 OpenHarmony Docker移植實踐
OpenHarmony Docker移植實踐
點擊藍字 ╳ 關注我們
開源項目 OpenHarmony是每個人的 OpenHarmonyDocker簡介
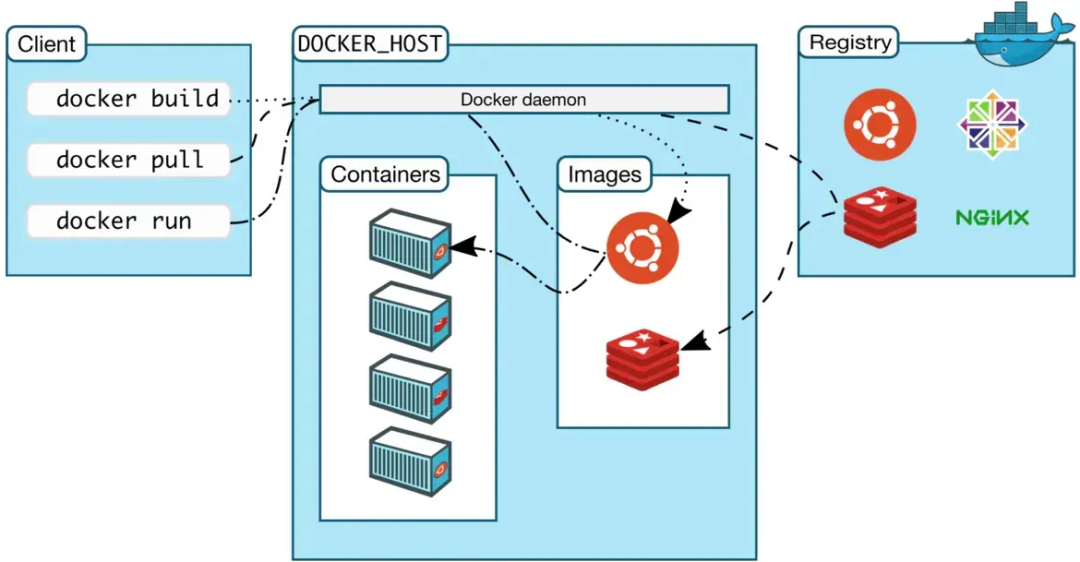
從操作系統誕生之日起,虛擬化技術就不斷的演進與發展,結合目前云原生的發展態勢,容器無疑是其中的重要一環。 Docker是一個開源的軟件項目,可以在Linux操作系統上提供一層額外的抽象,讓用戶程序部署在一個相對隔離的運行環境,并提供自動管理機制。 需要額外指出的是,Docker并不等于容器(containers),Docker只是容器的一種,其他種類的容器還有Kata container,Rocket container等。編譯環境搭建
準備一個可以運行Docker的虛擬機操作系統,推薦ubuntu或者openEuler的發行版。搭建環境[1]:在ubuntu虛擬機上執行以下步驟,下載OpenAtom OpenHarmony(簡稱“OpenHarmony”)的源碼并部署Docker編譯環境。1、安裝gitee repo工具[2]
mkdir ~/bin
curl https://gitee.com/oschina/repo/raw/fork_flow/repo-py3 -o ~/bin/repo
chmod a+x ~/bin/repo
pip3install-ihttps://repo.huaweicloud.com/repository/pypi/simplerequests
2、獲取OpenHarmony源碼(1)在ubuntu虛擬機上創建源碼目錄:
mkdir /home/openharmony
cd/home/openharmory
(2)使用repo命令獲取OpenHarmony v3.2 release源碼:
repo init -u git@gitee.com:openharmony/manifest.git -b OpenHarmony-3.2-Release --no-repo-verify
repo sync -c
repoforall-c'gitlfspull'
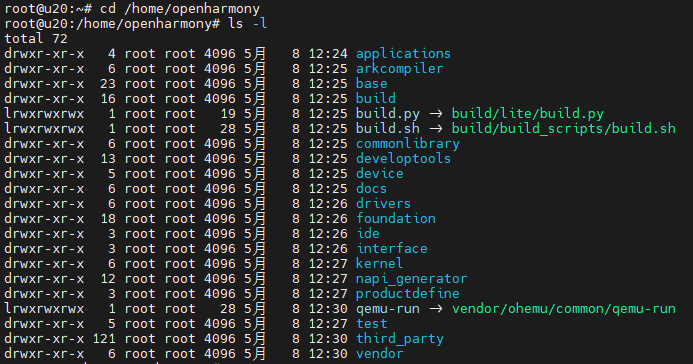
以上步驟完成后,可以獲取到OpenHarmony編譯所需的完整的源碼,代碼目錄結構如下圖所示:
 ?3、獲取Docker編譯環境獨立Docker編譯環境,適用于編譯輕量和小型系統/標準系統.[3]
(1)獲取OpenHarmony Docker編譯鏡像
?3、獲取Docker編譯環境獨立Docker編譯環境,適用于編譯輕量和小型系統/標準系統.[3]
(1)獲取OpenHarmony Docker編譯鏡像
dockerpullswr.cn-south-1.myhuaweicloud.com/openharmony-docker/openharmony-docker:1.0.0
此Docker編譯環境較大,請耐心等待下載完成。
(2)進入源碼根目錄,啟動并進入Docker編譯環境。執行以下命令:
cd /home/openharmory
dockerrun--nameohos_build-it-v$(pwd):/home/openharmonyswr.cn-south-1.myhuaweicloud.com/openharmony-docker/openharmony-docker:1.0.0
命令參數說明:-v X:Y 將宿主機的X目錄掛載到容器的Y目錄下。將當前源碼所在目錄,掛載到容器編譯環境的/home/openharmony目錄下。
(3)安裝編譯依賴通過步驟(2)進入容器的shell后,切換到/home/openharmony路徑,執行腳本下載OpenHarmony編譯所依賴的組件:
cd /home/openharmony
./build/prebuilts_download.sh
此處需要下載的編譯依賴較多,請耐心等待下載完成。
至此OpenHarmony Docker編譯環境準備完畢,在執行編譯動作之前,需要完成OpenHarmony kernel特性的修改,否則Docker無法在OpenHarmony系統上正常運行。
kernel配置修改
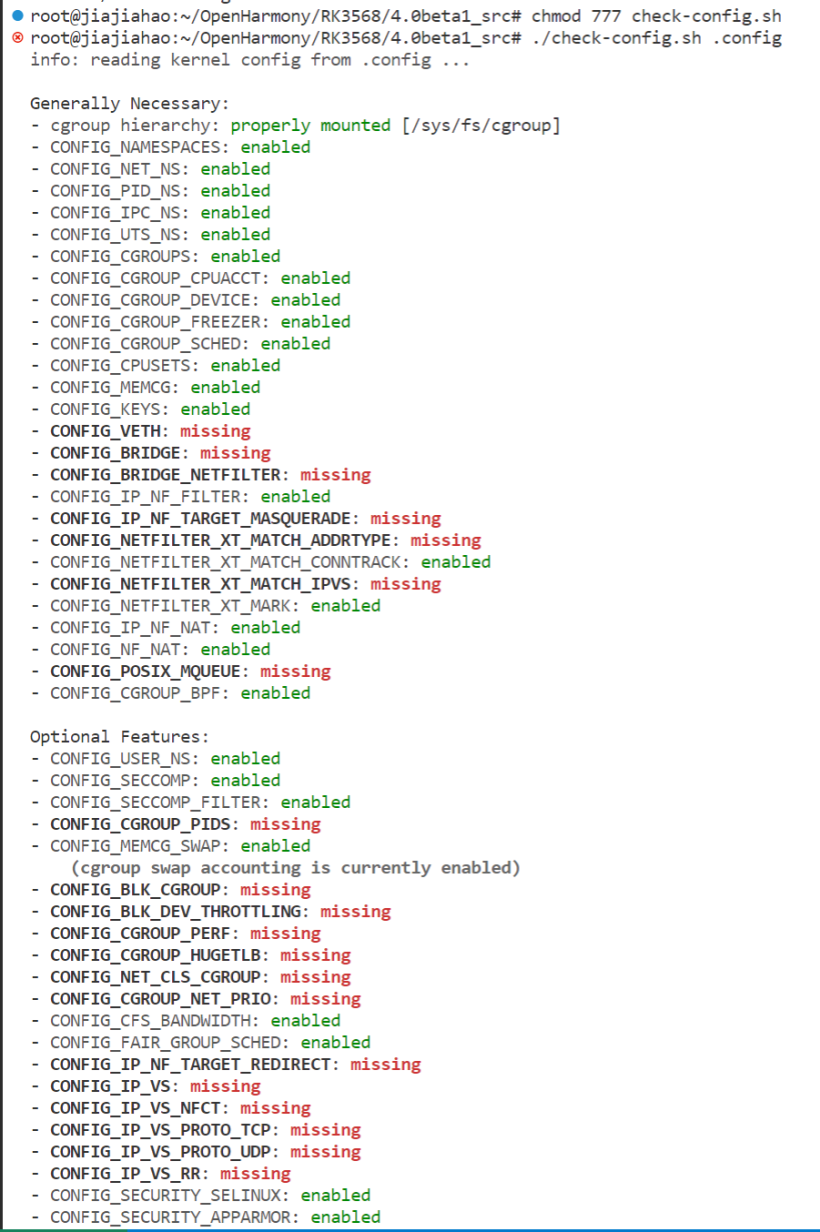
如何判斷源碼使用默認配置編譯后生成的kernel是否滿足Docker的運行依賴呢?開源社區存在檢查工具,可以幫助我們完成這個任務,大家可以自行獲取此工具[4]。在此我們直接進入kernel配置的修改環節。 1、修改OpenHarmony kernel配置文件,開啟Docker運行所依賴的內核功能。需要修改的配置文件位置如下:
kernel/linux/config/linux-5.10/arch/arm64/configs/rk3568_standard_defconfig
針對kernel特性的修改,主要是開啟OpenHarmony內核中namespace、cgroup、network、overlay filesystem等功能。在配置文件的末尾追加以下內容:
# add for Docker
CONFIG_POSIX_MQUEUE=y
CONFIG_SCHED_WALT=y
CONFIG_PSI=y
CONFIG_PAGE_COUNTER=y
CONFIG_CGROUP_BPF=y
CONFIG_MEMCG_KMEM=y
CONFIG_MEMCG_SWAP_ENABLED=y
CONFIG_BLK_CGROUP=y
CONFIG_BLK_DEV_THROTTLING=y
CONFIG_RT_GROUP_SCHED=y
CONFIG_CGROUP_PIDS=y
CONFIG_CGROUP_HUGETLB=y
CONFIG_CGROUP_PERF=y
CONFIG_NET_CLS_CGROUP=y
CONFIG_BPF_SYSCALL=y
CONFIG_BINFMT_MISC=y
CONFIG_TLS=y
CONFIG_IP_MULTIPLE_TABLES=y
CONFIG_IP_MROUTE_MULTIPLE_TABLES=y
CONFIG_INET_ESP=y
CONFIG_IPV6_MIP6=y
CONFIG_IPV6_MULTIPLE_TABLES=y
CONFIG_IPV6_MROUTE=y
CONFIG_IPV6_MROUTE_MULTIPLE_TABLES=y
CONFIG_NF_CONNTRACK=y
CONFIG_NETFILTER_XT_MARK=y
CONFIG_NETFILTER_XT_SET=y
CONFIG_NETFILTER_XT_TARGET_CHECKSUM=y
CONFIG_NETFILTER_XT_MATCH_ADDRTYPE=y
CONFIG_NETFILTER_XT_MATCH_CONNTRACK=y
CONFIG_NETFILTER_XT_MATCH_IPVS=y
CONFIG_NETFILTER_XT_MATCH_CGROUP=y
CONFIG_IP_SET=y
CONFIG_IP_SET_HASH_IP=y
CONFIG_IP_SET_HASH_NET=y
CONFIG_IP_VS=y
CONFIG_IP_VS_NFCT=y
CONFIG_IP_VS_PROTO_TCP=y
CONFIG_IP_VS_PROTO_UDP=y
CONFIG_IP_VS_RR=y
CONFIG_IP_VS_WRR=y
CONFIG_IP_VS_SH=y
CONFIG_IP_NF_MATCH_STATE=y
CONFIG_IP_NF_MATCH_LIMIT=y
CONFIG_IP_NF_TARGET_LOG=y
CONFIG_NF_NAT=y
CONFIG_IP_NF_FTP=y
CONFIG_IP_NF_TARGET_REDIRECT=y
CONFIG_IP_NF_CONNTRACK=y
CONFIG_IP_NF_IRC=y
CONFIG_IP_NF_NAT=y
CONFIG_IP_NF_FILTER=y
CONFIG_IP_NF_TARGET_MASQUERADE=y
CONFIG_BRIDGE=y
CONFIG_BRIDGE_NETFILTER=y
CONFIG_CGROUP_NET_PRIO=y
CONFIG_STREAM_PARSER=y
CONFIG_DRIVERS_HDF_LIGHT=y
CONFIG_HYPERHOLD=y
CONFIG_HYPERHOLD_DEBUG=y
CONFIG_HYPERHOLD_ZSWAPD=y
CONFIG_HYPERHOLD_FILE_LRU=y
CONFIG_HYPERHOLD_MEMCG=y
CONFIG_ZRAM_GROUP=y
CONFIG_ZRAM_GROUP_DEBUG=y
CONFIG_ZLIST_DEBUG=y
CONFIG_ZRAM_GROUP_WRITEBACK=y
CONFIG_REGMAP_SPI=y
CONFIG_MACVLAN=y
CONFIG_VXLAN=y
CONFIG_AUFS_FS=y
CONFIG_VETH=y
CONFIG_DRM_DW_HDMI_I2S_AUDIO=y
CONFIG_SND_TIMER=y
CONFIG_SND_PCM=y
CONFIG_SND_PCM_ELD=y
CONFIG_SND_PCM_IEC958=y
CONFIG_SND_DMAENGINE_PCM=y
CONFIG_SND_HWDEP=y
CONFIG_SND_SEQ_DEVICE=y
CONFIG_SND_RAWMIDI=y
CONFIG_SND_JACK=y
CONFIG_SND_JACK_INPUT_DEV=y
CONFIG_SND_PCM_TIMER=y
CONFIG_SND_HRTIMER=y
CONFIG_SND_DYNAMIC_MINORS=y
CONFIG_SND_MAX_CARDS=32
CONFIG_SND_PROC_FS=y
CONFIG_SND_VERBOSE_PROCFS=y
CONFIG_SND_SEQUENCER=y
CONFIG_SND_SEQ_DUMMY=y
CONFIG_SND_SEQ_HRTIMER_DEFAULT=y
CONFIG_SND_SEQ_MIDI_EVENT=y
CONFIG_SND_SEQ_MIDI=y
CONFIG_SND_DRIVERS=y
CONFIG_SND_HDA_PREALLOC_SIZE=64
CONFIG_SND_USB=y
CONFIG_SND_USB_AUDIO=y
CONFIG_SND_USB_AUDIO_USE_MEDIA_CONTROLLER=y
CONFIG_SND_SOC=y
CONFIG_SND_SOC_GENERIC_DMAENGINE_PCM=y
CONFIG_SND_SOC_ROCKCHIP=y
CONFIG_SND_SOC_ROCKCHIP_I2S=y
CONFIG_SND_SOC_ROCKCHIP_I2S_TDM=y
CONFIG_SND_SOC_ROCKCHIP_PDM=y
CONFIG_SND_SOC_ROCKCHIP_SPDIF=y
CONFIG_SND_SOC_ROCKCHIP_SPDIFRX=y
CONFIG_SND_SOC_ROCKCHIP_MAX98090=y
CONFIG_SND_SOC_ROCKCHIP_MULTICODECS=y
CONFIG_SND_SOC_ROCKCHIP_RT5645=y
CONFIG_SND_SOC_ROCKCHIP_HDMI=y
CONFIG_SND_SOC_DUMMY_CODEC=y
CONFIG_SND_SOC_HDMI_CODEC=y
CONFIG_SND_SOC_ES7202=y
CONFIG_SND_SOC_ES7243E=y
CONFIG_SND_SOC_ES8311=y
CONFIG_SND_SOC_ES8316=y
CONFIG_SND_SOC_MAX98090=y
CONFIG_SND_SOC_RK3308=y
CONFIG_SND_SOC_RK3328=y
CONFIG_SND_SOC_RK817=y
CONFIG_SND_SOC_RK_CODEC_DIGITAL=y
CONFIG_SND_SOC_RL6231=y
CONFIG_SND_SOC_RT5616=y
CONFIG_SND_SOC_RT5640=y
CONFIG_SND_SOC_RT5645=y
CONFIG_SND_SOC_RT5651=y
CONFIG_SND_SOC_SPDIF=y
CONFIG_SND_SOC_TS3A227E=y
CONFIG_SND_SIMPLE_CARD_UTILS=y
CONFIG_SND_SIMPLE_CARD=y
CONFIG_ANDROID_PARANOID_NETWORK=y
CONFIG_ACCESS_TOKENID=y
CONFIG_F2FS_GRADING_SSR=y
CONFIG_OVERLAY_FS=y
CONFIG_HUGETLBFS=y
CONFIG_HUGETLB_PAGE=y
CONFIG_CRYPTO_SEQIV=y
#end
2、修改OpenHarmony配置文件 build/ohos/images/build_image.py添加Docker運行依賴的目錄:'run', 'var', 'opt', 'usr'。
_dir_list = [
'config', 'dev', 'proc', 'sys', 'updater', 'system', 'vendor', 'data',
'chipset', 'storage', 'mnt', 'tmp', 'sys_prod', 'chip_prod',
'run', 'var', 'opt', 'usr'
]
3、修改OpenHarmony配置文件 base/security/selinux/sepolicy/base/system/file_contexts添加以下內容:
/run urootfs:s0
/var urootfs:s0
/opt urootfs:s0
/usr urootfs:s0
/liburootfs:s0
至此準備工作結束,進入OpenHarmony系統編譯環節。
OpenHarmony編譯
本文以適配觸覺開發板為例,對代碼編譯流程進行說明。在OpenHarmony源碼路徑下,執行以下命令觸發編譯:
./build.sh--product-namerk3568--ccache--jobs$(nproc)
編譯正常結束后,產物存放在以下位置:
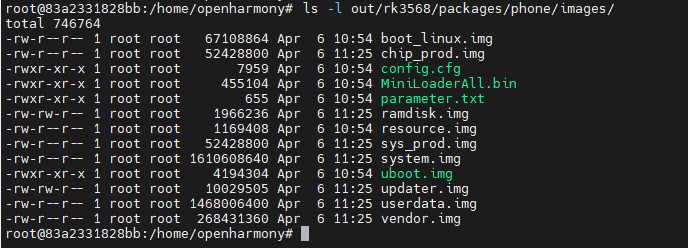 ?接下來就需要將目錄下的產物拷貝到Windows環境,使用開發板廠商提供的燒寫工具完成系統燒寫。說明:清理編譯路徑下已生成的文件,可以執行命令:hb clean命令會清理out路徑下生成的文件。如果要重編內核,需要確認out/kernel路徑被移除,然后重新觸發編譯即可。
?接下來就需要將目錄下的產物拷貝到Windows環境,使用開發板廠商提供的燒寫工具完成系統燒寫。說明:清理編譯路徑下已生成的文件,可以執行命令:hb clean命令會清理out路徑下生成的文件。如果要重編內核,需要確認out/kernel路徑被移除,然后重新觸發編譯即可。
燒寫
燒錄工作需要使用Windows環境,且依賴廠商提供的燒寫工具及驅動助手[5]。 ?1、RK驅動助手解壓后需要執行DriverInstall.exe,完成安裝,否則燒寫工具無法識別到開發板。
2、AndroidTool燒寫工具解壓后直接運行RKDevTool.exe,打開燒錄操作界面,如下圖所示:
?1、RK驅動助手解壓后需要執行DriverInstall.exe,完成安裝,否則燒寫工具無法識別到開發板。
2、AndroidTool燒寫工具解壓后直接運行RKDevTool.exe,打開燒錄操作界面,如下圖所示:
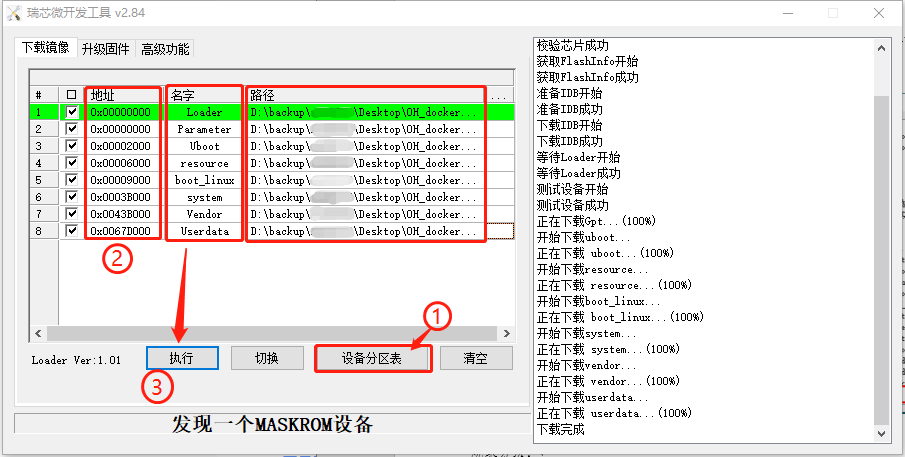 ?燒錄步驟做如下說明:1)在瑞芯微開發工具界面,點擊[設備分區表],讀取設備分區;2)按照設備分區的起始地址修改燒錄項,導入前序步驟生成的img文件;3)點擊[執行]后進入系統燒錄流程。
開發板完成燒錄后,會自動進行重啟。之后可以通過HDC調試工具登錄OpenHarmony shell交互命令行,完成Docker的部署操作。
?燒錄步驟做如下說明:1)在瑞芯微開發工具界面,點擊[設備分區表],讀取設備分區;2)按照設備分區的起始地址修改燒錄項,導入前序步驟生成的img文件;3)點擊[執行]后進入系統燒錄流程。
開發板完成燒錄后,會自動進行重啟。之后可以通過HDC調試工具登錄OpenHarmony shell交互命令行,完成Docker的部署操作。
HDC調試工具
HDC(OpenHarmony Device Connector)[6] 是為開發人員提供的用于設備連接調試的命令行工具,該工具支持部署在Windows/Linux/Mac等系統上與OpenHarmony設備(或模擬器)進行連接調試通信。工具可以通過OpenHarmony官方的每日構建dailybuilds[7]或發布的SDK[8]中獲得,根據使用的系統平臺到相應的toolchains目錄下提取。以SDK為例,解壓后HDC工具路徑如下:
ohos-sdkwindows oolchains-windows-x64-3.2.11.9-Release.zip oolchains
HDC工具的基本使用方法:(在Windows PowerShell中執行命令)
# 進入調試shell
> .hdc.exe shell
# 文件拷貝,從openharmony系統下載文件至Windows的當前目錄下:
> .hdc.exe file recv /data/xxxx .
# 文件拷貝,從windows環境上傳文件到openharmony的/data目錄下:
>.hdc.exefilesend. estfile/data/
Docker環境配置
歷經坎坷,終于到了最后一步Docker部署的環節。通過HDC工具連接到觸覺開發板之后,執行以下步驟。1、執行腳本修改跟目錄的讀寫權限。腳本內容如下:
#!/bin/sh
#remount / to rw property
mount -o remount -rw /
#mount cgroup
mount -t tmpfs -o rw,nosuid,nodev,noexec,mode=755 tmpfs /sys/fs/cgroup
#create related folder
cd /sys/fs/cgroup
mkdir pids cpuset blkio cpu,cpuacct memory devices net_cls,net_prio perf_event
#mount files related cgroup
mount -n -t cgroup -o rw,nosuid,nodev,noexec,relatime,pids cgroup /sys/fs/cgroup/pids
mount -n -t cgroup -o rw,nosuid,nodev,noexec,relatime,cpuset cgroup /sys/fs/cgroup/cpuset
mount -n -t cgroup -o rw,nosuid,nodev,noexec,relatime,blkio cgroup /sys/fs/cgroup/blkio
mount -n -t cgroup -o rw,nosuid,nodev,noexec,relatime,cpu,cpuacct cgroup /sys/fs/cgroup/cpu,cpuacct
mount -n -t cgroup -o rw,nosuid,nodev,noexec,relatime,memory cgroup /sys/fs/cgroup/memory
mount -n -t cgroup -o rw,nosuid,nodev,noexec,relatime,devices cgroup /sys/fs/cgroup/devices
mount -n -t cgroup -o rw,nosuid,nodev,noexec,relatime,net_cls,net_prio cgroup /sys/fs/cgroup/net_cls,net_prio
mount -n -t cgroup -o rw,nosuid,nodev,noexec,relatime,perf_event cgroup /sys/fs/cgroup/perf_event
mount-n-tcgroup-orw,nosuid,nodev,noexec,relatime,freezercgroup/sys/fs/cgroup/freezer
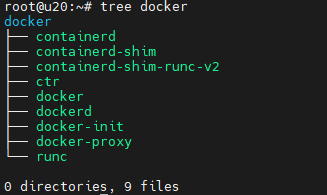
2、部署Docker靜態可執行文件下載Docker靜態可執行文件,當前選用的是20.10.21版本 [9]。使用HDC工具將下載的壓縮包上傳至觸覺開發環境并解壓,將解壓目錄下的文件全部拷貝到/system/bin目錄下即可。解壓后目錄結構如圖所示:
 ?3、創建Docker運行所需的目錄及配置文件
?3、創建Docker運行所需的目錄及配置文件
mkdir /system/etc/docker
mkdir/var/run
創建/system/etc/docker/daemon.json文件,并添加以下文件內容
{
"registry-mirrors":["https://veotnqhz.mirror.aliyuncs.com","https://hub-mirror.c.163.com", "https://mirror.baidubce.com"],
"data-root":"/data/data/dockerdir"
}
4、添加庫別名由于Docker運行時使用的庫與OpenHarmony環境存在的庫名稱不同,需要創建一個軟鏈接別名。
ln-s/lib/ld-musl-arm.so.1/lib/ld-musl-armhf.so.1
5、手動拉起Docker的服務進程
# 拉起dockerd守護進程
dockerd-D-Htcp://0.0.0.0:2375-Hunix:///var/run/docker.sock&
6、驗證Docker基本功能
# 判斷docker命令可以正常執行
docker --verison
# 判斷docker命令可以正常拉取、運行遠端鏡像(前提是網絡可用)
dockerrunhello-world
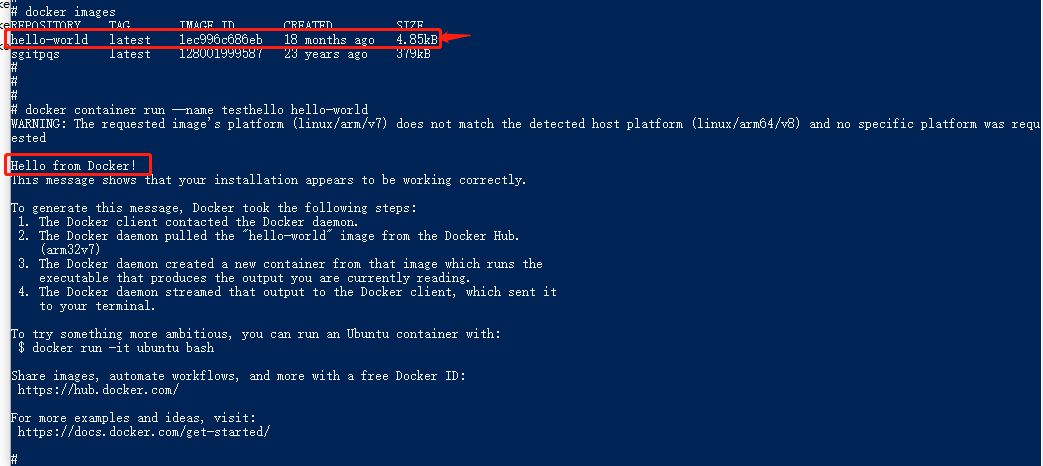 ?至此OpenHarmony上Docker的基本功能已經實現,大家可以嘗試導入或部署自己的Docker應用。
?至此OpenHarmony上Docker的基本功能已經實現,大家可以嘗試導入或部署自己的Docker應用。
參考鏈接
[1]https://gitee.com/openharmony/docs/blob/master/zh-cn/device-dev/get-code/sourcecode-acquire.md[2]
https://gitee.com/help/articles/4316#article-header0
[3]
https://gitee.com/openharmony/docs/blob/master/zh-cn/device-dev/get-code/gettools-acquire.md
[4]
https://github.com/moby/moby/blob/master/contrib/check-config.sh
[5]
https://www.t-firefly.com/doc/download/107.html
[6]
https://gitee.com/openharmony/developtools_hdc
[7]
http://ci.openharmony.cn/dailys/dailybuilds
[8]
https://repo.huaweicloud.com/harmonyos/os/3.2-Release/ohos-sdk-windows_linux-public.tar.gz
[9]
https://download.docker.com/linux/static/stable/aarch64/docker-20.10.21.tgz
原文標題:OpenHarmony Docker移植實踐
文章出處:【微信公眾號:OpenAtom OpenHarmony】歡迎添加關注!文章轉載請注明出處。
-
鴻蒙
+關注
關注
57文章
2321瀏覽量
42749 -
OpenHarmony
+關注
關注
25文章
3665瀏覽量
16161
原文標題:OpenHarmony Docker移植實踐
文章出處:【微信號:gh_e4f28cfa3159,微信公眾號:OpenAtom OpenHarmony】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
Docker運行環境安裝
【「OpenHarmony開發與實踐 | 基于紅莓RK2206開發板」閱讀體驗】+初體驗1
【「OpenHarmony開發與實踐 | 基于紅莓RK2206開發板」閱讀體驗】+初體驗2連發發
openharmony移植AT32F407編譯時錯誤

ARM平臺實現Docker容器技術
名單公布!【書籍評測活動NO.38】OpenHarmony開發與實踐 | 基于紅莓RK2206開發板
ARM平臺實現Docker容器技術
關于Docker 的清理命令集錦
鴻蒙OpenHarmony技術:【Docker編譯環境】

適合大學生的鴻蒙開發板-Purple Pi OH之安裝Docker

Docker容器技術的安裝和使用

ARM平臺實現Docker容器技術
【鴻蒙】OpenHarmony運行docker詳細步驟






 工商網監
工商網監
評論