 FPGA時序邏輯電路寄存器講解
FPGA時序邏輯電路寄存器講解
數電基礎
時序邏輯電路會復雜很多,強烈推薦mooc上華中科技大學的數字電路與邏輯設計,是我看過講得最清楚的數電課。
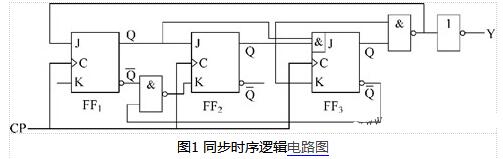
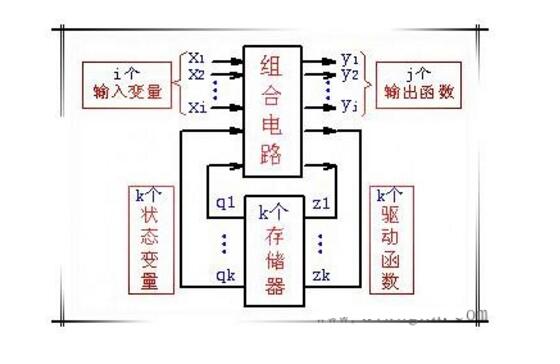
前幾節都是組合邏輯電路,即輸出只與當前輸入有關,而與電路原來的狀態無關。 組合邏輯最大的缺點就是會存在 競爭冒險 ,使用時序邏輯就可以極大地避免這種問題,從而使系統更加穩定。 時序邏輯電路有記憶的功能,含有存儲電路。 其輸出是輸入及輸出前一個時刻的狀態的函數。 這里引入了現態和次態的概念,現態是當前時刻的狀態,表示為Qn,而次態表示輸入發生變化后其輸出的狀態 ,表示為Qn+1。 時序邏輯電路可以分為同步時序和異步時序,同步時序有統一的時鐘,而異步時序的觸發器狀態的變化不是同一時間發生的。
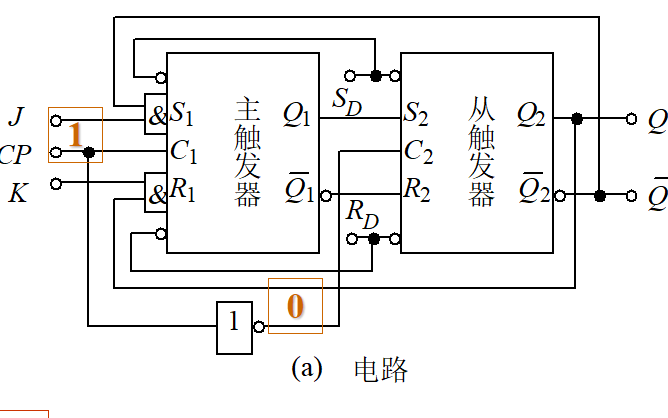
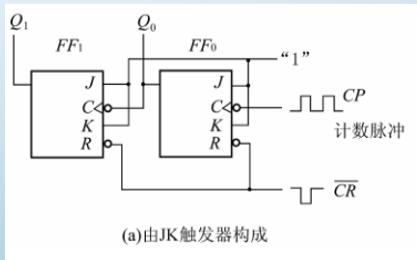
時序邏輯最基本的單元就是寄存器,寄存器具有存儲功能,一般是由D觸發器構成,由時鐘脈沖控制,每個D觸發器(DFF)能夠存儲一位二進制碼。
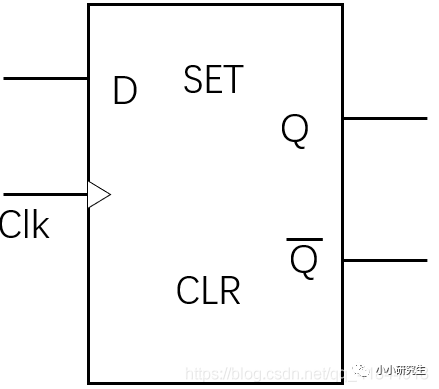
D觸發器
D觸發器是一種最簡單的觸發器。 D觸發器的特點是:在時鐘上升沿時,次態=輸入D,在時鐘處于高電平或低電平時,次態保持不變。 用表格表示:
| D | 時鐘 | Qn | Qn+1 |
|---|---|---|---|
| 0 | 上升沿觸發 | 0/1 | 0 |
| 1 | 上升沿觸發 | 0/1 | 1 |
| X | 0/1 | Qn | Qn |
同步復位的D觸發器
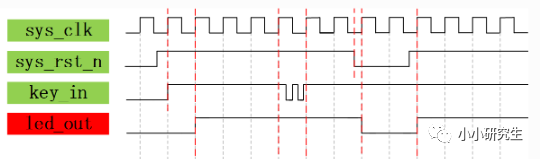
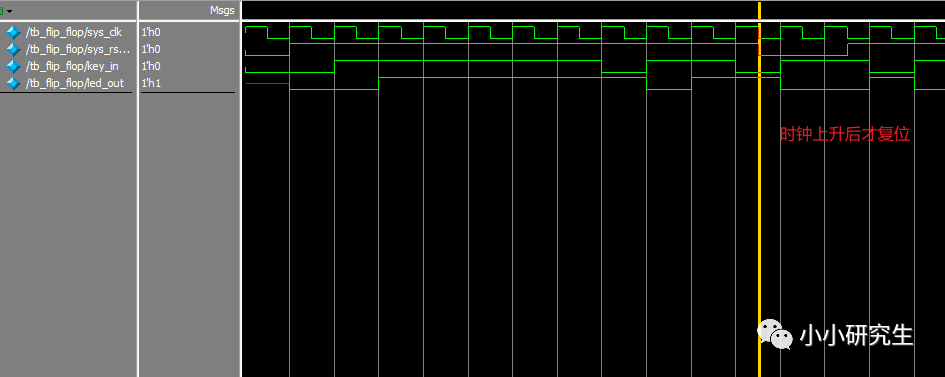
當時鐘的上升沿到來時,檢測到按鍵的復位操作才有效,否則無效。 clk是時鐘,rst_n是復位鍵(低電平有效),在前兩條虛線中,key_in在時鐘上升沿變為1,但是led_out不能立刻改變,而是在下一個時鐘上升沿時變為key_in(Qn+=D)。 key_in的抖動也不會影響到led_out。 注意 :第五條虛線,sys_rst_n被拉低后led_out沒有立刻復位變為0,而是當syc_clk的上升沿到來的時候(第六條虛線)led_out才復位成功,在復位釋放的時候也是相同原因(第七條虛線)。
同步復位的D觸發器
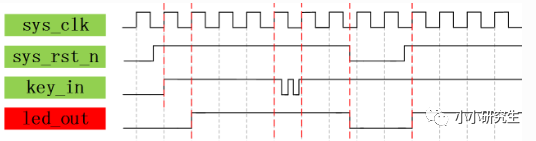
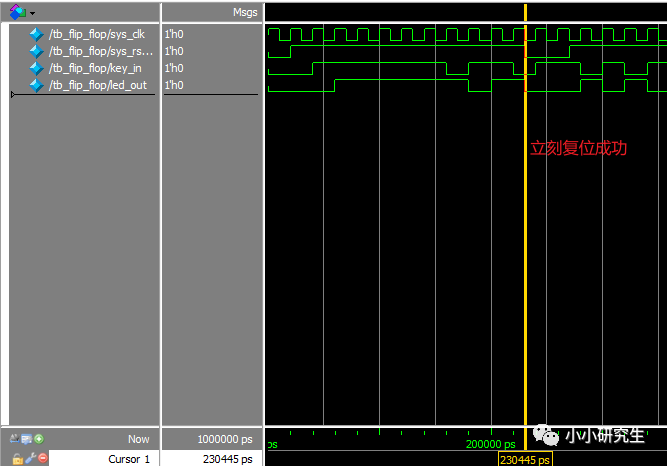
異步的意思是和工作時鐘不同步,只要有檢測到按鍵被按下,就立刻執行復位操作。 第五條虛線,sys_rst_n被拉低后led_out立刻變為0,沒有等時鐘上升沿,復位釋放時需要等待時鐘上升沿才會為key_in。
同步和異步復位的D觸發器區別只在于復位時需不需要等時鐘上升沿。 他們的共同點是對于電路中產生的毛刺有著極好的屏蔽作用。
設計規劃
本例中我們的目標和(一)中一樣,點亮一個LED燈。 但是這里使用的D觸發器,當按鍵被按下,key_in=0作為輸入給觸發器的D端口,然后在時鐘上升沿時會被傳送給輸出led_out=0使LED燈被點亮。
編寫代碼
同步復位的代碼
module flip_flop
(
input wire sys_clk , //系統時鐘50Mh
input wire sys_rst_n, //全局復位
input wire key_in ,
output reg led_out
);
always@(posedge sys_clk)
if(sys_rst_n == 1'b0)
led_out <= 1'b0;
else
led_out <= key_in;
endmodule
同步復位的特點是,復位時要等待上升沿,因此需要在上升沿時檢測復位狀態,這樣就能保證復位信號在上升沿時才有效。 使用always語句,時鐘上升沿時執行塊中的判斷語句,當復位信號為低電平時,LED燈點亮,否則,將key_in賦給led_out。 (四)中提到**always 時序邏輯塊中多用非阻塞賦值<=。 **
異步復位的代碼
module flip_flop
(
input wire sys_clk , //系統時鐘50Mh
input wire sys_rst_n , //全局復位
input wire key_in ,
output reg led_out
);
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)//sys_rst_n為低電平時復位,且是檢測到sys_rst_n的下
//降沿時立刻復位,不需等待sys_clk的上升沿來到后再復位
led_out <= 1'b0;
else
led_out <= key_in;
endmodule
異步復位的特點是,復位時不需要等待上升沿。 當電路發生always語句()中的變化時,執行always塊,由于復位不需要等待上升沿,這里發生變化的條件就包含時鐘上升和復位有效。 當時鐘上升或復位有效時,執行判斷語句,如果復位鍵為低電平則LED輸出低電平點亮,否則將key_in的值賦給led_out。
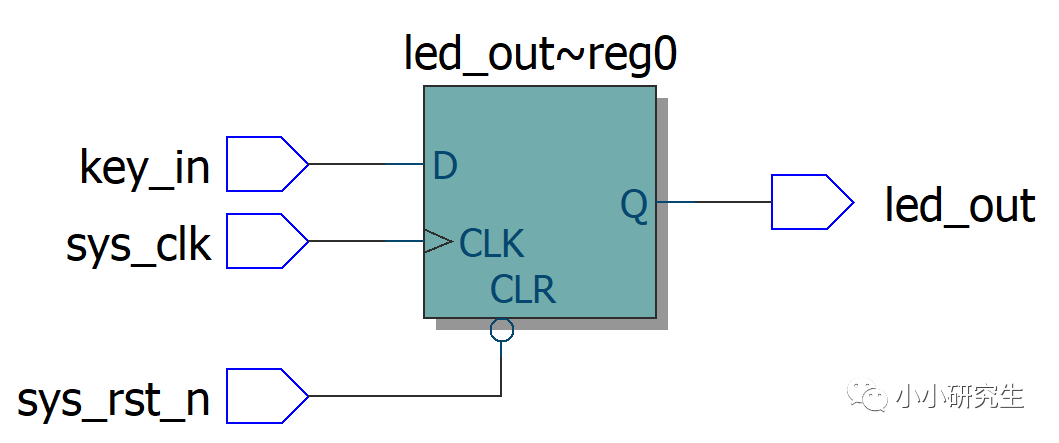
我們采用同步復位來演示。 將代碼綜合看RTL視圖
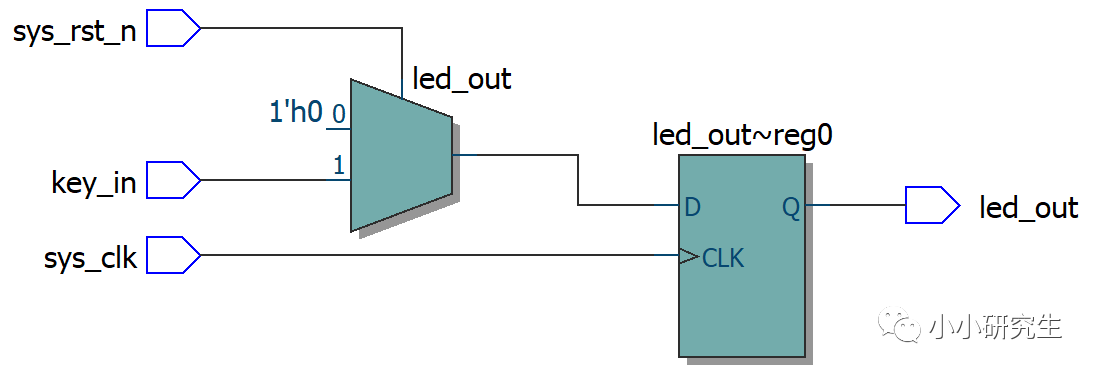
如果復位鍵為低電平,那么復位有效,0被傳給觸發器并輸出,如果復位鍵為高電平,那么key_in的值被傳給觸發器并輸出,與我們的設計含義一致。
編寫testbench
`timescale 1ns/1ns
module tb_flip_flop();
reg sys_clk ;
reg sys_rst_n ;
reg key_in ;
wire led_out ;
//初始化系統時鐘、全局復位和輸入信號
initial begin
sys_clk = 1'b1;
sys_rst_n <= 1'b0;
key_in <= 1'b0;
#20
sys_rst_n <= 1'b1; //初始化20ns后,復位釋放
#210
sys_rst_n <= 1'b0; //為了觀察同步復位和異步復位的區別
sys_rst_n <= 1'b1; //復位40ns后再次讓復位釋放掉
end
//sys_clk:模擬系統時鐘,每10ns電平翻轉一次,周期為20ns,頻率為50MHz
always #10 sys_clk = ~sys_clk;
always #20 key_in <= {$random} % 2;
//------------------------------------------------------------
initial begin
$timeformat(-9, 0, "ns", 6);
$monitor("@time %t: key_in=%b led_out=%b", $time, key_in, led_out);
end
//------------------------------------------------------------
//------------------flip_flop_inst-------------------
flip_flop flip_flop_inst
(
.sys_clk (sys_clk ), //input sys_clk
.sys_rst_n (sys_rst_n ), //input sys_rst_n
.key_in (key_in ), //input key_in
.led_out (led_out ) //output led_out
);
endmodule
初始化:initial 塊中時鐘信號用阻塞賦值=,其他信號用非阻塞賦值。 初始時時鐘為高電平,復位為低電平,key_in無所謂,此時輸出不能確定。 延時20ns后復位釋放,再延時210ns后再次復位, 這么做的目的是:由于時鐘周期是20ns(后面的代碼可以看出來),在時鐘下降沿復位可以觀察同步復位和異步復位的變化。 同步復位要等時鐘上升沿才變化,異步復位是即刻復位。 再延時40ns后再次復位釋放。
模擬時鐘:每隔10ns翻轉一次,周期為20ns。 模擬按鍵輸入:每隔20ns產生一個0或1的隨機數。 時間間隔應該小于等于時鐘周期,否則會產生毛刺。
打印和實例化與之前的沒有區別。
對比波形
同步復位電路:最開始的輸出不確定,20ns-210ns間,Qn+1=D,發現輸出與上一時刻的輸入相同,這是D觸發器的特征,210ns時復位有效,但是同步復位要等下一個時鐘上升沿,輸出才會為0。 250ns復位釋放,等到時鐘上升沿260ns之后,輸出才變為上一時刻的輸入。
觀察一下異步復位
分配管腳
不同開發板的管腳設置不同,需要看用戶手冊的介紹。 這里時鐘周期是20ns,也就是50MHz的時鐘晶振,選擇E1管腳。


全編譯后上板驗證
用的異步復位,S0為key_in,S1為復位,LED0是輸出。 當key_in不按時為高電平,燈也為高電平熄滅,當復位鍵按下時,即刻復位燈亮。 當key_in按下去時為低電平燈亮。

-
FPGA
+關注
關注
1626文章
21665瀏覽量
601808 -
寄存器
+關注
關注
31文章
5317瀏覽量
120002 -
時序邏輯電路
+關注
關注
2文章
94瀏覽量
16527 -
時序
+關注
關注
5文章
385瀏覽量
37275 -
數電
+關注
關注
15文章
63瀏覽量
29914
發布評論請先 登錄
相關推薦
數字電路設計之同步時序邏輯電路

時序邏輯電路的學習教程課件免費下載
組合邏輯電路和時序邏輯電路的學習課件免費下載





 工商網監
工商網監
評論