 簡單介紹PWM定時器模塊內的一些概念
簡單介紹PWM定時器模塊內的一些概念
概 述
在進行電機類、電源類應用開發時,如何使用PWM定時器模塊靈活、高效的實現所需 PWM波形的輸出,是眾多開發者關注的問題。先楫半導體已發布的HPM6000系列芯片上,均帶有PWM定時器模塊。與普通定時器產生的PWM相比,其產生的PWM可方便的配置為互補PWM對,并帶有強制輸出、死區插入、故障封鎖、影子寄存器等功能。
本文將簡單介紹PWM定時器模塊內的一些概念,以圖文的形式幫助開發者理解PWM定時器模塊的運行方式。然后輔以大量代碼實例,介紹了如何生成普通 PWM、互補 PWM、同步 PWM、錯相 PWM,以及PWM如何使用ACMP封波。幫助廣大開發者更好地使用 PWM 定時器模塊實現自己所需的功能。
PWM 模塊
關于先楫半導體HPM6000系列 PWM 模塊的詳細功能,請參考先楫半導體官方網站發布的 UM 手冊。
1
24+4 位向上計數器
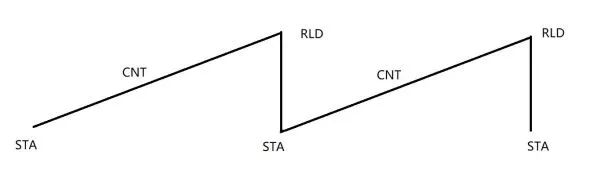
一個 PWM 定時器模塊內共有 3 個 24+4 位寄存器,分別為 STA、CNT、RLD。STA 與 RLD 為計數器計數的起點和終點;CNT 內保存著當前時刻的計數值。計數器從 STA 開始計數,達到 RLD 后重新從 STA 計數,一個又一個周期的循環往復,周期為 RLD-STA+1。
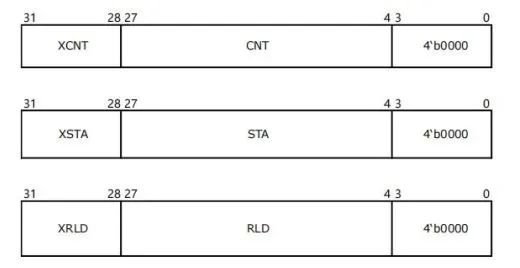
4 位拓展位,為開發者提供了更多樣的計數信息:每當 CNT 計數到 RLD時,會產生 RLD 事件(可以生成中斷或 DMA 請求);若 XRLD 不為 0,則每當 CNT 計數到 RLD 時,XCNT 加 1,當 XCNT 等于 XRLD 時,產生 XRLD 事件(可以生成中斷或 DMA 請求)。
2
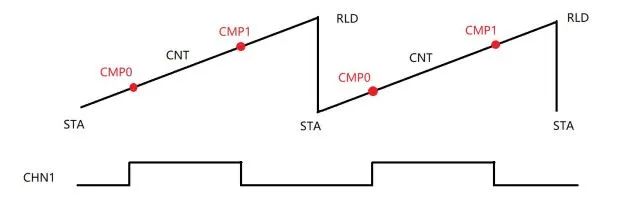
一個 PWM 定時器具有 16~24 個通道,以及 24 個比較器 CMPx(x=1~24)。比較器 CMPx 可以理解為 CNT 計數過程中的觸發開關:每當CNT 等于 CMPx 時,該通道 PWM 輸出會進行翻轉。
開發者可以配置將哪些 CMPx 安裝在目標通道上:配置方法為指定 x,再指定用于該通道比較器的數量 n,結果就是 CMPx、CMPx+1、... 、CMPx+n-1 比較器被應用于該通道。
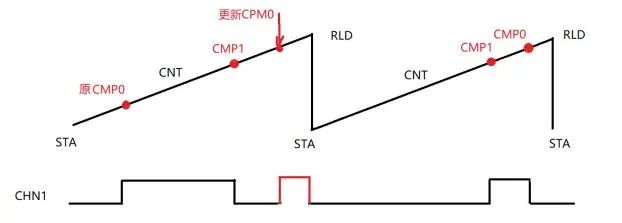
假設我們對通道 1 進行配置,x=0,n=2,則如下圖所示:
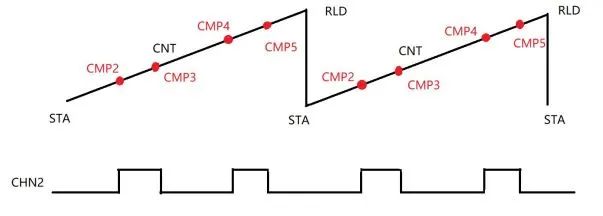
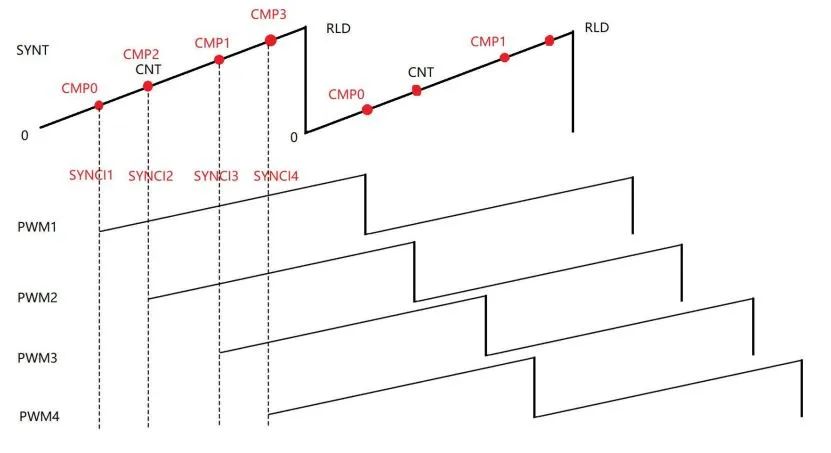
假設我們對通道 2 進行配置,x=2,n=4,則如下圖所示:
3
影子寄存器
影子寄存器的作用是為 PWM 定時器的部分關鍵寄存器提供保護。在 CPU訪問寄存器的時候,實質上改變的是它的影子寄存器,新值并不馬上生效。只有在指定的時刻,才把影子寄存器的值更新到寄存器,防止即時生效的方式導致 PWM 輸出波形異常,導致炸管子、短路等事故發生。
在芯片內,STA、RLD、CMPx、FRCMD 寄存器帶有影子寄存器(這 4 類寄存器的更新會影響 PWM 的波形)。總體而言,HPM 芯片提供了 4 種方式將影子寄存器更新到控制寄存器內,分別為:
軟件將 SHCR [SHLK]位置 1 時生效
即時生效
某個 CMPx 比較事件發生時生效
SHRLDSYNCI 上捕獲到上升沿時生效
通常建議開發者配置影子寄存器為“某個 CMPx 比較事件發生時生效”,其它 3 種方式更新影子寄存器到寄存器內時,多多少少不能保證此時 PWM 輸出的狀態,可能會導致 PWM 波形異常。只有在開發者確定用其它 3 種更新方式不會導致硬件故障時,才推薦使用。下圖展示了 CPU 以實時方式將影子寄存器更新到寄存器內可能產生的異常。
4
同步輸入 SYNCI 與同步定時器 SYNT
同步輸入 SYNCI 的作用是,當此信號有效時 CNT 的值被強制為 STA,SYNCI 無效后 CNT 開始正常計時。當需要多個 PWM 定時器的時基相同或錯相時,操作PWM 定時器的 SYNCI 信號即可達到目標。
同步定時器 SYNT 是專門用來完成以上操作的計時器。SYNT 上有 4 個通道,每個通道有一個 CMP,發生 CMP 比較事件時,可通過互聯管理器 TRGM將此事件路由到 SYNCI 信號上,從而實現了多個 PWM 的同步/錯相。
5
互聯管理器 TRGM
互聯管理器是將片上眾多外設相互關聯使用的橋梁。例如可以用 PWM 比較事件觸發 ADC 采樣,使用模擬比較器 ACMP 比較結果對 PWM 封波,使用IO 輸入觸發 GPTMR 同步計時等等。其功能非常強大,且易用。下面以一張圖繪出 TRGM 的基本模型。
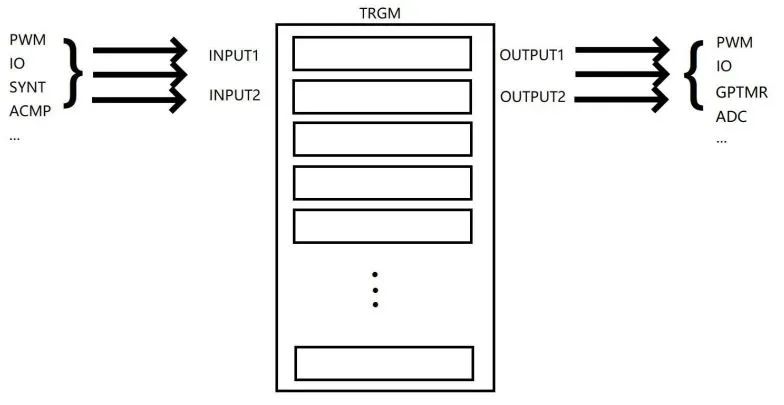
簡而言之,TRGM 的每個 output 通道都可以在眾多的 INPUT 中選一個。例如可以將 SYNT 的比較事件做為 INPUT,輸出到 PWM 的 SYNCI,這樣就實現了 PWM 同步;例如可以將 IO 作為 INPUT,輸出到 IO,這樣就實現了IO 電平的轉移輸出。
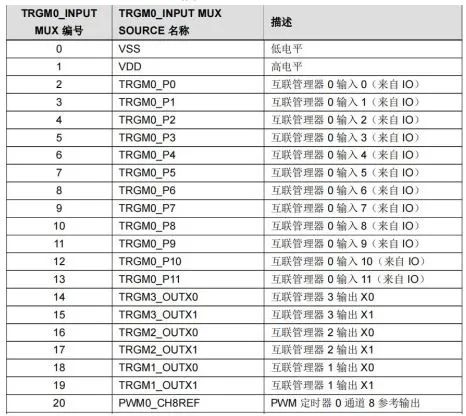
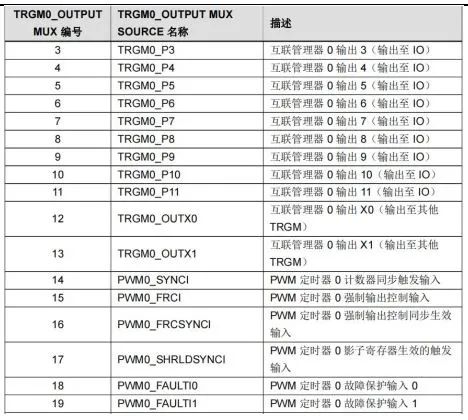
TRGM 可以實現外設硬件級別的同步與觸發,可以實現各種外設互聯配合使用,是極有用的一個功能模塊。使用 TRGM 時,需要參考 UM 手冊中TRGMx_INPUT_MUX 列表與 TRGMx_OUTPUT_MUX 列表,合理分配資源,選擇需要的 INPUT 與 OUTPUT 信號。
PWM模塊
普通PWM
由上述可知,一路普通PWM的輸出需要配置好以下幾點:
PWM 輸出控制:是否互補對、死區插入等
RLD、STA
CMPx
影子寄存器
函數如下,逐一進行分析:
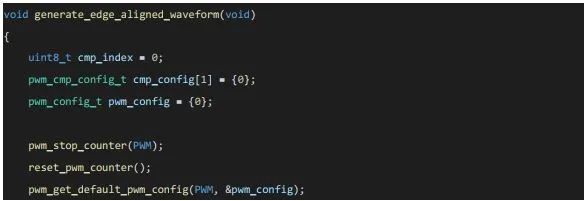
首先停止 PWM 計時器的計數器,將 PWM 計數器清零,獲取 SDK 提供的 PWM 輸出默認配置。程序沒有特別之處,屬于配置前的初始化工作。

配置 PWM 允許輸出,死區為 0,輸出不反相;

設置 RLD 與 STA,分別為 reload 和 0;
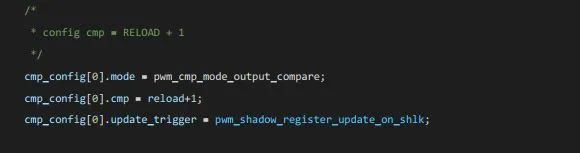
配置 CMPx,模式為輸出比較模式,比較值為 reload+1,影子寄存器更新方式為寫入 shlk 位更新;此時由于計數器計數無法達到 CMPx,故輸出波形恒為低電平。
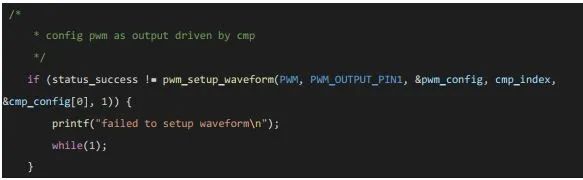
配置通道 0 使用 CMP0,比較器數量為 1 個,因此 CMP0 的大小決定了pwm 的占空比,占空比為(RLD-CMP0)/RLD

啟動計數器,更新 CMP0 的影子寄存器為 reload/4,最后將影子寄存器的值提交到寄存器內生效。運行結果如下:

審核編輯:劉清
-
寄存器
+關注
關注
31文章
5325瀏覽量
120052 -
比較器
+關注
關注
14文章
1637瀏覽量
107120 -
dma
+關注
關注
3文章
559瀏覽量
100447 -
pwm定時器
+關注
關注
0文章
6瀏覽量
1986
原文標題:看完這一篇,HPM6000系列PWM波盡在掌握(上)
文章出處:【微信號:HPMicro,微信公眾號:先楫半導體HPMicro】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
Stm32CubeMx基本定時器的概念
如何通過STM32的定時器輸出PWM?

單片機MSP430入門-理論⑦--定時器模塊-定時器A②

單片機MSP430入門理論⑧--定時器模塊-定時器A③
定時器的用法以及pwm的調速
一文詳解HPM6000系列PWM定時器模塊

看完這一篇,HPM6000系列PWM波盡在掌握(上)

看完這一篇,HPM6000系列PWM波盡在掌握(下)
關于軟件定時器的一些討論






 工商網監
工商網監
評論