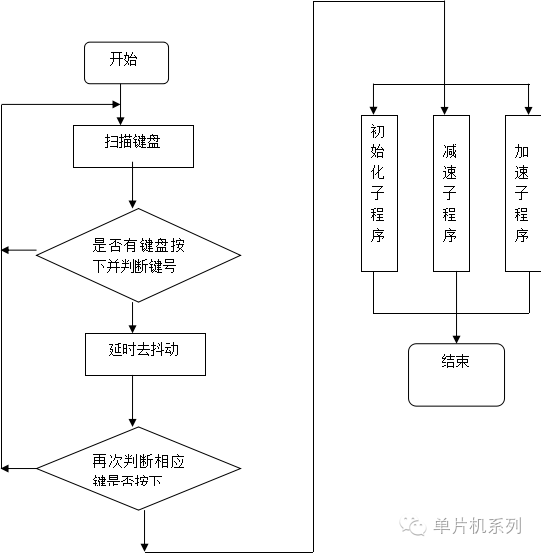
圖6主程序流程圖**
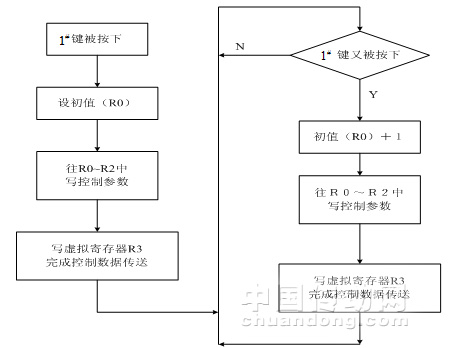
4.3.2初始化子程序
在初始化子程序要設定的是與電機和變頻器有關的基本參數,包括載波頻率的設定、調制波頻率范圍設定、脈沖延遲時間設定、最小刪除脈寬的設定、調制波形選擇、幅值控制設定等。
初始化寄存器的數據先以8位格式存入臨時寄存器R0,R1和R2中,然后通過虛擬寫操作R4再被存入初始化寄存器。
通常情況下,這些參數在電機工作過程中不要改變。
SA8281初始化子程序流程如圖7所示:

圖7 SA8281初始化子程序流程圖
4.3.3 調速子程序
調速子程序包括加速子程序和減速子程序,本文只介紹加速子程序,減速子程序類似于加速子程序。加速子程序控制參數包括調制波頻率控制字和調制波幅值控制字,它們要通過計算求得,方法:首先根據電機的U/F曲線得到調制波的頻率與幅值。
-
PWM
+關注
關注
114文章
5148瀏覽量
213427 -
逆變器
+關注
關注
283文章
4693瀏覽量
206326 -
IGBT
+關注
關注
1265文章
3762瀏覽量
248335 -
直流電源
+關注
關注
8文章
1290瀏覽量
52352 -
AT89C51單片機
+關注
關注
1文章
56瀏覽量
17992
發布評論請先 登錄
相關推薦
基于AT89C51單片機的LED點陣顯示控制系統設計
基于AT89C51的智能電風扇控制系統
基于AT89C51單片機直流電機PWM調速程序分享
如何設計一個以AT89C51單片機為下位機的壓力控制系統





 工商網監
工商網監
評論