") ARM Cortex-M學(xué)習(xí)筆記:GPIO流水燈的前世今生
ARM Cortex-M學(xué)習(xí)筆記:GPIO流水燈的前世今生
開發(fā)環(huán)境:Keil 5.30
上一章通過控制GPIO的高低電平實現(xiàn)了流水燈,但只是告訴了大家怎么做,如何實現(xiàn)流水燈,本文將深入剖析的GPIO流水燈的前生今世,深入研究流水燈的調(diào)用邏輯和數(shù)據(jù)結(jié)構(gòu)。
2.1 GPIO配置概述
前面一章一個大概講解GPIO的配置過程和核心的寄存器,當(dāng)然啦,關(guān)于GPIO的寄存器遠不止我上一章列出來的,還有很多,具體請參看《STM32F10XXX參考手冊》中GPIO相關(guān)的內(nèi)容吧。

根據(jù)前面實現(xiàn)的GPIO流水燈,本文將其歸納如下:
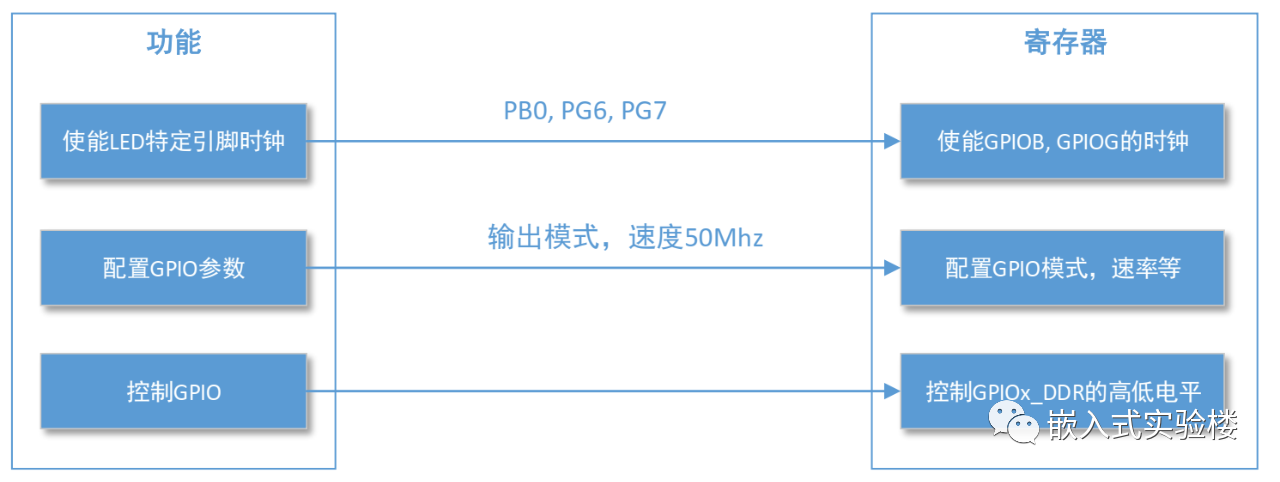
要想控制3個LED依次亮滅,就需要做以上三件事:使能時鐘,配置GPIO參數(shù),最后循環(huán)控制GPIO的高低電平就能實現(xiàn)流水燈的效果,GPIO的寄存器這里就不說了,更多詳細的寄存器描述看官方手冊就行,下面先來看看STM32的時鐘。
2.2 Cortex-M的時鐘系統(tǒng)
2.2.1 Cortex-M的系統(tǒng)架構(gòu)
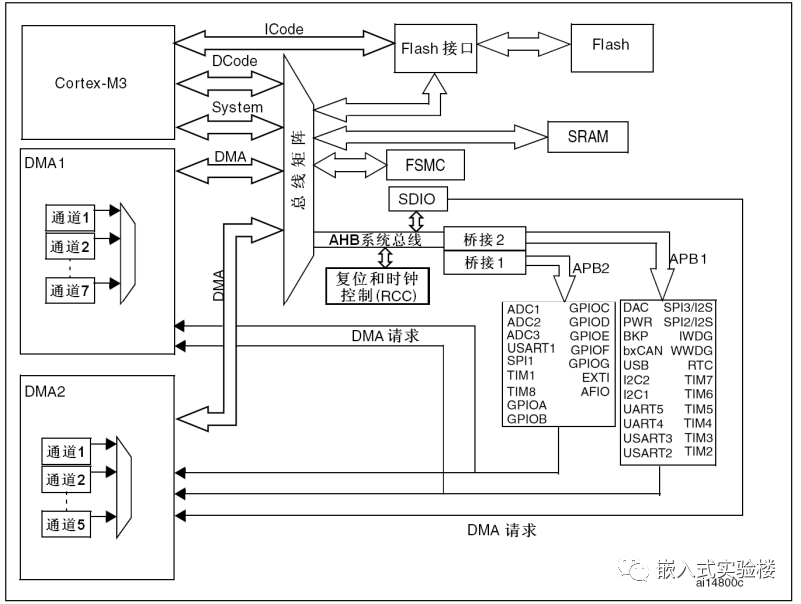
基于Cortex-M的系統(tǒng)架構(gòu)比51單片機強大很多了。首先我們看看Cortex-M3的系統(tǒng)架構(gòu)圖:
對于對比,在看看GD32F407xx的系統(tǒng)架構(gòu)圖。
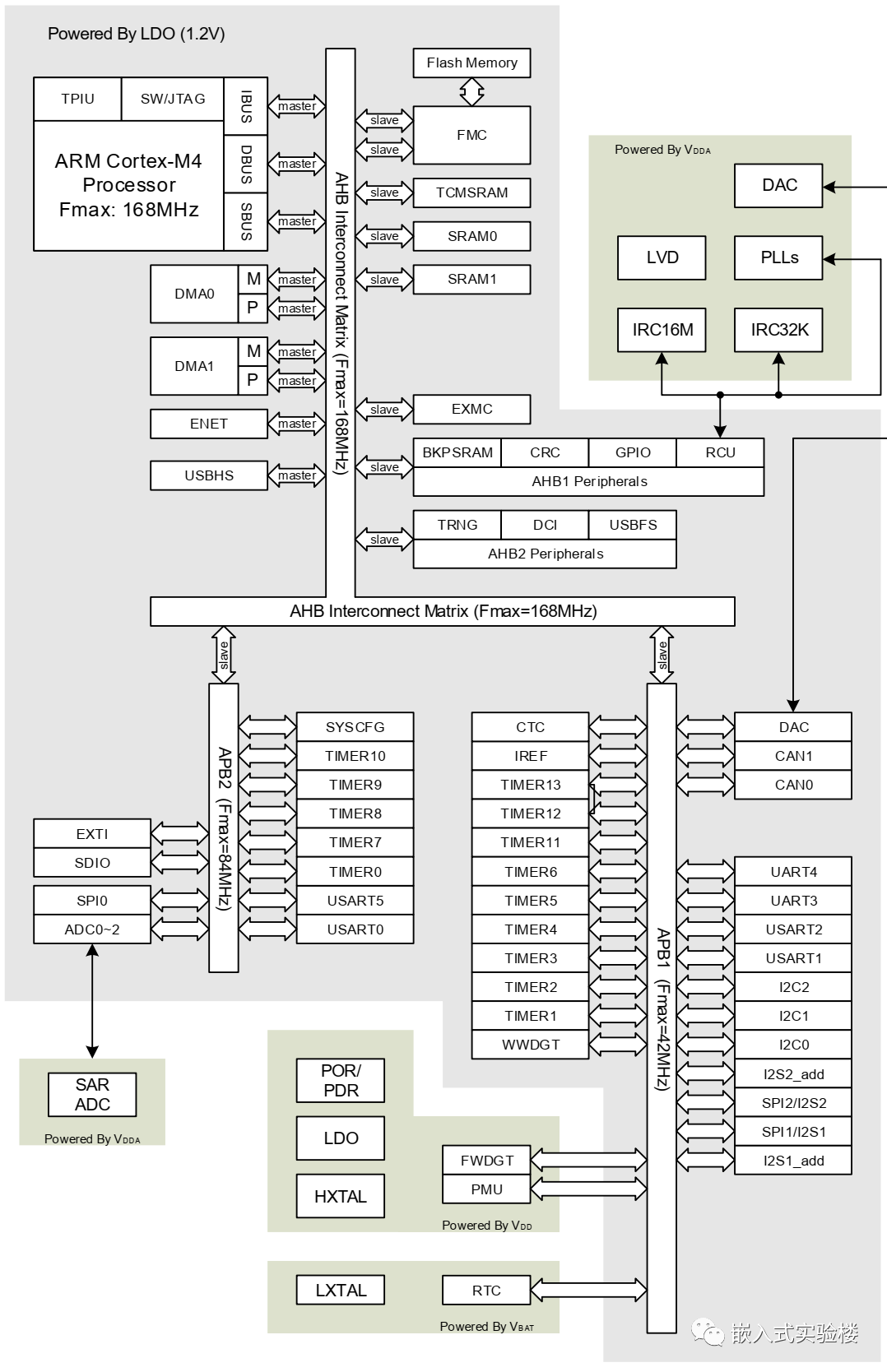
GD32F407xx是基于Cortex-M4設(shè)計的。可以看到,Cortex-M3和Cortex-M4大體是相同的,系統(tǒng)主要由四個驅(qū)動單元和四個被動單元構(gòu)成。
- 四個驅(qū)動單元
- 內(nèi)核 DCode 總線;
- 系統(tǒng)總線;
- 通用 DMA1(DMA0);
- 通用 DMA2(DMA1);
- 四被動單元
- AHB 到 APB 的橋:連接所有的 APB 設(shè)備;
- 內(nèi)部 FlASH 閃存;
- 內(nèi)部 SRAM;
- FSMC;
下面我們具體講解一下圖中幾個總線的知識:
① ICode 總線:該總線將 M3 內(nèi)核指令總線和閃存指令接口相連,指令的預(yù)取在該總線上面完成。
② DCode 總線:該總線將 M3 內(nèi)核的 DCode 總線與閃存存儲器的數(shù)據(jù)接口相連接,常量加載和調(diào)試訪問在該總線上面完成。
③系統(tǒng)總線:該總線連接 M3 內(nèi)核的系統(tǒng)總線到總線矩陣,總線矩陣協(xié)調(diào)內(nèi)核和 DMA 間訪問。
④ DMA 總線:該總線將 DMA 的 AHB 主控接口與總線矩陣相連,總線矩陣協(xié)調(diào) CPU 的DCode 和 DMA 到 SRAM,閃存和外設(shè)的訪問。
⑤總線矩陣:總線矩陣協(xié)調(diào)內(nèi)核系統(tǒng)總線和 DMA 主控總線之間的訪問仲裁,仲裁利用輪換算法。
⑥ AHB/APB 橋:這兩個橋在 AHB 和 2 個 APB 總線間提供同步連接, APB1 操作速度限于36MHz,APB2 操作速度全速。
對于系統(tǒng)架構(gòu)的知識,在剛開始學(xué)習(xí) STM32 的時候只需要一個大概的了解,大致知道是個什么情況即可。
2.2.2 STM32時鐘架構(gòu)
時鐘是整個處理器運行的基礎(chǔ),時鐘信號推動處理器內(nèi)各個部分執(zhí)行相應(yīng)的指令。時鐘系統(tǒng)就是CPU的脈搏,決定CPU速率,像人的心跳一樣只有有了心跳,人才能做其他的事情,而單片機有了時鐘,才能夠運行執(zhí)行指令,才能夠做其他的處理 (點燈,串口,ADC),時鐘的重要性不言而喻。
我們在學(xué)習(xí)51單片機時,其最小系統(tǒng)必有晶振電路,這塊電路就是單片機的時鐘來源,晶振的振蕩頻率直接影響單片機的處理速度。STM32相比51單片機就復(fù)雜得多,不僅是外設(shè)非常多,就連時鐘來源就有四個。但我們實際使用的時候只會用到有限的幾個外設(shè),使用任何外設(shè)都需要時鐘才能啟動,但并不是所有的外設(shè)都需要系統(tǒng)時鐘那么高的頻率,為了兼容不同速度的設(shè)備,有些高速,有些低速,如果都用高速時鐘,勢必造成浪費,而且,同一個電路,時鐘越快功耗越快,同時抗電磁干擾能力也就越弱,所以較為復(fù)雜的MCU都是采用多時鐘源的方法來解決這些問題,因此便有了STM32的時鐘系統(tǒng)和時鐘樹。
STM32三個不同的時鐘源可以用來驅(qū)動系統(tǒng)時鐘(SYSCLK):
● HSI晶振時鐘(高速內(nèi)部時鐘信號)
● HSE晶振時鐘(高速外部時鐘信號)
● PLL時鐘
STM32有兩個二級時鐘源:
● 40kHz的低速內(nèi)部RC,它可以驅(qū)動獨立看門狗,還可選擇地通過程序選擇驅(qū)動RTC。 RTC用于從停機/待機模式下自動喚醒系統(tǒng)。
● 32.768kHz的低速外部晶振,可選擇它用來驅(qū)動RTC(RTCCLK)。
每個時鐘源在不使用時都可以單獨被打開或關(guān)閉,這樣就可以優(yōu)化系統(tǒng)功耗。
當(dāng)使用HSI作為PLL時鐘的輸入時,所能達到的最大系統(tǒng)時鐘為64MHz。
2.2.3 STM32時鐘硬件電路
2.2.3.1 HSE時鐘
高速外部時鐘信號(HSE)由以下兩種時鐘源產(chǎn)生:
● HSE外部晶體 / 陶瓷諧振器(見下圖(a))
● HSE用戶外部時鐘(見下圖(b))
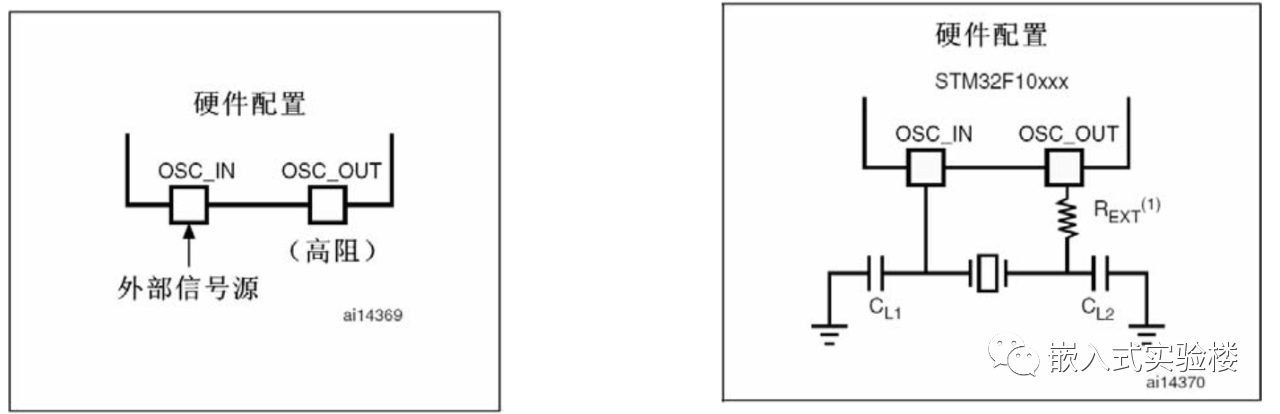
(a)外部時鐘 (b)晶振時鐘
1. 外部時鐘源(HSE旁路)
在這種模式下,必須提供一個外部時鐘源。它的頻率可高達25MHz。外部時鐘信號(占空比為50%的方波、正弦波或三角波)必須連到OSC_IN引腳,同時保證OSC_OUT引腳懸空,見上圖(a)。這個外部時鐘源是指從其他處理器等引入的時鐘源,STM32的demo板就是使用的這種方式,主控器MCU的外部時鐘源來自ST Link處理器提供的時鐘信號。
2. 外部晶體/陶瓷諧振器(HSE晶體)
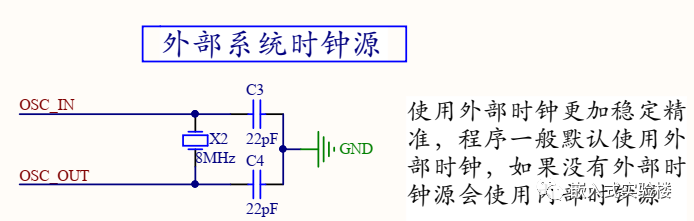
這個4~16MHz的外部晶振的優(yōu)點在于能產(chǎn)生非常精確的主時鐘。下圖顯示了它需要的相關(guān)硬件配置。諧振器和負載電容需要盡可能近地靠近振蕩器的引腳,以減小輸出失真和啟動穩(wěn)定時間。負載電容值必須根據(jù)選定的晶振進行調(diào)節(jié)。這種方式也是我們常用的方式,具體電路如下所示。
2.2.3.2 LSE時鐘
低速外部時鐘源(LSE)可以由兩個可能的時鐘源來產(chǎn)生:
● LSE外部晶體 / 陶瓷諧振器(見下圖(a))
● LSE用戶外部時鐘(見下圖(b))
1. 外部源(LSE旁路)
在這種模式下,必須提供一個外部時鐘源。它的頻率必須為32.768kHz。外部信號(占空比為50%的方波、正弦波或三角波)必須連到OSC32_IN引腳,同時保證OSC_OUT引腳懸空。
2. 外部晶體/陶瓷諧振器(LSE晶體)
這個LSE晶體是一個32.768kHz的低速外部晶體或陶瓷諧振器。它的優(yōu)點在于能為實時時鐘部件(RTC)提供一個低速的,但高精確的時鐘源。 RTC可以用于時鐘/日歷或其它需要計時的場合。諧振器和加載電容需要盡可能近地靠近晶振引腳,這樣能使輸出失真和啟動穩(wěn)定時間減到最小。負載電容值必須根據(jù)選定的晶振進行調(diào)節(jié)。
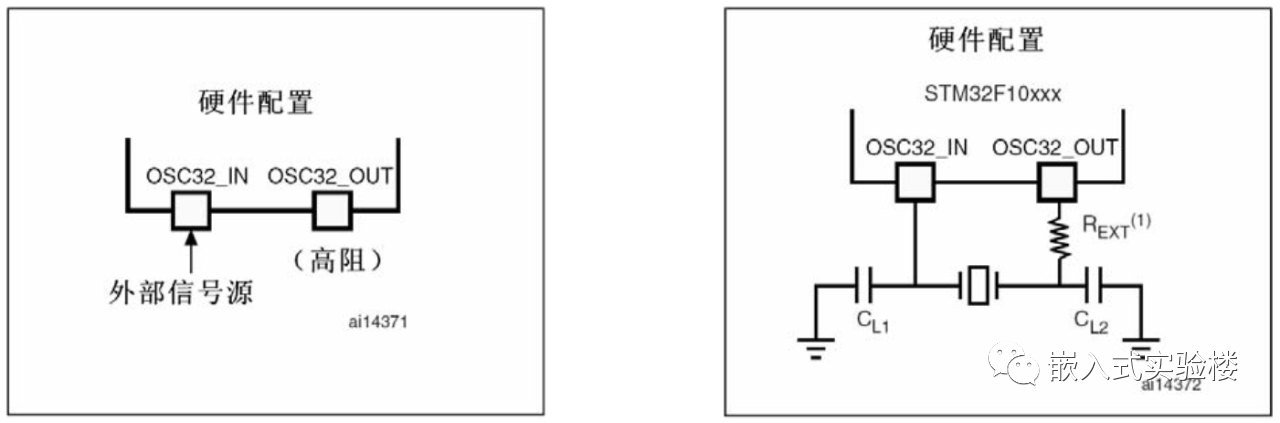
(a)外部時鐘 (b)晶振時鐘
外部晶體時鐘如下圖所示。
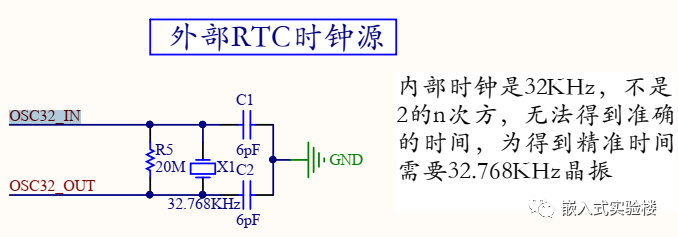
HSE和LSE外部晶體兩時鐘電路的兩個電容式為了抗干擾。對抗自然界中的一些干擾,如雷擊。
2.2.4 STM32的時鐘系統(tǒng)
STM32 芯片為了實現(xiàn)低功耗,設(shè)計了一個功能完善但卻非常復(fù)雜的時鐘系統(tǒng)。普通的MCU 一般只要配置好 GPIO 的寄存器就可以使用了,但 STM32 還有一個步驟,就是開啟外設(shè)時鐘。
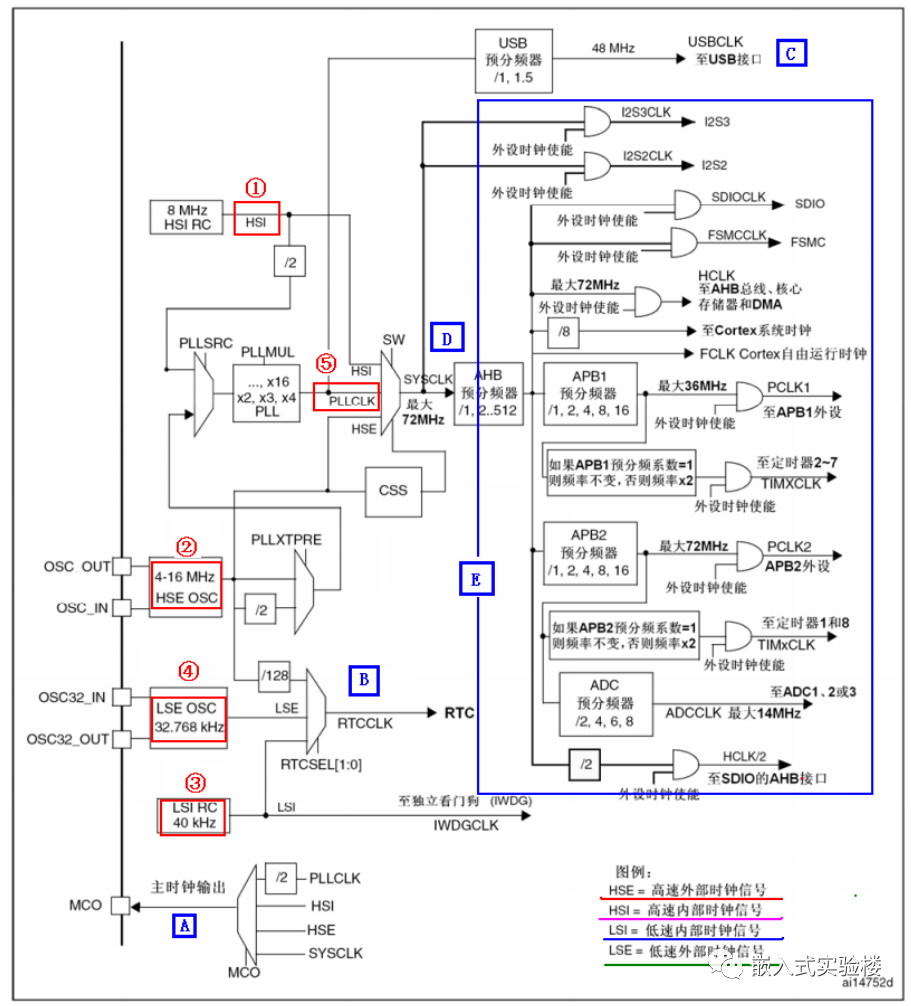
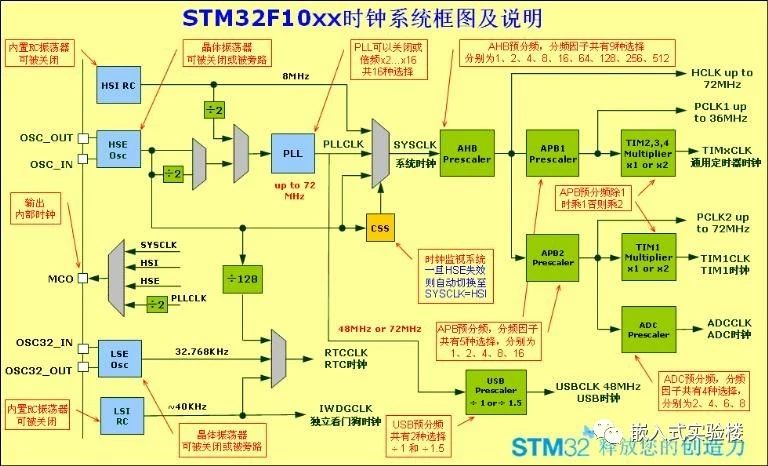
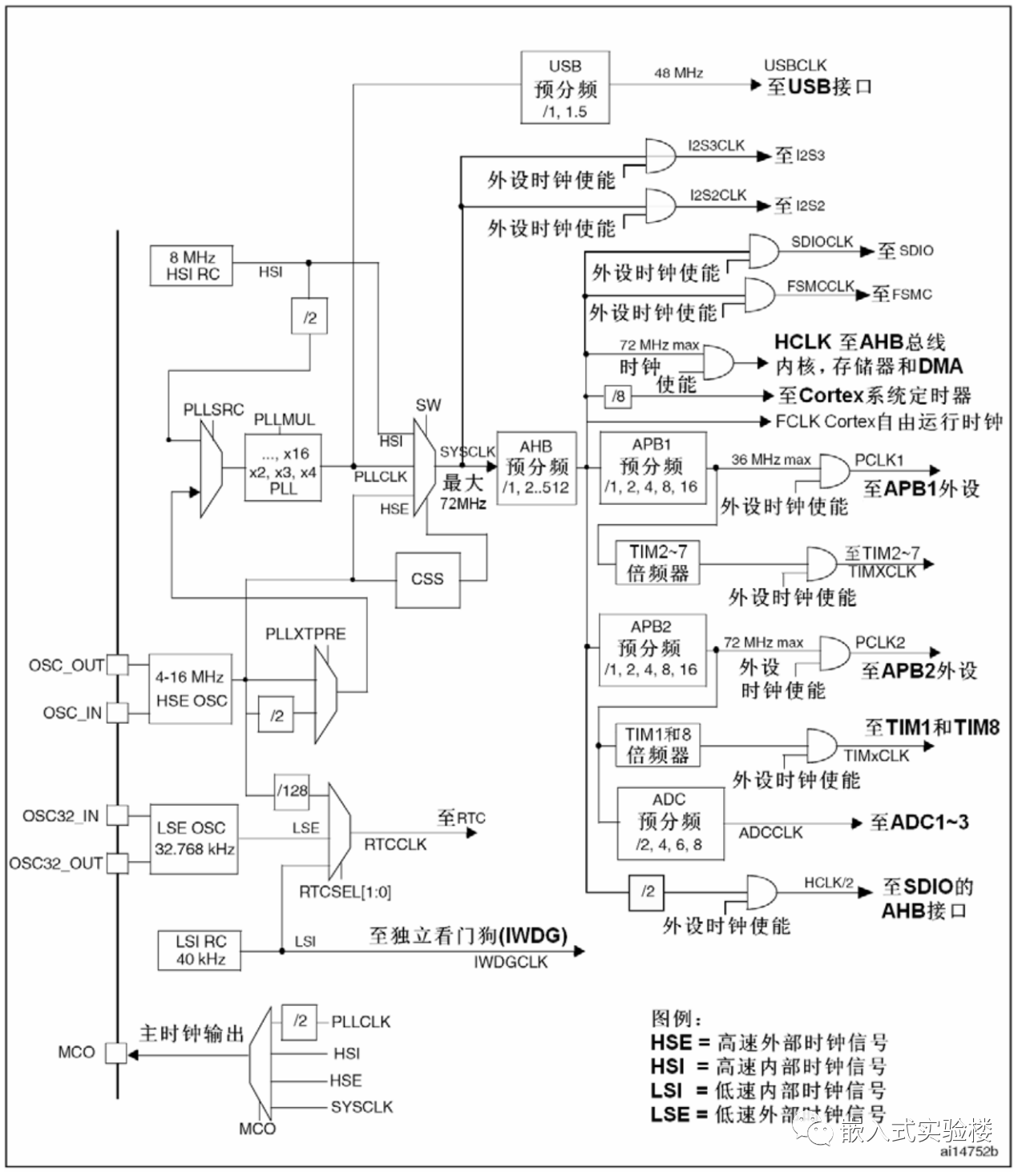
在 STM32 中,可分為五種時鐘源,為 HSI、 HSE、 LSI、 LSE、 PLL。從時鐘頻率來分可以分為高速時鐘源和低速時鐘源,其中 HIS, HSE 以及 PLL 是高速時鐘, LSI 和 LSE 是低速時鐘。從來源可分為外部時鐘源和內(nèi)部時鐘源,外部時鐘源就是從外部通過接晶振的方式獲取時鐘源,其中 HSE 和 LSE 是外部時鐘源,其他的是內(nèi)部時鐘源。下面我們看看 STM32 的 5 個時鐘源,我們講解順序是按圖中紅圈標(biāo)示的順序:
1HSI 是 高速內(nèi)部時鐘 , RC 振蕩器,頻率為 8MHz。
②HSE 是 高速外部時鐘 ,可接石英 /陶瓷諧振器,或者接外部時鐘源,頻率范圍為4MHz~16MHz。 我們的開發(fā)板接的是 8M 的晶振。 當(dāng)使用有源晶振時,時鐘從 OSC_IN 引腳進入, OSC_OUT 引腳懸空,當(dāng)選用無源晶振時,時鐘從 OSC_IN 和 OSC_OUT 進入,并且要配諧振電容。 HSE 最常使用的就是 8M 的無源晶振。 當(dāng)確定 PLL 時鐘來源的時候, HSE 可以不分頻或者 2 分頻,這個由時鐘配置寄存器 CFGR 的位 17。
③LSI 是 低速內(nèi)部時鐘 ,RC 振蕩器,頻率為 40kHz。 獨立看門狗的時鐘源只能是 LSI,同時 LSI 還可以作為 RTC 的時鐘源。
④LSE 是 低速外部時鐘 ,接頻率為 32.768kHz 的石英晶體。 這個主要是 RTC 的時鐘源。
⑤PLL 為鎖相環(huán)倍頻輸出,其時鐘輸入源可選擇為 HSI/2、HSE 或者 HSE/2。 倍頻可選擇為2~16 倍,但是其輸出頻率最大不得超過 72MHz。
圖中我們用 A~E 標(biāo)示我們要講解的地方。
A. MCO 是 STM32 的一個時鐘輸出 IO(PA8),它可以選擇一個時鐘信號輸出,可以選擇為 PLL 輸出的 2 分頻、 HSI、 HSE、或者系統(tǒng)時鐘。 這個時鐘可以用來給外部其他系統(tǒng)提供時鐘源。
B. 這里是 RTC 時鐘源,從圖上可以看出, RTC 的時鐘源可以選擇 LSI, LSE,以及HSE 的 128 分頻。
C. 從圖中可以看出 C 處 USB 的時鐘是來自 PLL 時鐘源。 STM32 中有一個全速功能的 USB 模塊,其串行接口引擎需要一個頻率為 48MHz 的時鐘源。該時鐘源只能從 PLL 輸出端獲取,可以選擇為 1.5 分頻或者 1 分頻,也就是,當(dāng)需要使用 USB模塊時, PLL 必須使能,并且時鐘頻率配置為 48MHz 或 72MHz。
D. D 處就是 STM32 的系統(tǒng)時鐘 SYSCLK,它是供 STM32 中絕大部分部件工作的時鐘源。系統(tǒng)時鐘可選擇為 PLL 輸出、 HSI 或者 HSE。系統(tǒng)時鐘最大頻率為 72MHz,當(dāng)然你也可以超頻,不過一般情況為了系統(tǒng)穩(wěn)定性是沒有必要冒風(fēng)險去超頻的。
E. 這里的 E 處是指其他所有外設(shè)了。從時鐘圖上可以看出,其他所有外設(shè)的時鐘最終來源都是 SYSCLK。 SYSCLK 通過 AHB 分頻器分頻后送給各模塊使用。這些模塊包括:
①AHB 總線、內(nèi)核、內(nèi)存和 DMA 使用的 HCLK 時鐘。
②通過 8 分頻后送給 Cortex 的系統(tǒng)定時器時鐘,也就是 systick 了。
③直接送給 Cortex 的空閑運行時鐘 FCLK。
④送給 APB1 分頻器。 APB1 分頻器輸出一路供 APB1 外設(shè)使用(PCLK1,最大頻率 36MHz),另一路送給定時器(Timer)2、 3、 4 倍頻器使用。
⑤送給 APB2 分頻器。 APB2 分頻器分頻輸出一路供 APB2 外設(shè)使用(PCLK2,最大頻率 72MHz),另一路送給定時器(Timer)1 倍頻器使用。
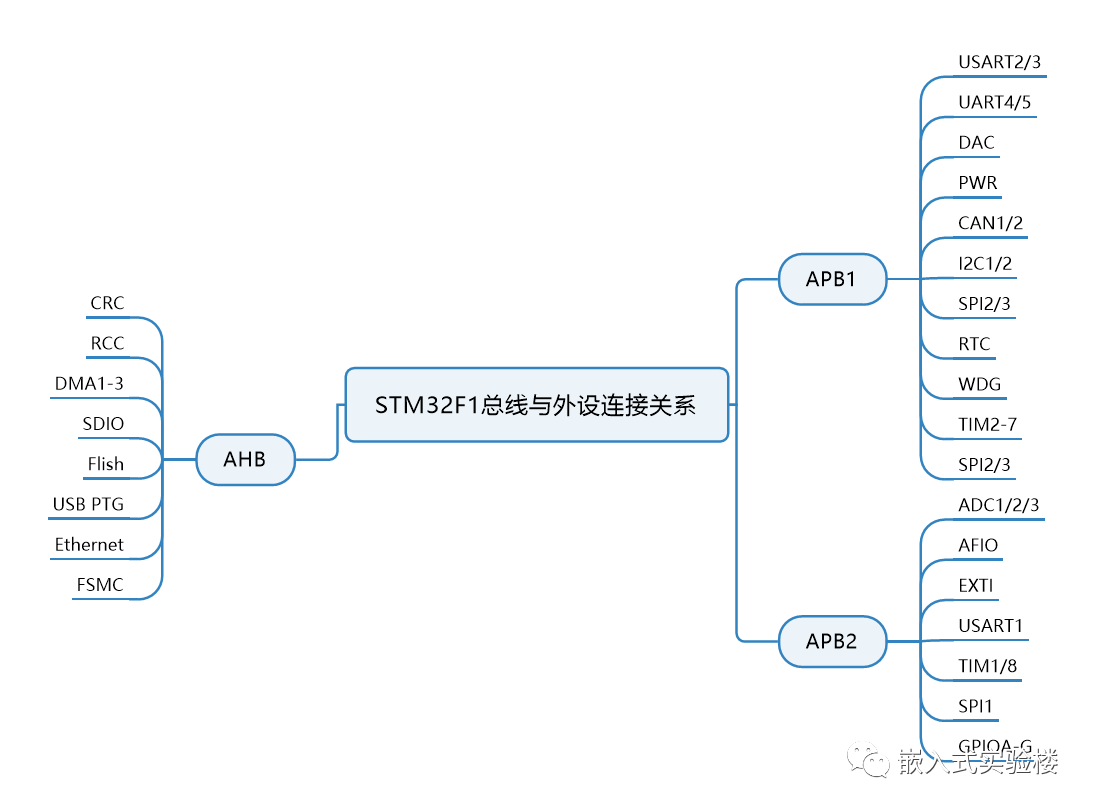
其中需要理解的是 APB1 和 APB2 的區(qū)別, APB1 上面連接的是低速外設(shè),包括電源接口、備份接口、 CAN、 USB、 I2C1、 I2C2、 UART2、 UART3 等等, APB2 上面連接的是高速外設(shè)包括 UART1、 SPI1、 Timer1、 ADC1、 ADC2、所有普通 IO 口(PA~PE)、第二功能 IO 口等。
不同的總線有不同的頻率,不同的外設(shè)掛在不同的總線下,為了更適合初學(xué)者查閱,筆者把常用的外設(shè)與總線的對應(yīng)關(guān)系總結(jié)如下:
SystemInit()函數(shù)中設(shè)置的系統(tǒng)時鐘大小:
- SYSCLK(系統(tǒng)時鐘) =72MHz
- AHB 總線時鐘(使用 SYSCLK) =72MHz
- APB1 總線時鐘(PCLK1) =36MHz
- APB2 總線時鐘(PCLK2) =72MHz
- PLL 時鐘 =72MHz
具體代碼請讀者查看工程文件的system_stm32f10x.c文件。
舉個例子:Keil編寫程序是默認的時鐘為72Mhz,其實是這么來的:外部晶振(HSE)提供的8MHz(與電路板上的晶振的相關(guān))通過PLLXTPRE分頻器后,進入PLLSRC選擇開關(guān),進而通過PLLMUL鎖相環(huán)進行倍頻(x9)后,為系統(tǒng)提供72MHz的系統(tǒng)時鐘(SYSCLK)。 之后是AHB預(yù)分頻器對時鐘信號進行分頻,然后為低速外設(shè)提供時鐘。
或者內(nèi)部RC振蕩器(HSI) 為8MHz /2 為4MHz 進入PLLSRC選擇開關(guān),通過PLLMUL鎖相環(huán)進行倍頻(x18)后為72MHz。
PS: 網(wǎng)上有很多人說是5個時鐘源,這種說法有點問題,學(xué)習(xí)之后就會發(fā)現(xiàn)PLL并不是自己產(chǎn)生的時鐘源,而是通過其他三個時鐘源倍頻得到的時鐘,這點在前文已近講解得很清楚了。
2.2.5 STM32的時鐘配置剖析
既然時鐘搞清楚了,接下來回到上一章的配置時鐘的代碼:
/*開啟LED的外設(shè)時鐘*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB|RCC_APB2Periph_GPIOG, ENABLE);
RCC_APB2PeriphClockCmd就是配置時鐘的函數(shù),函數(shù)原型如下:
/**
* @brief Enables or disables theHigh Speed APB (APB2) peripheral clock.
* @param RCC_APB2Periph:specifies the APB2 peripheral to gates its clock.
* This parameter can be anycombination of the following values:
* @arg RCC_APB2Periph_AFIO,RCC_APB2Periph_GPIOA, RCC_APB2Periph_GPIOB,
* RCC_APB2Periph_GPIOC,RCC_APB2Periph_GPIOD, RCC_APB2Periph_GPIOE,
* RCC_APB2Periph_GPIOF,RCC_APB2Periph_GPIOG, RCC_APB2Periph_ADC1,
* RCC_APB2Periph_ADC2,RCC_APB2Periph_TIM1, RCC_APB2Periph_SPI1,
* RCC_APB2Periph_TIM8,RCC_APB2Periph_USART1, RCC_APB2Periph_ADC3,
* RCC_APB2Periph_TIM15,RCC_APB2Periph_TIM16, RCC_APB2Periph_TIM17,
* RCC_APB2Periph_TIM9,RCC_APB2Periph_TIM10, RCC_APB2Periph_TIM11
* @param NewState: new state ofthe specified peripheral clock.
* This parameter can be: ENABLEor DISABLE.
* @retval None
*/
voidRCC_APB2PeriphClockCmd(uint32_t RCC_APB2Periph, FunctionalState NewState)
{
/* Check the parameters */
assert_param(IS_RCC_APB2_PERIPH(RCC_APB2Periph));
assert_param(IS_FUNCTIONAL_STATE(NewState));
if (NewState != DISABLE)
{
RCC->APB2ENR |= RCC_APB2Periph;
}
else
{
RCC->APB2ENR &= ~RCC_APB2Periph;
}
}
第一個參數(shù)就是具體的外設(shè)時鐘,第二參數(shù)就是時鐘狀態(tài)開關(guān),整個函數(shù)很簡單,就是配置RCC->APB2ENR,assert_param是檢查參數(shù)的,關(guān)于assert_param詳細講解看附錄的小貼士。
參數(shù)RCC_APB2Periph傳入值是通過宏來定義的,這樣的好處也是便于移植,如果換了MCU,架構(gòu)一樣,只需要就該底層驅(qū)動就行,不需要更改上層應(yīng)用,這樣就提高了開發(fā)效率。 言歸正傳,我們傳入的RCC_APB2Periph_GPIOB和RCC_APB2Periph_GPIOG定義如下。
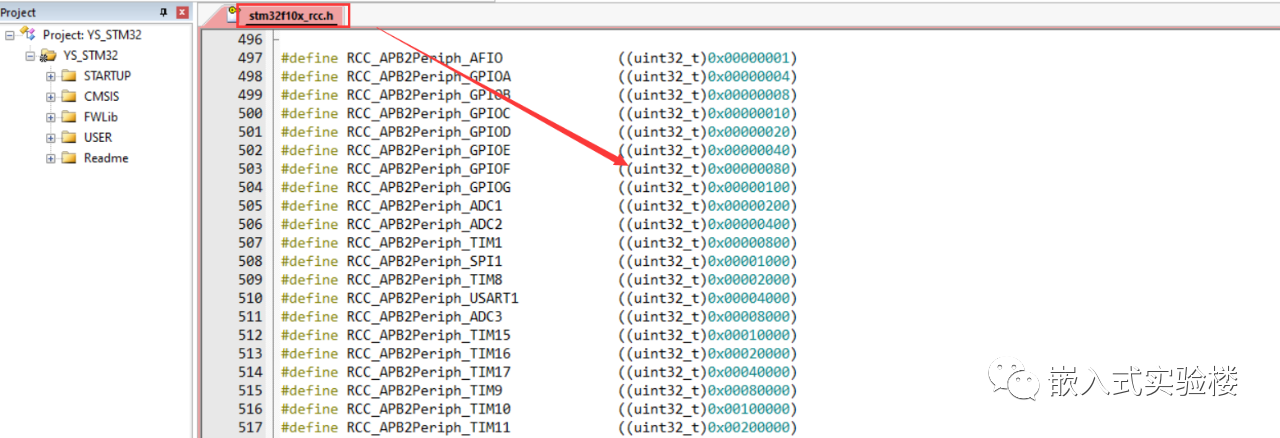
其實就是一個個偏移而已。 我們還是看看RCC_APB2ENR寄存器,
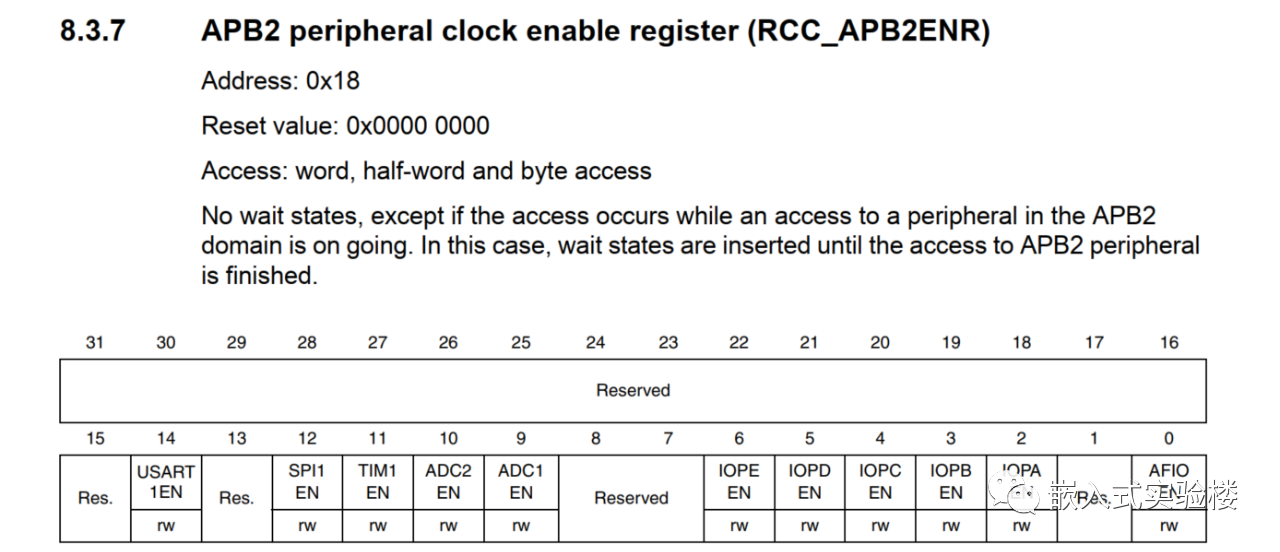
如果要配置GPIOB的時鐘就是要將第3位置1,因此轉(zhuǎn)換成10進制就是8,同理GPIOG也是一樣的。
RCC_APB2ENR的地址是0x18,更準(zhǔn)確的是說偏移地址是0x18,在代碼中也是有體現(xiàn)的,我們看看RCC結(jié)構(gòu)體吧。
#define RCC ((RCC_TypeDef *) RCC_BASE)
這里是通過宏的方式定義的,結(jié)構(gòu)體就是RCC_TypeDef。
/**
* @brief Reset and Clock Control
*/
typedef struct
{
__IO uint32_t CR;
__IO uint32_t CFGR;
__IO uint32_t CIR;
__IO uint32_t APB2RSTR;
__IO uint32_t APB1RSTR;
__IO uint32_t AHBENR;
__IO uint32_t APB2ENR;
__IO uint32_t APB1ENR;
__IO uint32_t BDCR;
__IO uint32_t CSR;
#ifdef STM32F10X_CL
__IO uint32_t AHBRSTR;
__IO uint32_t CFGR2;
#endif /* STM32F10X_CL */
#if defined (STM32F10X_LD_VL) ||defined (STM32F10X_MD_VL) || defined (STM32F10X_HD_VL)
uint32_t RESERVED0;
__IO uint32_t CFGR2;
#endif /* STM32F10X_LD_VL ||STM32F10X_MD_VL || STM32F10X_HD_VL */
} RCC_TypeDef;
這里可以看到有__IO修飾結(jié)構(gòu)體成員,關(guān)于__IO詳細講解看附錄的小貼士。 RCC_TypeDef中的成員都是32位,因此偏移都是4,而APB2ENR的偏移量就是寄存器表的偏移一一對應(yīng)了,其他的結(jié)構(gòu)體都是這樣定義的。
在說說RCC_BASE,這就實際的RCC的物理地址,其中的依賴關(guān)系如下:
#define PERIPH_BASE ((uint32_t)0x40000000) /*!
這樣我們就知道最終的RCC的基地址是0x0x40021000。 這個地址也可以在參考手冊中找到。
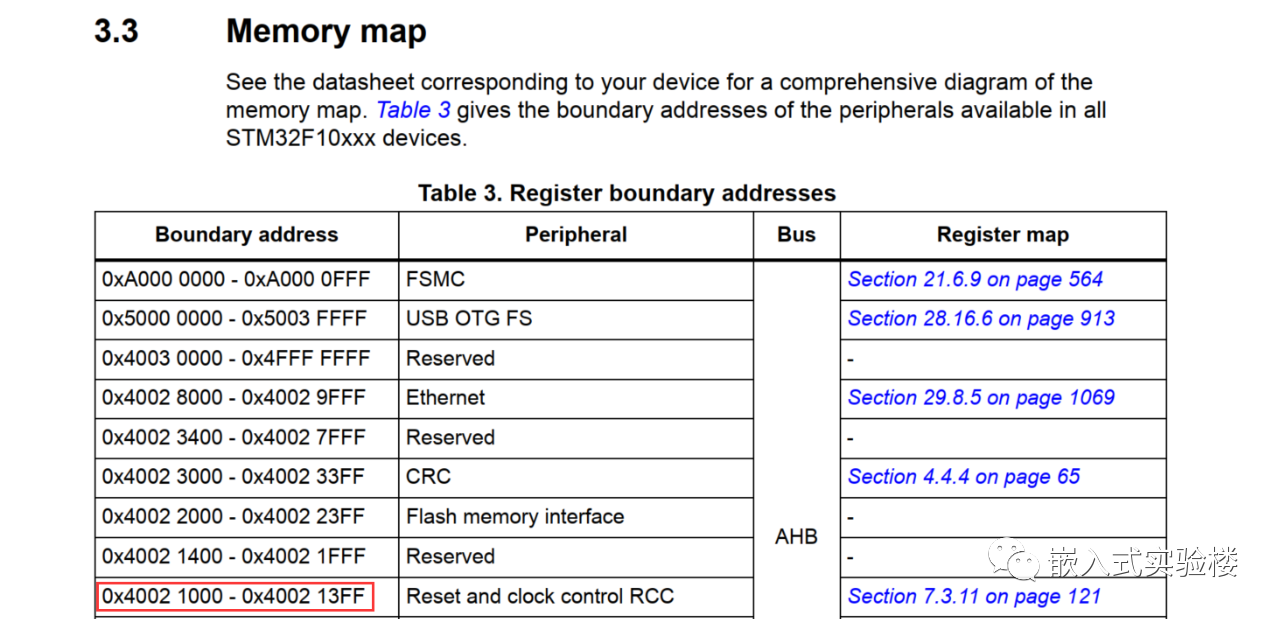
是不就都對上了,MCU所有的外設(shè)都對應(yīng)了一個地址,因此通過操作該地址就能控制相應(yīng)的功能,關(guān)于STM32的存儲管理在后文會詳細描述,這里先了解個大概就好。
值得注意的是,既然有RCC_APB2PeriphClockCmd函數(shù),肯定還有RCC_APB1PeriphClockCmd,它們各自配置的時鐘可以從系統(tǒng)架構(gòu)中看到,當(dāng)然啦,函數(shù)的說明中也列舉了具體的外設(shè)。
到這里基本上時鐘的配置就完成了。 但是我想還是有很多朋友沒有很明白,下面就GPIO的配置從地址映射和固件庫的封裝兩個方便再來詳細總結(jié)下固件庫是如何完成GPIO的具體操作的。
2.3 Cortex-M的地址映射
我們先看看51 單片機中是怎么做的,51 單片機開發(fā)中會引用一個 reg51.h 的頭文件,51單片機是通過以下方式將名字和寄存器聯(lián)系起來的:
sfr P0 =0x80;
sfr 也是一種擴充數(shù)據(jù)類型,占用一個內(nèi)存單元,值域為 0~255。 利用它可以訪問 51 單片機內(nèi)部的所有特殊功能寄存器。 如用 sfr P1 = 0x90 這一句定義 P1 為 P1 端口在片內(nèi)的寄存器。 然后我們往地址為 0x80 的寄存器設(shè)值的方法是: P0=value; 通過改變value的值來控制單片機。
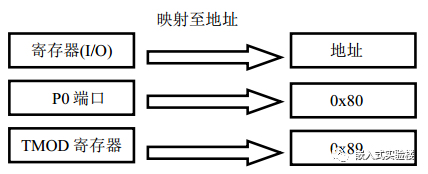
所謂地址映射,就是將芯片上的存儲器甚至 I/O 等資源與地址建立一一對應(yīng)的關(guān)系。 如果某地址對應(yīng)著某寄存器,我們就可以運用 C 語言的指針來尋址并修改這個地址上的內(nèi)容,從而實現(xiàn)修改該寄存器的內(nèi)容。 Cortex-M的地址映射也是類似的。 Cortex-M有 32 根地址線,所以它的尋址空間大小為 2 ^32^bit=4 GB。 ARM 公司設(shè)計時,預(yù)先把這 4 GB 的尋址空間大致地分配好了。 它把從 0x40000000 至 0x5FFFFFFF( 512 MB)的地址分配給片上外設(shè)。 通過把片上外設(shè)的寄存器映射到這個地址區(qū),就可以簡單地以訪問內(nèi)存的方式,訪問這些外設(shè)的寄存器,從而控制外設(shè)的工作。 這樣,片上外設(shè)可以使用 C 語言來操作。
stm32f10x.h 這個文件中重要的內(nèi)容就是把 STM32 的所有寄存器進行地址映射。 如同51 單片機的
在這里我們以流水燈中的 GPIOB 為例進行剖析,如果是其他的 IO 端口,則改成相應(yīng)的地址即可。 在這個文件中一系列宏實現(xiàn)了地址映射。
#define GPIOB_BASE(APB2PERIPH_BASE + 0xC00)
#define APB2PERIPH_BASE (PERIPH_BASE+ 0xC00
#define PERIPH_BASE((uint32_t)0x40000000)
這幾個宏定義是從文件中的幾個部分抽離出來的,具體的內(nèi)容讀者可參考stm32f10x.h 源碼。
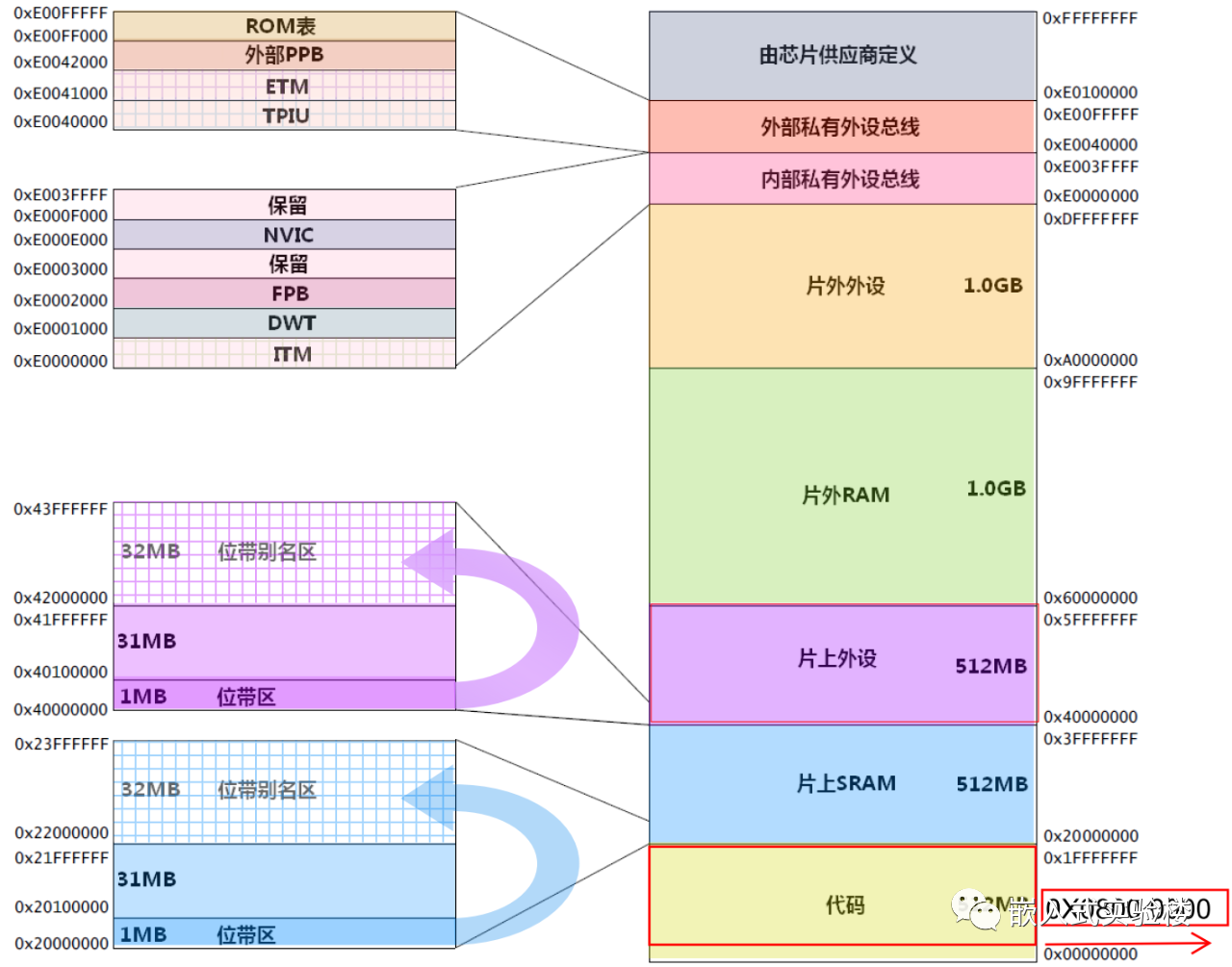
首先看到 PERIPH_BASE 這個宏,宏展開為 0x40000000,并把它強制轉(zhuǎn)換為 uint32_t的 32 位類型數(shù)據(jù),這是因為 STM32 的地址是 32 位的,0x40000000 這個地址是 Cortex-M3 核分配給片上外設(shè) 512MB 尋址空間中的第一個地址,我們把0x40000000 稱為外設(shè)基地址。
接下來是宏 APB2PERIPH_BASE,宏展開為 PERIPH_BASE(外設(shè)基地址)加上偏移地址 0x10000,即指向的地址為 0x40010000。 這個 APB2PERIPH_BASE 宏是什么地址呢? STM32 不同的外設(shè)是掛載在不同的總線上的。 STM32 芯片有 AHB 總線、APB2總線和 APB1 總線,掛載在這些總線上的外設(shè)有特定的地址范圍。
其中像 GPIO、串口 1、ADC 及部分定時器是掛載在稱為 APB2 的總線上,掛載到APB2 總線上的外設(shè)地址空間是從0x40010000 至 0x40013FFF地址。 這里的第一個地址,也就是 0x40010000,稱為 APB2PERIPH_BASE (APB2 總線外設(shè)基地址)。
而 APB2 總線基地址相對于外設(shè)基地址的偏移量為 0x10000 個地址,即為 APB2 相對外設(shè)基地址的偏移地址,見下表。
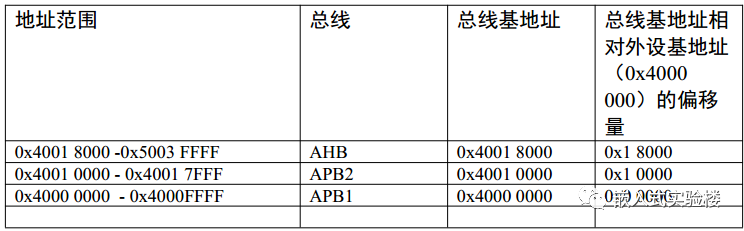
由這個表我們可以知道,stm32f10x.h 這個文件中必然含有用于定義總線外設(shè)基地址的宏。
#define APB2PERIPH_BASE PERIPH_BASE
因為偏移量為零,所以 APB2的地址直接就等于外設(shè)基地址。
最后到了宏 GPIOB_BASE,宏展開為 APB2PERIPH_BASE (APB2 總線外設(shè)的基地址)加上相對 APB2 總線外設(shè)基地址的偏移量 0xC00 得到了 GPIOB端口的寄存器組的基地址。 這個所謂的寄存器組又是什么呢? 它包括什么寄存器?
細看 stm32f10x.h 文件,我們還可以發(fā)現(xiàn)有關(guān)各個 GPIO 基地址的宏。
#define GPIOA_BASE(APB2PERIPH_BASE + 0x0800)
#define GPIOB_BASE(APB2PERIPH_BASE + 0x0C00)
#define GPIOC_BASE(APB2PERIPH_BASE + 0x1000)
#define GPIOD_BASE(APB2PERIPH_BASE + 0x1400)
除了 GPIOB寄存器組的地址,還有 GPIOA、GPIOC和 GPIOD 的地址,并且這些地址是不一樣的。 前面提到,每組 GPIO 都對應(yīng)著獨立的一組寄存器,查看 STM32 的數(shù)據(jù)手冊。
注意到這個說明中有一個偏移地址:0x04,這里的偏移地址是相對哪個地址的偏移呢? 下面進行舉例說明。
對于GPIOB組的寄存器,GPIOB含有的端口配置高寄存器(GPIOB_CRH地址為:GPIOB_BASE +0x04。 假如是 GPIOA 組的寄存器,則 GPIOA 含有的端口配置高寄存器(GPIOA_CRH)地址為:GPIOA_BASE+0x04。 也就是說,這個偏移地址,就是該寄存器相對所在寄存器組基地址的偏移量。
2.4固件庫對寄存器的封裝
ST的工程師用結(jié)構(gòu)體的形式封裝了寄存器組,在 stm32f10x.h 文件定義的。
#define GPIOA ((GPIO_TypeDef *)GPIOA_BASE)
#define GPIOB ((GPIO_TypeDef *)GPIOB_BASE)
#define GPIOC ((GPIO_TypeDef *)GPIOC_BASE)
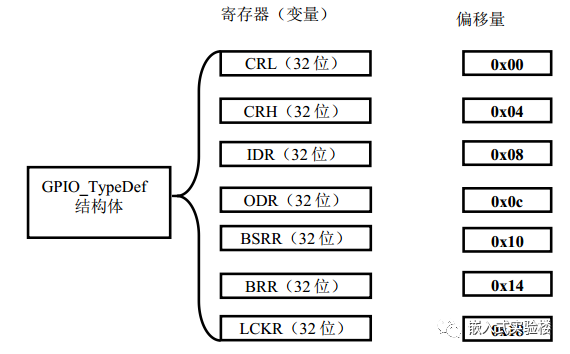
有了這些宏,我們就可以定位到具體的寄存器地址,結(jié)構(gòu)體GPIO_TypeDef在 stm32f10x.h 文件中定義的。
typedef struct
{
__IO uint32_t CRL;
__IO uint32_t CRH;
__IO uint32_t IDR;
__IO uint32_t ODR;
__IO uint32_t BSRR;
__IO uint32_t BRR;
__IO uint32_t LCKR;
} GPIO_TypeDef;
結(jié)構(gòu)體內(nèi)又定義了 7 個 __IO uint32_t 類型的變量。 這些變量都是 32 位,即每個變量占內(nèi)存空間 4 個字節(jié)。 在 C 語言中,結(jié)構(gòu)體內(nèi)變量的存儲空間是連續(xù)的,也就是說假如我們定義了一個 GPIO_TypeDef ,這個結(jié)構(gòu)體的首地址(變量 CRL 的地址)若為 0x40011000,那么結(jié)構(gòu)體中第二個變量(CRH)的地址即為 0x40011000 +0x04, 加上的0x04 正是代表 4 個字節(jié)地址的偏移量。
0x04 偏移量正是 GPIOx_CRH 寄存器相對于所在寄存器組的偏移地址。 同理,GPIO_TypeDef 結(jié)構(gòu)體內(nèi)其他變量的偏移量,也與相應(yīng)的寄存器偏移地址相符。 于是,只要我們匹配了結(jié)構(gòu)體的首地址,就可以確定各寄存器的具體地址了。
GPIOA_BASE 在前文已解析,是一個代表 GPIOA組寄存器的基地址。“(GPIO_TypeDef *)”在這里的作用則是把 GPIOA_BASE 地址轉(zhuǎn)換為 GPIO_TypeDef結(jié)構(gòu)體指針類型。有了這樣的宏,以后我們寫代碼的時候,如果要修改GPIO 的寄存器,就可用修改以下代碼的方式來實現(xiàn)。
GPIO_TypeDef * GPIOx; //定義一個 GPIO_TypeDef 型結(jié)構(gòu)體指針 GPIOx
GPIOx = GPIOA; //把指針地址設(shè)置為宏 GPIOA 地址
GPIOx->CRL = 0xffffffff; //通過指針訪問并修改 GPIOA_CRL 寄存器
通過類似的方式,我們就可以給具體的寄存器寫上適當(dāng)?shù)膮?shù)以控制 STM32 了。這樣我們就可以通過庫函數(shù)實現(xiàn)了GPIO的初始化了。
/**
* @brief 初始化LED的GPIO
* @param None
* @retval None
*/
void LED_GPIO_Config(void)
{
/*定義一個GPIO_InitTypeDef類型的結(jié)構(gòu)體*/
GPIO_InitTypeDefGPIO_InitStructure;
/*開啟LED的外設(shè)時鐘*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB|RCC_APB2Periph_GPIOG, ENABLE);
/*設(shè)置IO口*/
GPIO_InitStructure.GPIO_Mode= GPIO_Mode_Out_PP; //設(shè)置引腳模式為通用推挽輸出
GPIO_InitStructure.GPIO_Speed= GPIO_Speed_50MHz; //設(shè)置引腳速率為50MHz
/*調(diào)用庫函數(shù),初始化GPIOB0*/
GPIO_InitStructure.GPIO_Pin= GPIO_Pin_0; //選擇要控制的GPIOB引腳
GPIO_Init(GPIOB,&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin= GPIO_Pin_6|GPIO_Pin_7;/*選擇要控制的引腳*/
GPIO_Init(GPIOG,&GPIO_InitStructure);
/*開啟所有l(wèi)ed燈 */
GPIO_SetBits(GPIOB,GPIO_Pin_0);
GPIO_SetBits(GPIOG,GPIO_Pin_6|GPIO_Pin_7);
}
當(dāng)然啦,上述代碼包含了時鐘的使能。
通過對時鐘和GPIO的分析,我想大家已經(jīng)對固件的邏輯有了一定的認識,從本質(zhì)上講,都是在配置寄存器,只是地址和值不同罷了,而固件庫就是對寄存器配置的封裝,便于開發(fā)者調(diào)用。
當(dāng)然啦,本文是基于標(biāo)準(zhǔn)庫分析,HAL庫的邏輯也是一樣的,只是HAL功能更完善,封裝更徹底,后面也會詳細分析HAL庫的調(diào)用邏輯。
小貼士
1.assert_param
在STM32的固件庫和提供的例程中,到處都可以見到assert_param()的使用。如果打開任何一個例程中的stm32f10x_conf.h文件,就可以看到實際上assert_param是一個宏定義;在固件庫中,它的作用就是檢測傳遞給函數(shù)的參數(shù)是否是有效的參數(shù)。
所謂有效的參數(shù)是指滿足規(guī)定范圍的參數(shù),比如某個參數(shù)的取值范圍只能是小于3的正整數(shù),如果給出的參數(shù)大于3,則這個assert_param()可以在運行的程序調(diào)用到這個函數(shù)時報告錯誤,使程序員可以及時發(fā)現(xiàn)錯誤,而不必等到程序運行結(jié)果的錯誤而大費周折。這是一種常見的軟件技術(shù),可以在調(diào)試階段幫助程序員快速地排除那些明顯的錯誤。它確實在程序的運行上犧牲了效率(但只是在調(diào)試階段),但在項目的開發(fā)上卻幫助你提高了效率。
當(dāng)你的項目開發(fā)成功,使用release模式編譯之后,或在stm32f10x_conf.h文件中注釋掉對USE_FULL_ASSERT的宏定義,所有的assert_param()檢驗都消失了,不會影響最終程序的運行效率。在執(zhí)行assert_param()的檢驗時,如果發(fā)現(xiàn)參數(shù)出錯,它會調(diào)用函數(shù)assert_failed()向程序員報告錯誤,在任何一個例程中的main.c中都有這個函數(shù)的模板,如下:
void assert_failed(uint8_t*file, uint32_t line)
{
while (1)
{}
}
你可以按照自己使用的環(huán)境需求,添加適當(dāng)?shù)恼Z句輸出錯誤的信息提示,或修改這個函數(shù)做出適當(dāng)?shù)腻e誤處理。
1、STM32F10xD.LIB是DEBUG模式的庫文件。
2、STM32F10xR.LIB是Release模式的庫文件。
3、要選擇DEBUG和RELEASE模式,需要修改stm32f10x_conf.h的內(nèi)容。#define DEBUG 表示DEBUG模式,把該語句注釋掉,則為RELEASE模式。
4、要選擇DEBUG和RELEASE模式,也可以在Options,C/C++,Define里填入DEBUG的預(yù)定義。這樣,就不需要修改stm32f10x_conf.h的內(nèi)容。
5、如果把庫加入項目,則不需要將ST的庫源文件加入項目,比較方便。但是,庫的選擇要和DEBUG預(yù)定義對應(yīng)。
2.__I、 __O 、__IO的含義
這是ST庫里面的宏定義,定義如下:
#define __I volatile const /*!< defines 'read only' permissions */
#define __O volatile /*!< defines 'write only'permissions */
#define __IO volatile /*!
顯然,這三個宏定義都是用來替換成 volatile 和 const 的,所以我們先要了解這兩個關(guān)鍵字的作用:
__I :輸入口。既然是輸入,那么寄存器的值就隨時會外部修改,那就不能進行優(yōu)化,每次都要重新從寄存器中讀取。也不能寫,即只讀,不然就不是輸入而是輸出了。
__O :輸出口,也不能進行優(yōu)化,不然你連續(xù)兩次輸出相同值,編譯器認為沒改變,就忽略了后面那一次輸出,假如外部在兩次輸出中間修改了值,那就影響輸出。
__IO:輸入輸出口,同上
為什么加下劃線?
原因是:避免命名沖突
一般宏定義都是大寫,但因為這里的字母比較少,所以再添加下劃線來區(qū)分。這樣一般都可以避免命名沖突問題,因為很少人這樣命名,這樣命名的人肯定知道這些是有什么用的。
經(jīng)常寫大工程時,都會發(fā)現(xiàn)老是命名沖突,要不是全局變量沖突,要不就是宏定義沖突,所以我們要盡量避免這些問題,不然出問題了都不知道問題在哪里。
-
mcu
+關(guān)注
關(guān)注
146文章
16992瀏覽量
350310 -
ARM
+關(guān)注
關(guān)注
134文章
9046瀏覽量
366817 -
寄存器
+關(guān)注
關(guān)注
31文章
5317瀏覽量
120008 -
流水燈
+關(guān)注
關(guān)注
21文章
432瀏覽量
59637 -
GPIO
+關(guān)注
關(guān)注
16文章
1196瀏覽量
51917
發(fā)布評論請先 登錄
相關(guān)推薦
GD32開發(fā)實戰(zhàn)指南(基礎(chǔ)篇) 第3章 GPIO流水燈的前世今生
ARM Cortex-M學(xué)習(xí)筆記:初識GPIO流水燈
ARM Cortex-M學(xué)習(xí)筆記:初識Systick定時器
ARM Cortex-M堆棧機制介紹
ARM Cortex-M內(nèi)核的相關(guān)資料推薦
ARM Cortex-M開發(fā)之初識GPIO流水燈
Arm Cortex-M處理器—Cortex-M85介紹
ARM Cortex-M 系列微控制器(ST)
Atmel Studio 6軟件中如何調(diào)試ARM Cortex-M
米爾科技Cortex-M Prototyping System +介紹
[STM32CubeMX]學(xué)習(xí)筆記1:GPIO輸出LED流水燈
![[STM32CubeMX]<b class='flag-5'>學(xué)習(xí)</b><b class='flag-5'>筆記</b>1:<b class='flag-5'>GPIO</b>輸出LED<b class='flag-5'>流水燈</b>](https://file.elecfans.com/web1/M00/D9/4E/pIYBAF_1ac2Ac0EEAABDkS1IP1s689.png)
敏矽微電子Cortex-M0學(xué)習(xí)筆記04——GPIO詳解及應(yīng)用實例





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論