 雷達測距、測角和測速是怎么回事?
雷達測距、測角和測速是怎么回事?
看 完 秒 懂!
如【一個小知識】雷達—科技圈的低調王者,你真的懂?(上)所述,雷達神通廣大,無處不在地改變著我們的生活體驗,但萬變不離其宗。雷達令人眼花繚亂的應用場景,不外乎都基于它的三大應用原理:測距、測角和測速。
那么,雷達的測距、測角和測速又是怎么回事?看完此文保證你秒懂!
雷達測距
根據雷達原理,被測目標會把接收到的電磁波反射回雷達,不過反射回來的電磁波肯定和發射出去時的電磁波變得有點不一樣了。就好比我們小時候如果干干凈凈的出門,但裹著滿身泥巴回家,父母就會判斷我們在地上打滾了,如果回家時間太晚,那就很可能是跑到更遠的隔壁村了。同樣的,通過對比原始的雷達發射脈沖和回波脈沖之間的延遲時間(小孩出門時間),就可以用來估算目標與雷達站點之間的距離。
舉個栗子,電磁波在空氣中傳播的速度大約是光速 c,即3*10^8m/s,小學學習乘法時,就已經有類似的應用題,距離=速度*時間。只是說,雷達脈沖所走的路程,是雷達站和目標之間的一個來回,因此距離的計算公式,就變成了 。怎么樣,連小學生都聽得懂吧?
。怎么樣,連小學生都聽得懂吧?
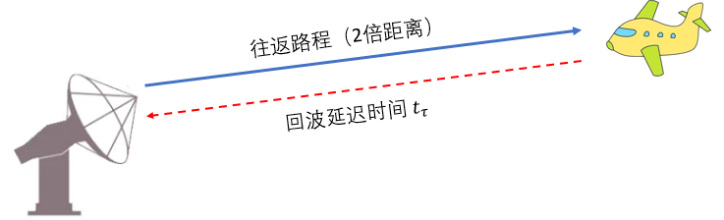
圖1雷達測距原理
雷達測角
哪怕是千年古樹,樹冠雖大,但樹干永遠是最初的基礎與成長的源頭。不管通過雷達測距,雖然能夠得到目標和雷達站之間的距離,但是如果不通過測角來確定出具體方位,目標就仿佛是修煉了鬼影神功的東瀛忍者,能以該距離為半徑,360°全方位變換出無數個影分身迷惑住雷達站。對待這種難纏的敵人,就是時刻去琢磨他!分析他!研究他!最終找到突破點,從而一戰勝之。
事實上,不論是雷達回波,還是什么奇奇怪怪的電磁波,無非都是從三個方向去剖析它,分別是幅度、頻率和相位。而雷達測角功能,就可以通過相位,或者幅度的信息量來獲得。未來雷達如何發展,掌握其原理,才握住了其命脈。
振幅法測角
振幅法主打的就是簡單粗暴。雷達站將會在一定的扇形范圍內,或者直接360°范圍內重拳出擊。只有當雷達波束打到真正的目標上,才會有回波返回到雷達站,雷達站只要找到回波脈沖串的最大值,就能確定這一個時刻波束的指向,就是目標的所在方向!
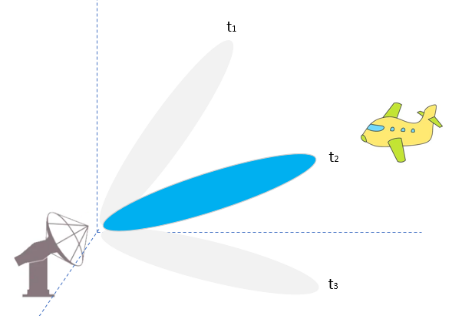
圖2振幅法測角原理
相位法測角
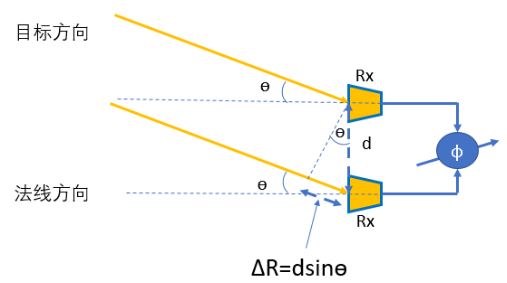
圖3 相位法測角原理
舉個栗子,兩個天線間距離已知為 d,因此它們所收到的回波由于存在波程差?R,肯定會有一相位差 ?。高中物理時學過,相位=頻率*時間,因此

也就是說,只要通過一個相位計,測出兩個接收天線間的相位差,目標方向的角度 ?就呼之欲出了!
相比起來,振幅法的原理似乎比相位法簡單多了,但是振幅法自身還是有不少局限性,比如雷達發送兩個相鄰脈沖時,肯定是有一定轉角的,這樣就會存在一定的“量化測角誤差”,更嚴重的是,如果轉角過大,目標偏離波束軸線太遠,有可能直接就漏掉目標了。
雷達測速
得到目標距離和方位的“小雷達們”不禁沾沾自喜,“目標位置已鎖定,隨時準備全軍出 擊!” 殊不知,萬事萬物都是在時刻變化的。等到大軍到達之前鎖定好的戰場,可能早就已經是“昔人已乘黃鶴去,此地空余黃鶴樓”了。因此時刻把握敵軍的運動情況(測速),并推演出下一時刻目標出現的位置,才是制勝的寶典。
多普勒效應
雖然連續波雷達實際中并不常用,但還是可以從最簡單的連續波雷達來引入這個話題。假如連續波雷達信號的的角頻率為W0,當目標和雷達之間存在相對運動時,兩者間的距離 R 就會隨時間變化,即R(t)=R0-vt。其中,R0 為 t=0 時刻的距離,v 為目標相對雷達的徑向運動速度。因此,雷達回波的時延 ,那么回波信號相比起發射信號來說,相位差為
,那么回波信號相比起發射信號來說,相位差為

,如果把該相位差再對時間求導,就得到了一個頻率差
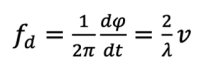
,也就是說,目標和雷達之間的相對運動速度,和發射波與回波間頻率差,存在著正比關系。如果雷達站和目標之間有相向運動時,接收者在單位時間內收到的振蕩數目要比它們不動的時候更多一些,等效為就是頻率增加了;二者間做背向運動時,頻率就會減少。其實這就是我們平時所熟知的多普勒效應。
典型雷達測速場景
在實際應用中,脈沖雷達才是雷達工作的主要方式,而脈沖對應的頻譜是在頻譜上無線寬的一個 sinc 函數。
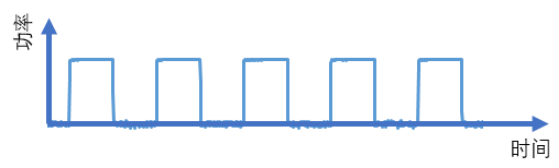
圖4 脈沖信號時域圖
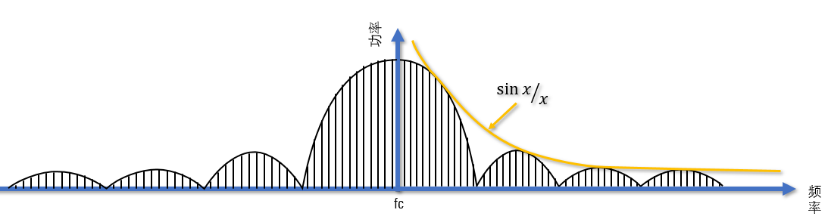
圖5 脈沖信號頻域圖
要像單一頻率的連續波那樣,直接測量 sinc 函數的頻偏,似乎就不那么容易了。但是條條大路都能通羅馬,眼前的障礙,最靠譜的方式,往往是選擇繞過去!
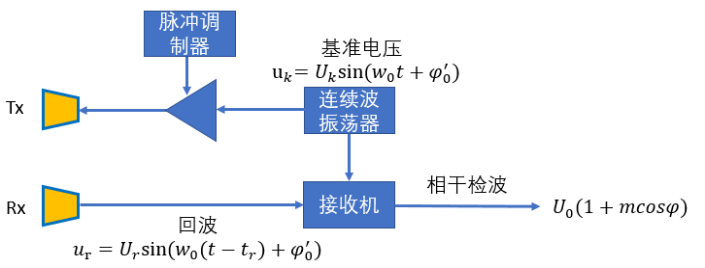
圖6 脈沖雷達測速原理框圖
接收機會將連續波信號 uk 和回波信號 ur 做一個簡單的加法運算,然后再求出這個和信號相干檢波后的包絡 。
。
相干檢波
這里需要額外提一句相干檢波,它是會根據載波的相位信息去檢測并接收信號。比如兩個同幅同相的正弦波,它們相加后,幅值會疊加為原來的兩倍; 但如果是同幅反相的正弦波,相加后,幅值不僅不會增加,反而會消減為 0。
因此圖6中最終合成的信號的幅度,還得取決于回波和發射波之間的相位差值 。其中,U0 是連續振蕩的基準電壓經過檢波后的輸出,它是一直存在的,而
。其中,U0 是連續振蕩的基準電壓經過檢波后的輸出,它是一直存在的,而 則表示回波和基準電壓做相干檢波后,疊加上去的信號分量,并且它只存于回波信號到來的期間。
則表示回波和基準電壓做相干檢波后,疊加上去的信號分量,并且它只存于回波信號到來的期間。
假如是一個固定不動的目標,收到的回波和發射波之間的相位差必然是一個常數。因此,檢波后,隔去直流分量,就可以得到一串等幅的脈沖輸出。但是,對于運動的目標而言,回波相對于發射波的相位差會隨時間改變。
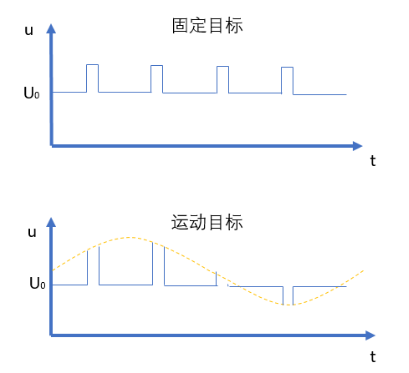
圖7 相干檢波時域波形圖

因此,隔去直流后的脈沖信號包絡為

其中,多普勒頻移 ,即
,即 。
。
呀!這不就和連續波雷達求得的多普勒頻率公式一樣了嘛,多普勒頻率和目標的徑向運動速度成正比關系!只是說脈沖雷達的多普勒頻率剛好就是回波脈沖的包絡調制頻率,這相當于是連續波雷達工作的一個取樣狀態。
看到這里,必須為你撒花!鼓掌!點贊!雖然這一章節有一丟丟的燒腦,但是我相信,雷達測距、測角和測速的原理你已經了然于胸了!
下篇文章,我們會為大家介紹雷達工程師的好隊友——那些優秀的測試設備,是如何為雷達的應用加速助威的,敬請期待!
羅德與施瓦茨科技集團開發、生產和銷售種類廣泛的專業電子產品。公司推出豐富的產品組合,旨在締造一個更加安全的互聯世界。在測試與測量、安全通信、網絡和網絡安全以及廣播和媒體等市場,全球客戶都信賴羅德與施瓦茨及其提供的先進解決方案。在成熟的業務領域之外,羅德與施瓦茨還大力投資人工智能、工業物聯網 (IIoT)、6G、云解決方案和量子技術等各種未來技術。自公司創立以來的近 90 年間,羅德與施瓦茨是眾多行業客戶的可靠合作伙伴。
審核編輯:湯梓紅
-
天線
+關注
關注
68文章
3181瀏覽量
140707 -
雷達
+關注
關注
50文章
2897瀏覽量
117310 -
電磁波
+關注
關注
21文章
1441瀏覽量
53745 -
雷達測速
+關注
關注
0文章
5瀏覽量
6425 -
雷達測距
+關注
關注
0文章
11瀏覽量
7414
發布評論請先 登錄
相關推薦
納雷科技發布新一代雙鑒引擎測距測速雷達
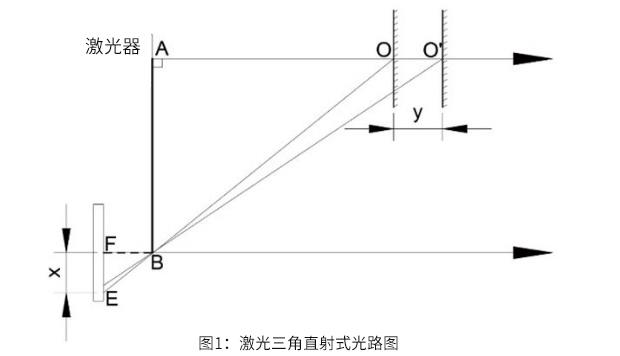
闡述基于激光三角測距法的激光雷達原理

車用低成本24GHZ雷達傳感器/測速/測距/測方向
CW工作模式下,如何限制雷達的探測距離,使其只探測10米以內的距離?
基于ARM核心板AM335x設計高速公路廣域雷達測速解決方案
微型測距雷達的原理及組成
LFMCW雷達數字化測距測速的工作參數設計資料說明


雷達三大應用原理:測距、測角和測速







 工商網監
工商網監
評論