 你可能不知道單片機軟件抗干擾技術有多么優秀!
你可能不知道單片機軟件抗干擾技術有多么優秀!
電子儀器設備的抗干擾技術是一門博大精深的領域。大部分的電子設備所在的工作環境往往比較惡劣,干擾嚴重,這些干擾會嚴重影響設備的正常工作,使其不能正常運行,比如空調就工作在高溫、大電流、強干擾(電機)的環境下。
因此,為了保證這些設備能在實際應用中可靠地工作,必須要周密考慮和解決抗干擾的問題。除了在硬件上考慮抗干擾的問題,我們也可以在軟件上做一些抗干擾的措施,來提高系統的抗干擾能力。
下面簡單介紹了幾個抗干擾的措施,起一個拋磚引玉的作用,希望各位同事可以在工作中加以應用和完善。
一、數字量輸入輸出中的軟件抗于擾
數字量輸入過程中的干擾,其作用時間較短,因此在采集數字信號時,可多次重復采集,直到若干次采樣結果一致時才認為其有效。例如通過A/D轉換器測量各種模擬量時,如果有干擾作用于模擬信號上,就會使A/D轉換結果偏離真實值。
這時如果只采樣一次A/D轉換結果,就無法知道其是否真實可靠,而必須進行多次采樣,得到一個A/D轉換結果的數據系列,對這一系列數據再作各種數字濾波處理,最后才能得到一個可信度較高的結果值。如果對于同一個數據點經多次采樣后得到的信號值變化不定,說明此時的干擾特別嚴重,已經超出允許的范圍,應該立即停止采樣并給出報警信號。
如果數字信號屬于開關量信號,如限位開關、操作按扭等,則不能用多次采樣取平均值的方法,而必須每次采樣結果絕對一致才行。這時可編寫一個采樣子程序,程序中設置有采樣成功和采樣失敗標志,如果對同一開關量信號進行若干次采樣,其采樣結果完全一致,則成功標志置位;否則失敗標志置位。后續程序可通過判別這些標志來決定程序的流向。
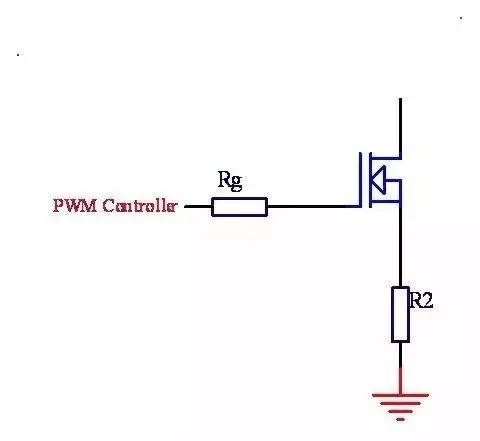
單片機控制的設備對外輸出的控制信號很多是以數字量的形式出現的。單片機給出一個正確的數據后,由于外部干擾的作用有可能使輸出裝置得到一個被改變了的錯誤數據,從而使輸出裝置發生誤動作。對于數字量輸出軟件抗干擾最有效的方法是重復輸出同一個數據,重復周期應盡量短。這樣輸出裝置在得到一個被干擾的錯誤信號后,還來不及反應,一個正確的信號又來到了,從而可以防止誤動作的產生。
在程序結構上,可將輸出過程安排在監控循環中。循環周期取得盡可能短,就能有效地防止輸出設備的錯誤動作。需要注意的是。經過這種安排后輸出功能是作為一個完整的模塊來執行的,與這種重復輸出措施相對應。
軟件設計中還必須為各個外部輸出設備建立一個輸出暫存單元,每次將應輸出的結果存入暫存單元中,然后再調用輸出功能模塊將各暫存單元的數據一一輸出,不管該數據是剛送來的,還是以前就有的。
這樣可以讓每個外部設備不斷得到控制數據,從而使干擾造成的錯誤狀態不能得以維持。在執行輸出功能模塊時,應將有關輸出接口芯片的初始狀態也一并重新設置。
因為由于干擾的作用可能使這些芯片的工作方式控制字發生變化,而不能實現正確的輸出功能,重新設置控制字就能避免這種錯誤.確保輸出功能的正確實現。
二、程序執行過程中的軟件抗于擾
前面述及的是針對輸入輸出通道而言的,干擾信號還未作用到CPU本身,CPU還能正確地執行各種抗干擾程序。如果干擾信號已經通過某種途徑作用到了CPU上,則CPU就不能按正常狀態執行程序,從而引起混亂,這就是通常所說的程序“跑飛”。
程序“跑飛”后使其恢復正常的一個最簡單的方法是使CPU復位,讓程序從頭開始重新運行。很多單片機控制的設備中都有設置人工復位電路。人工復位一般是在整個系統已經完全癱瘓,無計可施的情況下才不得已而為之的。因此在進行軟件設計時就要考慮到萬一程序“跑飛”,應讓其能夠自動恢復到正常狀態下運行。
程序“跑飛”后往往將一些操作數當作指令碼來執行,從而引起整個程序的混亂。采用“指令冗余”是使“跑飛”的程序恢復正常的一種措施。
所謂“指令冗余”,就是在一些關鍵的地方人為地插入一些單字節的空操作指令NOP。當程序“跑飛”到某條單字節指令上時,就不會發生將操作數當成指令來執行的錯誤。對于MCS51單片機來說,所有的指令都不會超過3個字節,因此在某條指令前面插入兩條NOP指令,則該條指令就不會被前面沖下來的失控程序拆散,而會得到完整的執行,從而使程序重新納入正常軌道。通常是在一些對程序的流向起關鍵作用的指令前面插入兩條NOP指令。應該注意的是在一個程序中“指令冗余”不能使用過多,否則會降低程序的執行效率。
采用“指令冗余”使“跑飛”的程序恢復正常是有條件的,首先“跑飛”的程序必須落到程序區,其次必須執行到所設置的冗余指令。如果“跑飛”的程序落到非程序區(如 EPROM中未用完的空間或某些數據表格等),或在執行到冗余指令之前已經形成了一個死循環,則“指令冗余”措施就不能使“跑飛”的程序恢復正常了。這時可以采用另一種軟件抗干擾措施,即腸胃“軟件陷阱”。
“軟件陷阱”是一條引導指令,強行將捕獲的程序引向一個指定的地址,在那里有一段專門處理錯誤的程序。假設這段處理錯誤的程序入口地址為ERR,則下面三條指令即組成一個“軟件陷阱”:
NOP
NOP
JR ERR
如果“跑飛”的程序落到一個臨時構成的死循環中時,冗余指令和軟件陷阱都將無能為力。這時可以采用人工復位的方法使系統恢復正常,實際上可以設計一種模仿人工監測的“程序運行監視器”,俗稱“看門狗”(WATCHDOG)。
WATCHDOG有如下特征:
(1)本身能獨立工作,基本上不依賴于 CPU。CPU只在一個固定的時間間隔內與之打一次交道,表明整個系統“目前尚屬正常”。
(2)當CPU落入死循環之后,能及時發現并使整個系統復位。
目前有很多單片機在內部已經集成了片內的硬件WATCHDOG電路,使用起來更為方便。也可以用軟件程序來形成WATCHDOG。
例如可以采用單片機一個多于不用的定時器來形成10ms的軟件WATCHDOG。軟件WATCHDOG啟動后,系統工作程序必須每隔小于10ms的時間重新設置定時器的計數初值。如果程序“跑飛”后執行不到這條指令,則在10ms之內即會產生一次定時器溢出中斷,則定時器中斷程序就可以處理系統“意外”的情況。
采用軟件WATCHDOG有一個弱點,就是如果“跑飛”的程序使某些操作數變形成為了修改定時器功能的指令,則執行這種指令后軟件WATCHDOG就會失效。因此軟件WATCHDOG的可靠性不如硬件高。
-
單片機
+關注
關注
6032文章
44522瀏覽量
633203
發布評論請先 登錄
相關推薦
XD08M3232紅外感應單片機在智能垃圾桶抗干擾性分析
XD08M3232接近感應單片機在智能垃圾桶抗干擾性分析
關于陶瓷電路板你不知道的事
又一電工不知道,施耐德變頻器怎么復位,如果不告訴你,你知道怎么復位嗎?

十天學會單片機可能嗎?單片機入門需要多久?

單片機圖形化編程軟件有哪些
做emwin應用,圖片太大,單片機ROM存不下怎么解決?
這些你不知道的臥式共模電感的選型依據
單片機抗干擾措施有哪些?

影響單片機硬件系統可靠運行的干擾因素
ADuCM360運行例程程序,在手接觸到電路板或電源線的時候會導致單片機重啟是為什么?
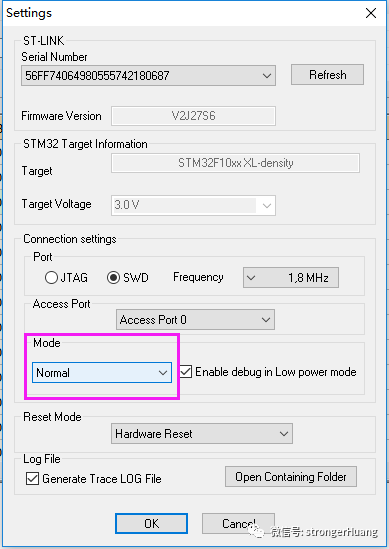
分享一下用ST-LINK Utility識別單片機程序是否跑飛





 工商網監
工商網監
評論