") 基于圖搜索的基礎(chǔ)知識
基于圖搜索的基礎(chǔ)知識
配置空間
機(jī)器人規(guī)劃的配置空間概念:一個空間包含所有機(jī)器人自由度的機(jī)器人配置,描述為C-space
機(jī)器人配置:表示對機(jī)器人上面所以點的位置的描述
機(jī)器人自由度:規(guī)劃的時候用最少的坐標(biāo)數(shù)量去表示機(jī)器人配置,例如無人機(jī)規(guī)劃,在微分平坦中進(jìn)行規(guī)劃則是xyzyaw四個變量,所以對于無人機(jī)軌跡規(guī)劃來說有四個自由度。
機(jī)器人配置空間:一個空間包含所有機(jī)器人自由度的機(jī)器人配置,描述為C-space
任何可能的機(jī)器人的位姿在C-space中描述為一個點
配置空間的意義:
在工作空間中進(jìn)行規(guī)劃,機(jī)器人有不同的形狀和大小,比如有圓形的或方形的碰撞檢測需要知道機(jī)器人的外形,然后再做檢測,這樣是費(fèi)時費(fèi)力的。

在配置空間中做規(guī)劃
機(jī)器人在C-space中表示一個點,例如位置就是一個點屬于R3一個位姿屬于SO(3)
在配置空間中,機(jī)器人表示成了一個點,那么在配置空間中,障礙物也需要特殊的處理,把工作空間中的障礙物變成配置空間中的障礙物,被稱為 配置空間障礙物或者C-obstacle這個工作是在運(yùn)動規(guī)劃前完成的,一次完成的工作。
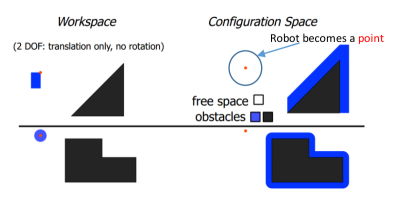
障礙物安照機(jī)器人尺寸進(jìn)行膨脹,上面機(jī)器人被設(shè)置成了一個點,只要點在障礙物外面,就不會發(fā)生碰撞
C-space是C-obstacle 和C-free組成的
經(jīng)過配置空間的處理,路徑規(guī)劃變成了在C-free 中找到起點和終點的路徑尋找。
在工作空間中,機(jī)器人有尺寸有形狀,對于運(yùn)動規(guī)劃會帶來困難,在配置空間中,機(jī)器人用一個點來描述,方便做運(yùn)動規(guī)劃
經(jīng)過上述配置空間的操作,碰撞檢測就進(jìn)行了簡化,這就是配置空間的意義。
機(jī)器人被看做是一個球體,半徑為r
對障礙物安照半徑r進(jìn)行膨脹,藍(lán)色就是膨脹后的障礙物,然后就可以進(jìn)行路徑規(guī)劃和生成。
圖和圖搜索算法的基本概念
圖的基礎(chǔ)概念
圖是有節(jié)點和邊的一種表達(dá)方式
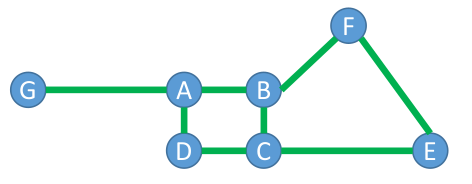
各節(jié)點由邊連起來
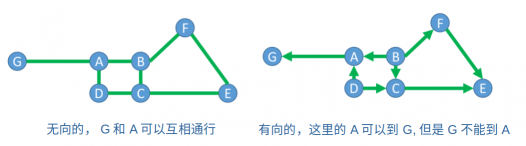
邊可以是有向的,也可以無向的
邊也可以有權(quán)重,如果沒有特殊說明,可以認(rèn)為權(quán)重是一樣的。
下面則是有權(quán)重的

圖搜索基本概念
對于任何一個圖搜索算法,首先要構(gòu)造一個圖
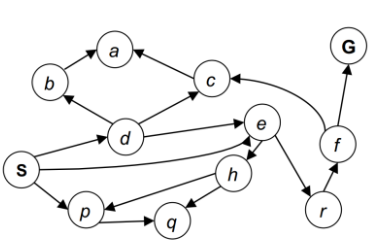
上圖是抽象概念里的圖
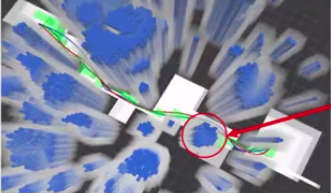
對于實際場景,我們需要人為構(gòu)造一個圖,以下是兩種簡單的例子
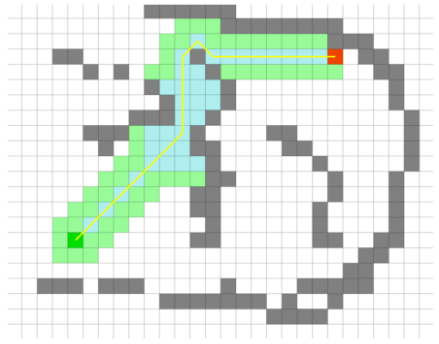
柵格地圖的路徑規(guī)劃,里面的節(jié)點和相鄰的節(jié)點是具有連接關(guān)系的,所以本身就是一個圖了
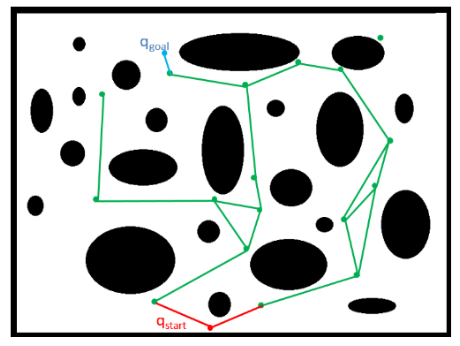
基于采樣的,沒有天然的節(jié)點關(guān)系,需要人為構(gòu)造一個圖在里面,例如上面就是通過算法構(gòu)造的有節(jié)點和邊組成的圖
圖搜索算法
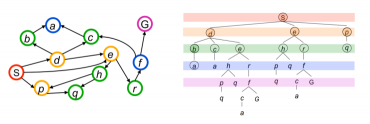
搜索總是從起始狀態(tài)Xs開始,到Xg結(jié)束
對于搜索節(jié)點,可以構(gòu)建一個搜索樹
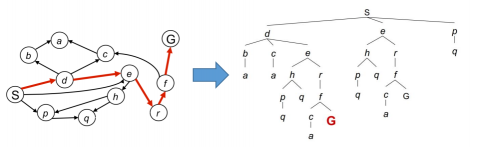
右邊和左邊是等價的,只是寫成了樹狀的結(jié)構(gòu),這樣看彼此關(guān)系更加清晰點
從起點搜索到終點后,回溯整個搜索過程,就可以得到希望的搜索路徑
對于實際機(jī)器人來說,構(gòu)建整個空間的搜索樹,代價很大,所以需要盡可能快,但是不失搜索路徑的算法。
圖搜索算法框架
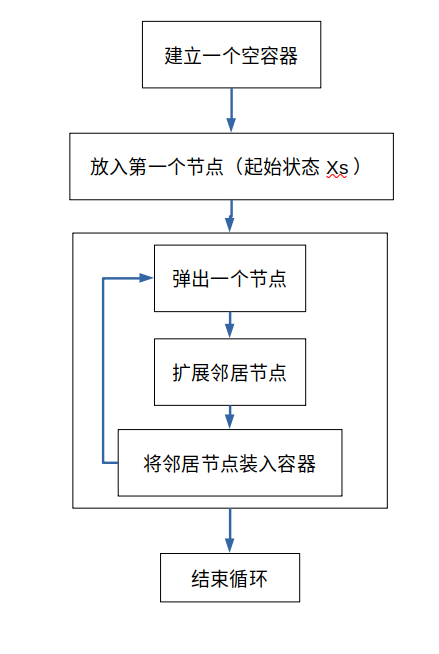
所有的圖搜索算法都是按照下面的框架進(jìn)行的:
1、維護(hù)一個容器,裝載將來有可能訪問的一個節(jié)點
2、容器初始化為空,放入的第一個節(jié)點就是起始狀態(tài)Xs
3、循環(huán):根據(jù)預(yù)先定義的一個指標(biāo)或者目的,從容器中彈出一個節(jié)點 ,稱之為訪問一個節(jié)點,獲取彈出節(jié)點所有的鄰居節(jié)點—擴(kuò)展,將這些鄰居節(jié)點裝入容器
4、結(jié)束循環(huán):訪問到了結(jié)束狀態(tài),或者自定義的一個指標(biāo),結(jié)束循環(huán)
有兩個下面的問題需要注意:
什么時候結(jié)束循環(huán)?
一種可能就是容器空了,這代表沒有了我們將來要訪問的節(jié)點了,遍歷完了所有節(jié)點
搜索到了結(jié)束節(jié)點
如果這個圖本身是有回環(huán)的呢?
為了在圖搜索中避免形成回環(huán),永遠(yuǎn)走不出去,需要再維護(hù)一個新的容器,該容器裝載著已經(jīng)被訪問過的節(jié)點,被訪問過的節(jié)點不能再次被訪問
圖搜索優(yōu)化的方向就是:
按照什么規(guī)則去訪問節(jié)點,按照什么規(guī)則彈出節(jié)點,使我們盡可能快的找到終止節(jié)點。
圖遍歷算法:
廣度優(yōu)先搜索
深度優(yōu)先搜索
廣度優(yōu)先搜索遵循先進(jìn)先出的原則,維護(hù)的是一個隊列
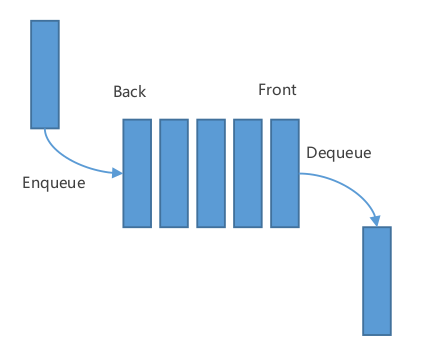
彈出元素,總是從隊列的頭彈出的
深度優(yōu)先搜索遵循的是后進(jìn)先出的原則,維護(hù)的是一個堆棧
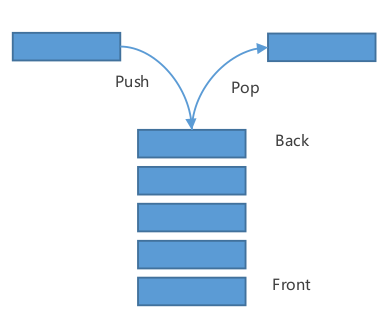
彈出從最上面彈出,最后進(jìn)入容器的,最先被彈出來
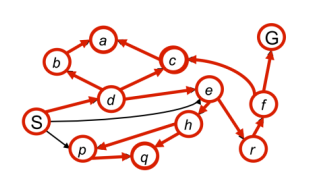
廣度優(yōu)先搜索(BFS)
特點:每次彈出層級最淺的一個節(jié)點,維護(hù)的是一個隊列的結(jié)構(gòu)
所以搜索過程是一層一層進(jìn)行的
最直觀的理解就是一層一層的進(jìn)行
BFS步驟的拆分:
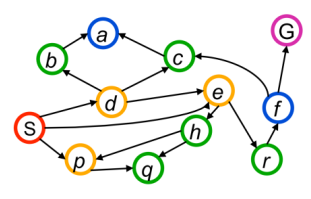
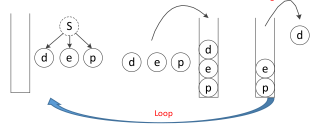
這樣的一個圖結(jié)構(gòu),BFS的步驟是下面這樣的
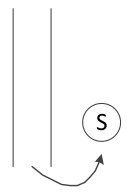
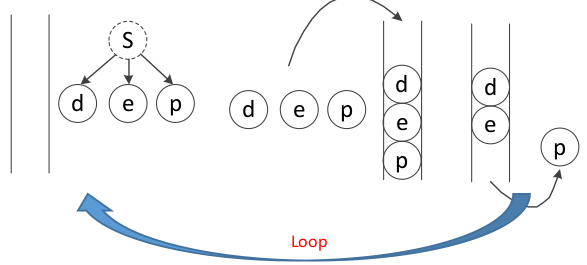
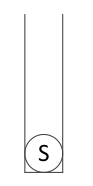
初始化容器是空的,首先放入開始節(jié)點S

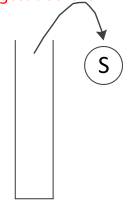
彈出(訪問)S節(jié)點,容器就再次變?yōu)榭盏?/p>
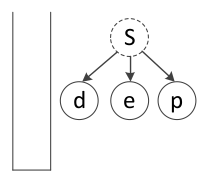
對S進(jìn)行擴(kuò)展,從圖上上可以看出,S可以擴(kuò)展的是dep
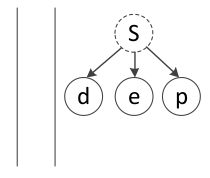
安照定義的規(guī)則,將擴(kuò)展的節(jié)點以規(guī)則順序放入容器中
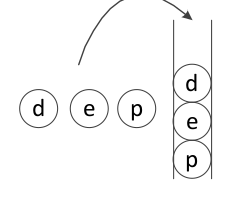
與DFS區(qū)別就是,從下面彈出節(jié)點,先彈出p節(jié)點
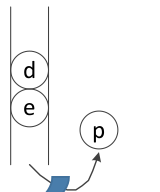
然后再進(jìn)行循環(huán)
最終找到終止節(jié)點,結(jié)束循環(huán),完成圖搜索。
深度優(yōu)先搜索(DFS)
特點:每次彈出的節(jié)點是最深層級的一個節(jié)點,維護(hù)的是一個堆棧
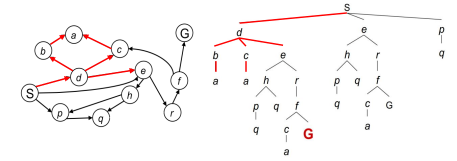
直觀的理解就是沒次把一個分支走到底
DFS步驟的拆分:
注意—維護(hù)的是一個棧的結(jié)構(gòu)
這樣的一個圖結(jié)構(gòu),DFS的步驟是下面這樣的
初始化容器是空的,首先放入開始節(jié)點S
彈出(訪問)S節(jié)點,容器就再次變?yōu)榭盏?/p>
對S進(jìn)行擴(kuò)展,從圖上上可以看出,S可以擴(kuò)展的是dep
安照定義的規(guī)則,將擴(kuò)展的節(jié)點以規(guī)則順序放入容器中
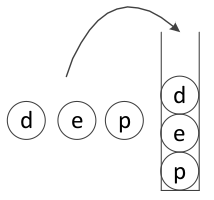
然后深度優(yōu)先搜索是彈出容器中的,后入的節(jié)點(層級最深的),即d節(jié)點
然后再擴(kuò)展d節(jié)點,將擴(kuò)展節(jié)點放入容器,再彈出該彈出的節(jié)點,再擴(kuò)展,再放入的循環(huán)操作
最終找到終止節(jié)點,結(jié)束循環(huán),完成圖搜索。
BFS vs DFS
從最終的遍歷結(jié)果圖中,可以看到兩者的區(qū)別
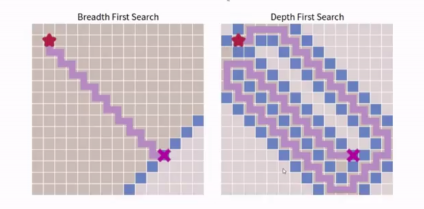
BFS是從開始節(jié)點一層一層的去向外擴(kuò)展,直到擴(kuò)展到了目標(biāo)節(jié)點,然后回溯去找到最短路徑。
DFS是從開始節(jié)點一條路走到頭,去找到目標(biāo)節(jié)點。
由結(jié)果來看,BFS 找到的路徑是最短的
所以對應(yīng)移動機(jī)器人,在做路徑規(guī)劃找最短路徑時,做好的方法就是BFS。
-
機(jī)器人
+關(guān)注
關(guān)注
210文章
28191瀏覽量
206505 -
無人機(jī)
+關(guān)注
關(guān)注
228文章
10336瀏覽量
179608
原文標(biāo)題:移動機(jī)器人運(yùn)動規(guī)劃—基于圖搜索的基礎(chǔ)知識
文章出處:【微信號:vision263com,微信公眾號:新機(jī)器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
labview基礎(chǔ)知識
通信基礎(chǔ)知識教程
使用Eclipse基礎(chǔ)知識
電源管理基礎(chǔ)知識電源管理基礎(chǔ)知識電源管理基礎(chǔ)知識






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論