") 點(diǎn)云分割技術(shù)的發(fā)展現(xiàn)狀及挑戰(zhàn)
點(diǎn)云分割技術(shù)的發(fā)展現(xiàn)狀及挑戰(zhàn)
點(diǎn)云分割技術(shù)是指將三維空間中的點(diǎn)云數(shù)據(jù)分割成若干個(gè)具有相似屬性(如形狀、顏色、紋理等)的區(qū)域,從而實(shí)現(xiàn)點(diǎn)云數(shù)據(jù)的理解和分析。點(diǎn)云分割技術(shù)廣泛應(yīng)用于自動(dòng)駕駛、無(wú)人機(jī)、虛擬現(xiàn)實(shí)等領(lǐng)域,是三維視覺(jué)領(lǐng)域中的重要研究方向之一。
目前,點(diǎn)云分割技術(shù)已經(jīng)實(shí)現(xiàn)了自動(dòng)化和智能化,分割效果也有了顯著提高。然而,點(diǎn)云分割技術(shù)仍然面臨著一些挑戰(zhàn),包括以下幾點(diǎn):
數(shù)據(jù)獲取與預(yù)處理
點(diǎn)云數(shù)據(jù)需要通過(guò)激光掃描或圖像采集等方式獲取,而獲取的點(diǎn)云數(shù)據(jù)存在噪聲、缺失等問(wèn)題,需要進(jìn)行預(yù)處理。預(yù)處理過(guò)程需要耗費(fèi)大量的時(shí)間和計(jì)算資源,是點(diǎn)云分割技術(shù)中的重要挑戰(zhàn)之一。
特征提取與分割算法
點(diǎn)云分割算法需要從點(diǎn)云數(shù)據(jù)中提取出形狀、顏色、紋理等特征,并進(jìn)行分割。然而,點(diǎn)云數(shù)據(jù)的復(fù)雜性、多樣性和噪聲等問(wèn)題,使得特征提取和分割算法的設(shè)計(jì)與實(shí)現(xiàn)具有較大難度。
分割結(jié)果的評(píng)價(jià)與優(yōu)化
點(diǎn)云分割算法的分割結(jié)果需要進(jìn)行評(píng)價(jià)和優(yōu)化,以確保分割結(jié)果的準(zhǔn)確性和可靠性。目前,常用的評(píng)價(jià)方法包括IoU(Intersection over Union)指標(biāo)、 Chamfer距離等,但這些方法僅能對(duì)分割結(jié)果的準(zhǔn)確性進(jìn)行定量評(píng)價(jià),無(wú)法對(duì)分割結(jié)果的質(zhì)量進(jìn)行定性分析。
實(shí)時(shí)應(yīng)用需求
點(diǎn)云分割技術(shù)需要面對(duì)實(shí)時(shí)應(yīng)用的需求,例如自動(dòng)駕駛、無(wú)人機(jī)等。因此,分割算法的效率需要提高,以適應(yīng)實(shí)時(shí)應(yīng)用的需求。
數(shù)據(jù)堂以數(shù)據(jù)安全為第一服務(wù)準(zhǔn)則。無(wú)論是標(biāo)注環(huán)境的保密性,還是標(biāo)注工具及設(shè)備的安全性,標(biāo)注平臺(tái)的穩(wěn)定性,數(shù)據(jù)堂都力求完美,嚴(yán)格保障。擁有3個(gè)數(shù)據(jù)處理基地,5000名專業(yè)數(shù)據(jù)標(biāo)師,專業(yè)質(zhì)檢團(tuán)隊(duì),10多年項(xiàng)目管理和質(zhì)檢經(jīng)驗(yàn),數(shù)據(jù)準(zhǔn)確率高達(dá)96%-99%。支持3D點(diǎn)云、語(yǔ)義分割、TTS等轉(zhuǎn)化數(shù)據(jù)標(biāo)注服務(wù)。
總之,點(diǎn)云分割技術(shù)是一項(xiàng)重要的計(jì)算機(jī)視覺(jué)技術(shù),具有廣泛的應(yīng)用前景。隨著人工智能技術(shù)的不斷發(fā)展,點(diǎn)云分割技術(shù)也將不斷進(jìn)步和完善,為三維視覺(jué)領(lǐng)域提供更加準(zhǔn)確、高效的分割效果和分析能力。
審核編輯黃宇
-
算法
+關(guān)注
關(guān)注
23文章
4599瀏覽量
92642 -
點(diǎn)云數(shù)據(jù)
+關(guān)注
關(guān)注
0文章
13瀏覽量
1504
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
醫(yī)療機(jī)器人發(fā)展現(xiàn)狀與趨勢(shì)
工控機(jī)廠家發(fā)展現(xiàn)狀及未來(lái)趨勢(shì)

國(guó)產(chǎn)光電耦合器:2024年的發(fā)展現(xiàn)狀與未來(lái)前景

2.晶體和振蕩器 行業(yè)研究及十五五規(guī)劃分析報(bào)告(行業(yè)發(fā)展現(xiàn)狀及“十五五”前景預(yù)測(cè))
STM32國(guó)內(nèi)外發(fā)展現(xiàn)狀
萬(wàn)兆電口模塊的產(chǎn)業(yè)發(fā)展現(xiàn)狀與前景展望
工程振弦采集儀監(jiān)測(cè)技術(shù)的發(fā)展現(xiàn)狀與展望

區(qū)塊鏈技術(shù)發(fā)展現(xiàn)狀和趨勢(shì)
乘用車(chē)一體化電池的發(fā)展現(xiàn)狀和未來(lái)趨勢(shì)

博捷芯BJCORE:劃片機(jī)行業(yè)背景、發(fā)展歷史、現(xiàn)狀及趨勢(shì)
光伏行業(yè)發(fā)展現(xiàn)狀與發(fā)展趨勢(shì)報(bào)告

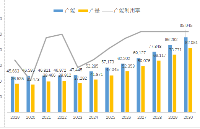
從融資看通信行業(yè)發(fā)展現(xiàn)狀
金屬殼體封裝技術(shù)的現(xiàn)狀與發(fā)展前景






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論