") 微美全息(NASDAQ:WIMI)開(kāi)發(fā)基于增強(qiáng)現(xiàn)實(shí)控制的閉環(huán)混合信號(hào)腦機(jī)接口機(jī)械臂控制系統(tǒng)
微美全息(NASDAQ:WIMI)開(kāi)發(fā)基于增強(qiáng)現(xiàn)實(shí)控制的閉環(huán)混合信號(hào)腦機(jī)接口機(jī)械臂控制系統(tǒng)
隨著科技的不斷發(fā)展,人們對(duì)于機(jī)器人技術(shù)的需求也逐漸增加。機(jī)器人技術(shù)的應(yīng)用場(chǎng)景越來(lái)越廣泛,其中,機(jī)械臂控制系統(tǒng)在很多領(lǐng)域都是一個(gè)非常重要的應(yīng)用領(lǐng)域。腦機(jī)接口(BMI)也已被廣泛用于控制機(jī)械臂。然而,對(duì)于BMI用戶(hù)來(lái)說(shuō),使用機(jī)械臂控制物體的過(guò)程仍然是一項(xiàng)復(fù)雜的任務(wù)。即使經(jīng)過(guò)廣泛的訓(xùn)練,也很難達(dá)到高效率和準(zhǔn)確性。一個(gè)重要的原因是用戶(hù)缺乏足夠的反饋信息來(lái)執(zhí)行閉環(huán)控制。
據(jù)報(bào)道,微美全息(NASDAQ:WIMI)提出了一種增強(qiáng)現(xiàn)實(shí)(AR)引導(dǎo)的輔助方法,使用混合BMI為用戶(hù)提供增強(qiáng)的視覺(jué)反饋,用于閉環(huán)控制,該混合BMI結(jié)合了腦電圖信號(hào)和眼睛跟蹤,以直觀有效地控制機(jī)械臂。
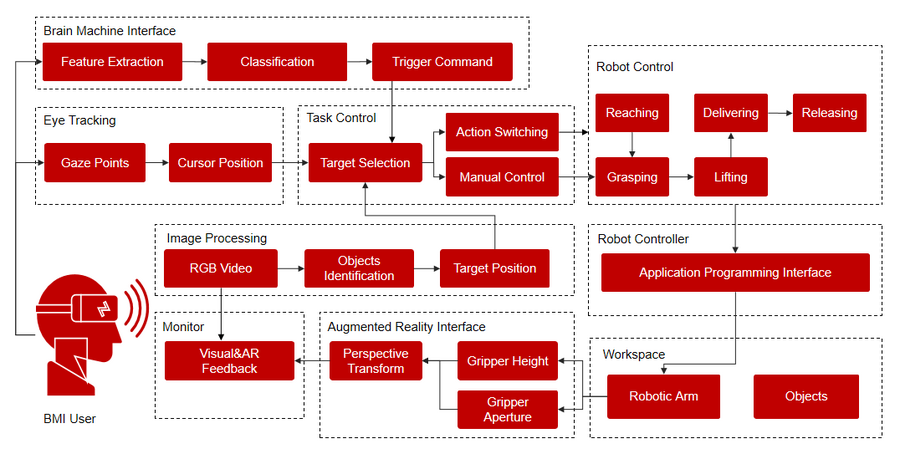
公開(kāi)資料顯示,微美全息(NASDAQ:WIMI)開(kāi)發(fā)的基于增強(qiáng)現(xiàn)實(shí)控制的閉環(huán)混合信號(hào)腦機(jī)接口機(jī)械臂控制方法,通過(guò)結(jié)合基于腦電圖(EEG)信號(hào)的BMI和眼動(dòng)追蹤技術(shù),為用戶(hù)提供增強(qiáng)的視覺(jué)反饋,在控制機(jī)械臂過(guò)程中實(shí)現(xiàn)閉環(huán)控制。該系統(tǒng)集成了BMI、眼睛跟蹤、圖像處理、自動(dòng)控制和AR接口的功能,允許用戶(hù)執(zhí)行對(duì)象操作任務(wù)。圖像處理用于從工作空間的圖像中分割所有潛在的矩形對(duì)象。用戶(hù)可以使用眼睛跟蹤來(lái)選擇分割的對(duì)象。從BMI解碼的輸出用于(1)確認(rèn)用戶(hù)選擇的對(duì)象,(2)切換動(dòng)作順序,或(3)在抓取和提升過(guò)程中連續(xù)控制夾具的孔徑和高度。用戶(hù)選擇的物體以及抓取和提升操作的狀態(tài)通過(guò)計(jì)算機(jī)屏幕使用AR技術(shù)實(shí)時(shí)反饋給用戶(hù)。最后,機(jī)械臂根據(jù)混合BMI解碼的輸出執(zhí)行拉伸、抓取、提升、遞送和釋放任務(wù)。系統(tǒng)裝置設(shè)備包括眼動(dòng)儀、腦電圖耳機(jī)、電腦、機(jī)械臂和USB攝像頭。使用混合凝視BMI和AR增強(qiáng)的視覺(jué)反饋來(lái)執(zhí)行用戶(hù)和系統(tǒng)之間的交互。
WIMI微美全息研發(fā)的基于增強(qiáng)現(xiàn)實(shí)控制的閉環(huán)混合信號(hào)腦機(jī)接口機(jī)械臂控制系統(tǒng)包括:
增強(qiáng)現(xiàn)實(shí)控制界面:通過(guò)AR技術(shù),設(shè)計(jì)出一個(gè)直觀、易用的控制界面,用戶(hù)可以通過(guò)手勢(shì)或語(yǔ)音等方式控制機(jī)械臂的運(yùn)動(dòng)。
采集腦電信號(hào):使用腦電圖設(shè)備采集用戶(hù)大腦的電信號(hào),將其傳輸?shù)接?jì)算機(jī)。
處理腦電信號(hào):使用信號(hào)處理算法,對(duì)腦電信號(hào)進(jìn)行濾波、特征提取等操作,提取出用戶(hù)想要控制的機(jī)械臂運(yùn)動(dòng)的指令。
生成控制信號(hào):根據(jù)用戶(hù)的腦電信號(hào),生成控制信號(hào),控制機(jī)械臂的運(yùn)動(dòng)。
機(jī)械臂控制:機(jī)械臂的控制系統(tǒng),包括電機(jī)驅(qū)動(dòng)器、位置傳感器、控制芯片等硬件設(shè)備的選擇和搭建。
實(shí)現(xiàn)閉環(huán)控制:將采集到的機(jī)械臂位置反饋信息傳輸回計(jì)算機(jī),實(shí)現(xiàn)閉環(huán)控制,確保機(jī)械臂的運(yùn)動(dòng)精確、穩(wěn)定。
實(shí)時(shí)控制:將用戶(hù)的控制信號(hào)和機(jī)械臂位置反饋信息實(shí)時(shí)傳輸?shù)綑C(jī)械臂控制系統(tǒng)中,實(shí)現(xiàn)實(shí)時(shí)控制。
同時(shí),WIMI微美全息對(duì)所開(kāi)發(fā)的閉環(huán)系統(tǒng)(具有AR反饋)與目前傳統(tǒng)的開(kāi)環(huán)系統(tǒng)(僅具有視覺(jué)檢查)進(jìn)行了測(cè)試。結(jié)果表明,與僅使用正常視覺(jué)檢查的試驗(yàn)相比,AR反饋顯著降低了抓取和提升物體的觸發(fā)命令。此外,夾具在提升過(guò)程中的高度間隙也減小了。混合BMI用戶(hù)受益于AR界面提供的信息,這提高了效率,并減少了抓舉過(guò)程中的認(rèn)知負(fù)荷。AR反饋的閉環(huán)系統(tǒng)為用戶(hù)使用混合BMI控制機(jī)械臂提供了一種新穎有效的方法,通過(guò)集成更先進(jìn)的圖像處理和機(jī)器學(xué)習(xí)算法來(lái)進(jìn)一步改進(jìn)傳統(tǒng)控制系統(tǒng),以增強(qiáng)工作空間中對(duì)象的分割和BMI信號(hào)的解碼。
科技在不斷進(jìn)步和發(fā)展,機(jī)器人技術(shù)的應(yīng)用場(chǎng)景越來(lái)越廣泛。機(jī)械臂控制系統(tǒng)作為機(jī)器人技術(shù)的一個(gè)重要應(yīng)用領(lǐng)域,市場(chǎng)前景非常廣闊。特別是在生產(chǎn)制造行業(yè)中,機(jī)械臂控制系統(tǒng)已經(jīng)成為了必不可少的工具。WIMI微美全息基于增強(qiáng)現(xiàn)實(shí)控制的閉環(huán)混合信號(hào)腦機(jī)接口機(jī)械臂控制系統(tǒng),采用了增強(qiáng)現(xiàn)實(shí)技術(shù)和腦機(jī)接口技術(shù),可以提高操作的準(zhǔn)確性和速度,同時(shí)還保證了操作的安全性,擁有非常廣泛的市場(chǎng)前景。WIMI微美全息也將進(jìn)一步完善與改進(jìn)該系統(tǒng),使其適用與現(xiàn)實(shí)的市場(chǎng)需求,用于目前的工業(yè)生產(chǎn)環(huán)境。
審核編輯黃宇
-
控制系統(tǒng)
+關(guān)注
關(guān)注
41文章
6546瀏覽量
110484 -
增強(qiáng)現(xiàn)實(shí)
+關(guān)注
關(guān)注
1文章
712瀏覽量
44927 -
腦機(jī)接口
+關(guān)注
關(guān)注
8文章
369瀏覽量
21471
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
人機(jī)協(xié)同新紀(jì)元:微美全息引領(lǐng)混合增強(qiáng)智能技術(shù)革新
閉環(huán)控制的主要組成包括什么
閉環(huán)負(fù)反饋控制的基本方法是什么
增強(qiáng)現(xiàn)實(shí)ar和全息投影的區(qū)別
閉環(huán)伺服控制系統(tǒng)原理及特點(diǎn)
控制系統(tǒng)中開(kāi)環(huán)和閉環(huán)如何判斷
開(kāi)環(huán)控制系統(tǒng)與閉環(huán)控制系統(tǒng)的區(qū)別
機(jī)械運(yùn)動(dòng)控制系統(tǒng)的組成和應(yīng)用
閉環(huán)控制系統(tǒng)的原理和組成
馬斯克公布首位腦機(jī)接口受試者新進(jìn)展!微美全息(WIMI.US)深入研究開(kāi)啟智能革命性飛躍!

腦機(jī)接口將在十年內(nèi)實(shí)現(xiàn)市場(chǎng)化應(yīng)用,微美全息(WIMI.US)提前入局穩(wěn)步推進(jìn)邁入增長(zhǎng)階段
微美全息(NASDAQ:WIMI)探索全局-局部特征自適應(yīng)融合網(wǎng)絡(luò)框架在圖像場(chǎng)景分類(lèi)中的創(chuàng)新運(yùn)用
微美全息(NASDAQ:WIMI)開(kāi)發(fā)基于神經(jīng)網(wǎng)絡(luò)的無(wú)人機(jī)控制系統(tǒng)引領(lǐng)技術(shù)革新
【開(kāi)源獲獎(jiǎng)案例】四軸機(jī)械臂控制系統(tǒng)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論