 KUKA C4掉電極帽關水是咋回事
KUKA C4掉電極帽關水是咋回事
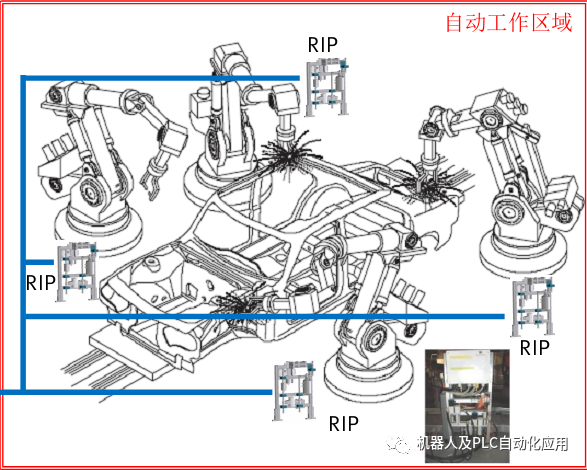
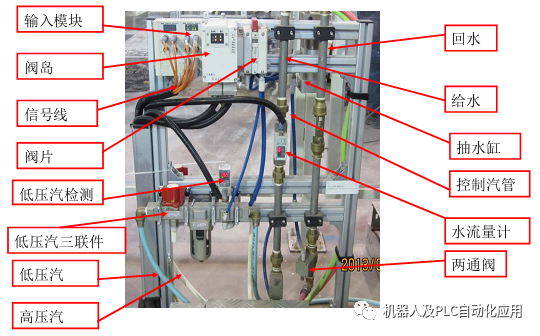
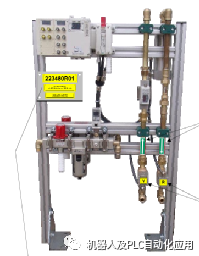
RIP的各元器件
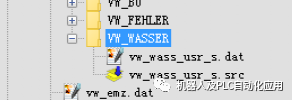
1.控制RIP的USER程序在這里.正常情況下這個是大眾統一的標準程序.我只能說出像問題的概率是很低的!我們要知道掉電極產生時,機器人程序會發生什么!
下圖:機器人RIP.

從圖片中我們知道機器人RIP的標準控制結構的閥體是不使用先導閥的直接由換向閥控制開關水,即A513/A515 .
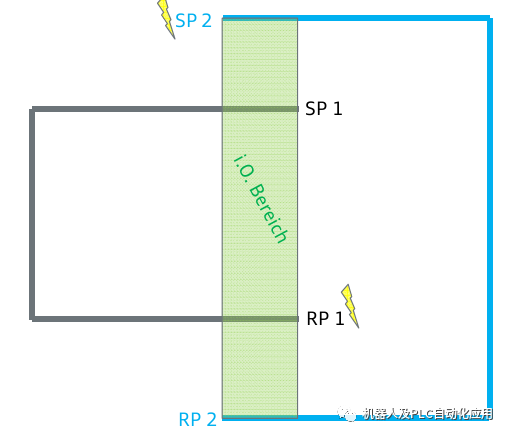
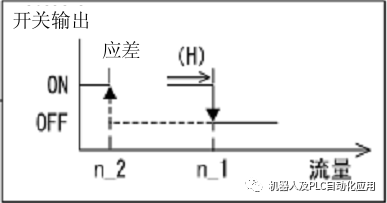
SP2 =上限值(帽被撕下)
SP1 =較低的最大關斷值
RP1 =較低的關閉值(阻止冷卻)
RP2 =上限值的最小值
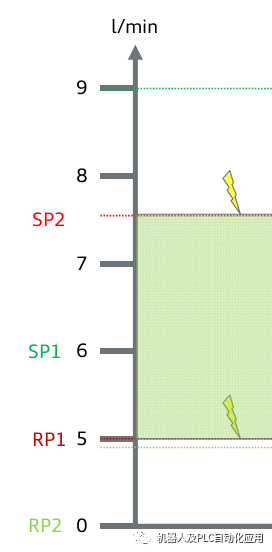
設置流量監控器的值
大眾標準規定設置值,但絕大多數現場是不能滿足的,需要靈活設置,需要實驗!不能教條!
SP2 = 7.5升/分鐘
RP2 = 0.0升/分鐘
SP1 = 6.0升/分鐘
RP1 = 5.0升/分鐘
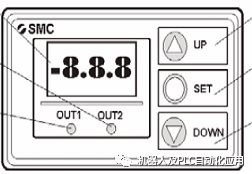
OUT 1 = 常開
OUT 2 = 常閉
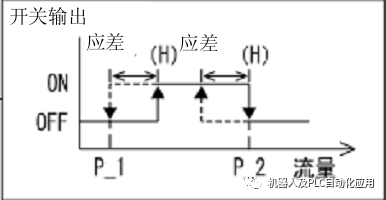
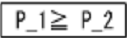
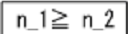
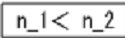
對于SMC來說需要設置P1-P2(低壓部分),n3-n4(高壓部分如果超出設定值認為電極帽以掉).
輸出取正時:
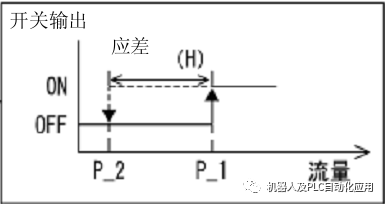
輸出取反時:
“控制低壓”(E516,E524,E532)必須集成到行駛狀態中。
F819 = EIN ?通過MAKRO50中的水回路激活大眾RIP.
F820 = EIN ?在過MAKRO50中激活不帶水回路的大眾RIP.
F817 = EIN ?激活大眾RIP而不檢查宏50中的低壓, 對于不帶低壓控制的大眾RIP(BD01ND)
RIP的主要控制信號
GLOBAL INT I_BV01WMIN=514 E514最小水流量的監控值取正值.
GLOBAL INT I_BV01WMAX=515 E515最大水流量的監控值被檢測開關取反設置.
GLOBAL INT I_BD01ND=516 有低壓氣
GLOBAL INT O_KYP01WE=513 輸出開水
GLOBAL INT O_KYP01WA=515 輸出關水

如果正確的水流量正確,則輸入為(#冷卻水最小值= TRUE)和(#冷卻水最大值= TRUE)。
如果水流量太低,則輸入為(#冷卻水最小值= FALSE),輸入為(#冷卻水最大值= TRUE)。
如果水流量過高,則輸入為(#冷卻水最小值= TRUE)和INPUT(#冷卻水最大值= FALSE)。
如果取下電極帽(最大流量),則4秒鐘后關閉冷卻水。
在WASSER的USER程序控制
IF NOT WASSERSTOE THEN -如果沒有水故障
-水流量超過最大流量故障-可認為是電極帽掉了/漏了
IF ($IN[I_BV01WMIN] AND NOT $IN[I_BV01WMAX]) OR ($IN[I_BV02WMIN] AND NOT $IN[I_BV02WMAX]) OR ($IN[I_BV03WMIN] AND NOT $IN[I_BV03WMAX]) THEN
-E514 有低壓水和沒有高壓水E515-
-正常情況下是E514和E515高低水都有,當水壓制超過高壓水時E515會變為FLASE
-因此在調解水流量閥時因該注意高壓水壓力值不能太大。
-
電極
+關注
關注
5文章
807瀏覽量
27163 -
KUKA
+關注
關注
3文章
217瀏覽量
16490
原文標題:說說KUKA C 4掉電極帽關水是咋回事
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
C4變身!小摩七彩虹C4!
KUKA機器人伺服驅動模塊維修
【底盤大PK】雪鐵龍C4 L/世嘉
中國北斗是咋回事?從GPS說起
庫卡機器人基礎教程和庫卡C4編程指南及焊接機器人教程合集免費下載

KR C4機器人和LBR iiwa機器人的不同之處
KUKA C4 安裝工業以太網軟件詳細操作步驟
KUKA C 4掉電極帽關水是怎么回事





 工商網監
工商網監
評論