") 慣性測(cè)量單元 (IMU) 探秘
慣性測(cè)量單元 (IMU) 探秘
我的童年是很久以前的事了。那時(shí)候沒(méi)有手持電子產(chǎn)品,沒(méi)有視頻游戲,也沒(méi)有便攜式設(shè)備。與現(xiàn)在不同,那是個(gè)玩培樂(lè)多、橡皮泥、神奇8號(hào)球、飛盤(pán)和妙妙圈的年代。我記憶最深刻的是美泰旋轉(zhuǎn)球。它本質(zhì)上是一個(gè)陀螺儀,盒子里裝有一個(gè)旋轉(zhuǎn)輪,是一種將陀螺介紹給現(xiàn)代兒童的玩具。這個(gè)陀螺玩具使用了超級(jí)旋轉(zhuǎn)的高科技軸承,使頂部能夠以非常高的速度旋轉(zhuǎn),因此它能長(zhǎng)時(shí)間保持直立狀態(tài)。我耳邊似乎還縈繞著它發(fā)出的聲音,我讓它加速,使陀螺高速旋轉(zhuǎn)起來(lái),然后松手,看它在地板上四處自由旋轉(zhuǎn)。
這個(gè)陀螺是一個(gè)改進(jìn)的陀螺儀。由于角動(dòng)量守恒,陀螺儀在旋轉(zhuǎn)時(shí)會(huì)保持直立(牛頓 (1687)、拉普拉斯 (1799)、福柯 (1852)、蘭金 (1858) 等)。由于這種現(xiàn)象,陀螺儀可用于測(cè)量或保持方向和角速度。
今天的現(xiàn)代電子設(shè)計(jì)已經(jīng)采用了這種機(jī)械知識(shí)并將其制成傳感器。這類(lèi)傳感器可采用微機(jī)電系統(tǒng) (MEMS) 進(jìn)行制造。傳感器技術(shù)可實(shí)現(xiàn)傳感器融合,從而將多個(gè)傳感器和軟件解決方案打包成一個(gè)整體。因此,它有助于為各種大型行業(yè)提供解決方案,適用領(lǐng)域包括信息和通信技術(shù) (ICT)、物聯(lián)網(wǎng)(IoT) 及汽車(chē)。半導(dǎo)體制造商校準(zhǔn)這些集成解決方案,并充分利用嵌入式補(bǔ)償和傳感器處理,以及簡(jiǎn)單的可編程接口。
TDK InvenSense目前走在了人性化MEMS傳感器技術(shù)的前沿。InvenSense隸屬TDK集團(tuán)內(nèi)部Sensor System Business Company旗下。它主要面向消費(fèi)、工業(yè)、汽車(chē)和物聯(lián)網(wǎng)細(xì)分市場(chǎng),是這些市場(chǎng)運(yùn)動(dòng)、音頻和壓力MEMS解決方案的知名領(lǐng)先企業(yè)。憑借其強(qiáng)大的MEMS 3/6/7/9軸運(yùn)動(dòng)傳感器產(chǎn)品組合以及性能出色的MEMS音頻麥克風(fēng)和壓力傳感器,TDK繼續(xù)突破性能和質(zhì)量的極限,為眾多行業(yè)樹(shù)立了新的創(chuàng)新標(biāo)準(zhǔn)。讓我們來(lái)看看TDK InvenSense的MEMS慣性測(cè)量單元 (IMU) 如何幫助設(shè)計(jì)工程師對(duì)物體的位置了然于胸。
IMU
MEMS技術(shù)能夠?qū)⒕芡勇輧x、加速度計(jì)、磁力計(jì)和壓力傳感器的多軸組合組裝到一個(gè)設(shè)備中。采用這些類(lèi)型傳感器的集成器件通常稱為慣性測(cè)量單元 (IMU)。IMU是一種電子器件,用于測(cè)量和報(bào)告物體的比力、角速,通常也包括物體的運(yùn)動(dòng)方向。艾薩克·牛頓 (1642–1726/27) 將慣性描述為第一運(yùn)動(dòng)定律(《自然哲學(xué)的數(shù)學(xué)原理》,1687),他是這樣說(shuō)的:“任何物體都會(huì)保持勻速直線運(yùn)動(dòng)或靜止?fàn)顟B(tài),直到外力迫使它改變運(yùn)動(dòng)狀態(tài)為止。” MEMS技術(shù)即使在高度復(fù)雜的應(yīng)用和不斷變化的情況下也能可靠檢測(cè)和處理多自由度 (DoF)。
多自由度
選擇IMU的一項(xiàng)重要標(biāo)準(zhǔn)就是自由度。IMU通常具有2到10個(gè)自由度。
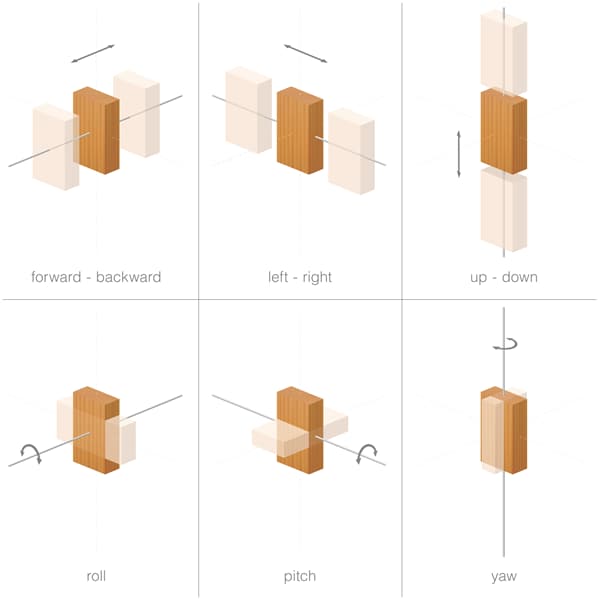
“自由”一詞在不同的語(yǔ)境中有不同的含義。在本例中,我們不是在談?wù)搨€(gè)人選擇的自由或政治自由,而是在物理學(xué),特別是力學(xué)背景下的自由。在力學(xué)中,自由度對(duì)應(yīng)于定義其配置或狀態(tài)的平移分量和旋轉(zhuǎn)。例如,對(duì)于空間中的剛體,平移和旋轉(zhuǎn)都有三個(gè)分量,總共產(chǎn)生六個(gè)自由度(圖2)。
平移:上/下
平移:左/右
平移:前/后
旋轉(zhuǎn):左/右(偏擺)
旋轉(zhuǎn):從一側(cè)到另一側(cè)(滾翻)
旋轉(zhuǎn):前/后(俯仰)
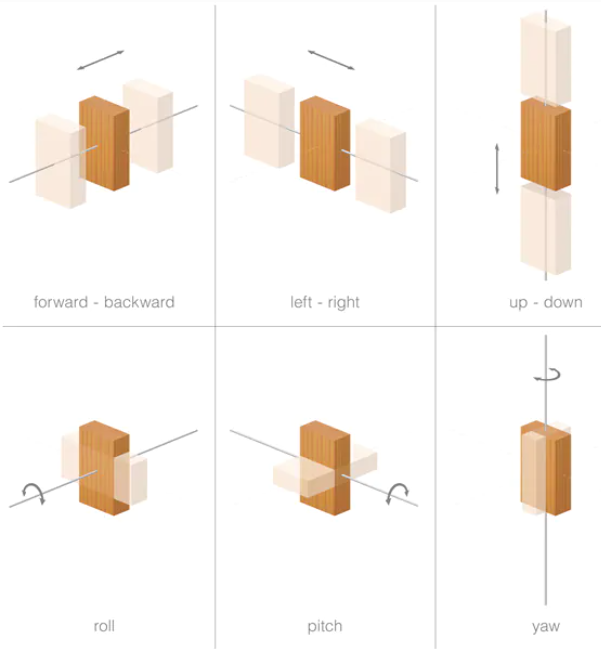
圖2:六個(gè)自由度。剛體在3D空間中的運(yùn)動(dòng)可能性。向前、向后、向左、向右、向上和向下,再加上繞三個(gè)軸的旋轉(zhuǎn)。(圖源:Peter Hermes Furian/Shutterstock.com)
加速度計(jì)(測(cè)量速度變化 → 獲取位置)和陀螺儀(測(cè)量角速度 → 獲取方向)可以結(jié)合起來(lái)收集信息,使設(shè)備能夠計(jì)算多達(dá)六個(gè)自由度。那么,超過(guò)六個(gè)自由度的想法是如何產(chǎn)生的? IMU供應(yīng)商已經(jīng)發(fā)現(xiàn),如果他們采用進(jìn)一步的傳感器融合,便可以獲得更優(yōu)秀的性能。他們?cè)黾恿艘粋€(gè)傳感器,從而改進(jìn)讀數(shù)、減少誤差并獲得更加令人信服的數(shù)據(jù)來(lái)支持內(nèi)部調(diào)整和補(bǔ)償。加入磁力計(jì)可提供新的傳感器信息。磁力計(jì)感應(yīng)地球磁場(chǎng),提供數(shù)據(jù),從而獲得航向。當(dāng)這些信息與加速度計(jì)和陀螺儀的傳感器融合時(shí),傳感器制造商表示它們能額外提供三個(gè)自由度。從而,九自由度IMU就誕生了。
需要明確一下,這里有點(diǎn)術(shù)語(yǔ)上的混淆。從技術(shù)上講,物理學(xué)定義了六個(gè)自由度。然而,IMU設(shè)備在傳感器融合方案中的三個(gè)獨(dú)立軸上使用三個(gè)不同的傳感器,為解決方案帶來(lái)了九項(xiàng)傳感器輸入。
之前我說(shuō)過(guò)有一些IMU有10個(gè)自由度。我只解釋了九個(gè)。那么傳感器是如何實(shí)現(xiàn)10個(gè)自由度的?
很簡(jiǎn)單,再加入一個(gè)傳感器。在本例中,加入氣壓傳感器將提供更多信息。現(xiàn)在,結(jié)合氣壓傳感器即可實(shí)現(xiàn)IMU制造商所說(shuō)的10個(gè)自由度:
-3自由度加速度計(jì)
-3自由度陀螺儀
-3自由度磁力計(jì)
-1自由度氣壓表(測(cè)量壓力)
-10個(gè)自由度
結(jié)論
與我的眾多兒時(shí)玩具不同,現(xiàn)代電子產(chǎn)品需要越來(lái)越多的傳感器。傳感器融合結(jié)合了多種傳感器和軟件解決方案,可實(shí)現(xiàn)信息通信技術(shù)、物聯(lián)網(wǎng)和汽車(chē)新應(yīng)用。您已經(jīng)了解了IMU如何將眾多傳感器組合成一個(gè)集成的單片設(shè)備。就像陀螺一樣,我希望我已經(jīng)為您揭秘了TDK InvenSense能夠提供理想選擇,讓您在下一個(gè)設(shè)計(jì)中意識(shí)到IMU的優(yōu)點(diǎn)。
審核編輯:郭婷
-
傳感器
+關(guān)注
關(guān)注
2548文章
50740瀏覽量
752148 -
mems
+關(guān)注
關(guān)注
129文章
3903瀏覽量
190377 -
物聯(lián)網(wǎng)
+關(guān)注
關(guān)注
2904文章
44306瀏覽量
371473
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
貿(mào)澤電子推出Bosch的BMI270 智能慣性測(cè)量單元(IMU)
3DM-GX5-15 慣性測(cè)試單元IMU
基于MEMS技術(shù)的IMU慣性測(cè)量單元的工作原理解析
關(guān)于IMU慣性測(cè)量單元的詳細(xì)簡(jiǎn)析
詳細(xì)解說(shuō)IMU慣性測(cè)量單元的定義以及原理
IMU慣性測(cè)量單元是什么?
InvenSense慣性測(cè)量單元IMU_MPU6050中文數(shù)據(jù)手
使用arduino/genuino 101的板載慣性測(cè)量單元(IMU)教程

MEMS慣性測(cè)量單元(IMU)SCHA634產(chǎn)品分析






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論