 雷達模塊底噪檢測功能作用與使用
雷達模塊底噪檢測功能作用與使用
雷達模塊在日常生活中的使用,難免會受到環境因素的干擾。在不同的使用的場景下,用戶需要根據產品所處環境來自定義設置雷達模塊的參數。
雖然HLK-LD2410B/2410C的干擾性很強,但是由于使用環境的多樣性以及參數調節不當等問題,還是會存在少量的環境干擾,產生誤觸。如模塊直面空調、窗簾、風扇、綠植等,因為如果這些物體的擺動可能引起模塊誤識別。
為了更好地減少環境干擾和模塊誤觸等問題,HLK-LD2410B/2410C兩款模塊推出了底噪檢測功能。
HLK-LD2410B/2410C模塊在調參之前,先對模塊的使用環境進行一個初步的環境檢測,給出運動感應和微動感應的能量參考值,用戶基于這一參考值再去調節運動能量值、靜止能量值和感應距離等參數,從而達到最佳檢測效果,減少環境干擾的影響。
底噪檢測是什么?
底噪檢測本質上就是在用戶調節靈敏度和感應范圍等參數之前,先對使用環境進行一次檢測,輸出初始的運動能量值、靜止能量值,其中包括最大值、最小值和平均值。
底噪檢測的作用
如窗簾無意間被風吹動產生的運動,在雷達模塊檢測到后誤識別成有人,就容易造成誤觸。為了減少這個誤觸,先在無人環境下進行底噪檢測,然后再設置參數。
假設檢測在某一場景中底噪檢測的運動能量平均值為35,那么將運動能量值設為35,可以在一定程度上屏蔽掉窗簾開關等環境干擾因素,減少誤判,提高精準度。
底噪檢測的使用
底噪檢測是在模塊上電之后,通過藍牙連接到APP(HLKRadar Tool ),在APP上進行調參之前,先開始底噪檢測,輸出檢測到的初始環境值,用戶再根據初始環境值來進行調參。
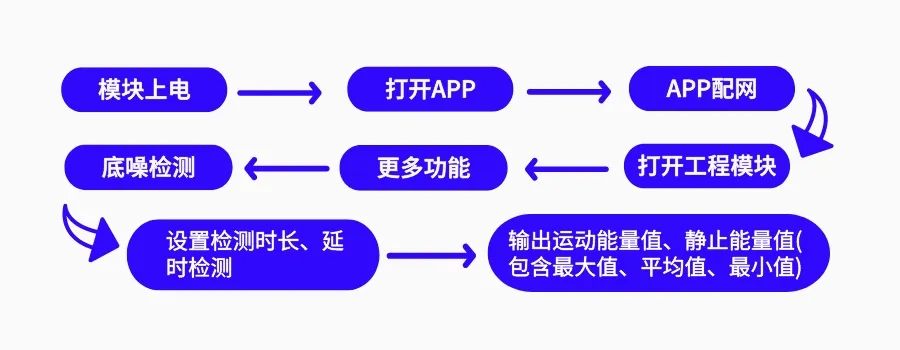
底噪檢測中的初始環境值,建議在無人環境下進行,檢測范圍在0.75-6米,距離和檢測范圍的參數設置對底噪檢測功能無效,模塊自動按照默認距離門和檢測范圍進行底噪檢測。
用戶可自定義設置檢測時長和延時檢測,檢測時長越長精準度越高,檢測完成后,輸出環境中運動能量值和靜止能量值的最大值、最小值、平均值,用戶可根據對應的底噪檢測參考值設置參數。
HLK-LD2410B/2410C最遠感應距離為可達6米,探測角度可達±60度。模塊可分級調參,每距離門0.2m或0.75m可選,最大8個距離門。
同時,模塊自帶藍牙功能,支持APP和上位機調參,可設置光敏固件,新增底噪檢測功能后,模塊在高性能高性價比的基礎上,抗干擾能力能力更強,運用于人體感應燈控、廣告屏等設備的人體感應喚醒、生命安全防護、智能家居、智能家電等場景中效果更佳。
編輯:黃飛
-
藍牙
+關注
關注
114文章
5767瀏覽量
169812 -
雷達
+關注
關注
50文章
2901瀏覽量
117324
原文標題:LD2410B新增底噪檢測功能 提高抗干擾能力和減少誤觸
文章出處:【微信號:HLK_WULIAN,微信公眾號:海凌科智慧物聯】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論