 超級電容器在微型電網中的應用
超級電容器在微型電網中的應用
為了保證某些重要負荷在系統外部故障時的正常供電,出現了一種分布式電源與負荷單獨構成小型電力系統的運行方式;分布式電源與負荷構成的小系統稱為微型電網(微網),微網的電壓等級在400V以下,即為配電網電壓等級。外部無故障時,微網與主網(配電網)連接,這種運行狀態稱為聯網運行;外部故障時,微網與主網解列,這種運行方式稱為孤島運行。當微網中的總發電容量小于總負荷需求時,對于長期的外部故障,孤島運行時應將次要負荷切除,但是對于幾秒就能恢復的瞬時故障。從供電穩定性和經濟性的角度來看,這對次要負荷不利。因此,本文提出在外部故障后,用超級電容器向孤島運行的微網提供短時功率缺額,維持所有負荷并等待重合于主網。文中用理論和仿真證明了此方法的合理性。
1.微網建模
本文在MATLAB軟件中的Simulink環境下建立模型,系統簡化模型見圖1。當KA閉合時。微網處于聯網運行狀態;當微網外部故障時,KA打開。微網進入孤島運行。
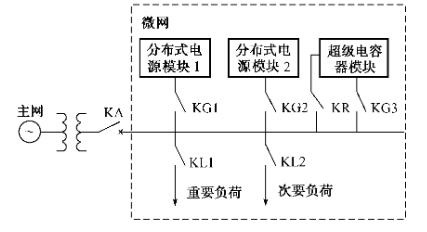 圖1 系統簡化模型
圖1 系統簡化模型元件參數說明如下:
(l)主網。電壓等級30kV﹐短路容量100MVA,X/R=7。
(2)變壓器。額定容量100kVA,dl1,Yn接法,電壓比30kV/400V,R=0.97Ω,x=35Ω。
(3)重要負荷。1臺異步鼠籠式電動機,額定狀態運行時P=39.7kW,Q=38.8kvar,最大負載轉知矩238N.m,額定轉速1480r/min,其他參數為MATLAB提供的典型參數:電阻性負荷10kW,電機負荷占總負荷比例為78.7%。
(4)次要負荷。1臺異步鼠籠式電動機,額定狀態運行時P=l6.6kW,Q=13.6kvar.最大負載轉矩98N.m,額定轉速1460r/min,其他參數為MATLAB提供的典型參數;電阻性負荷6.5kW,電機負荷占總負荷比例為70%。
(5)分布式電源模塊。現有的分布式電源有光伏電池、燃料電池、風力發電機。微型燃氣輪機等,機端電壓或為直流電壓,或為高頻電壓,不能直接接于電網;而要經過逆變器或者整流器+逆變器等功率變換器件,使電壓幅值頻率和相位與電網相匹配后再并入電網。同時可利用功率變換器件的可控性來實現不同的控制方式,分布式電源模塊簡化圖見圖2。微網中分布式電源模塊的控制方式主要有2種:定功率控制和定電壓控制,在定功率控制方式下,分布式電源向系統注入預定數值的有功和無功功率。原理圖見圖3;在定電壓控制方式下,逆變器利用反饋電壓以調節交流側電壓來保證電壓的穩定,原理圖見圖4。以下各圖中,TV為電壓互感器,TA為電流互感器,PLL為鎖相環。
分布式電源采用標準同步發電機模型,額定功率35kVA,額定電壓600V,電壓頻率100Hz。
(6)超級電容器模塊。超級電容器(組)可以通過整流器從電網吸收能量,也可經由逆變器向電網注入功率。超級電容器模塊簡化圖見圖5。微網聯網運行時,KR閉合,KG3打開,系統向電容器充電;在KA打開。進入孤島運行的同時,KG3閉合﹐KR打開。超級電容器以定電壓控制方式短時維持所有負荷正常運行,控制原理見圖4。
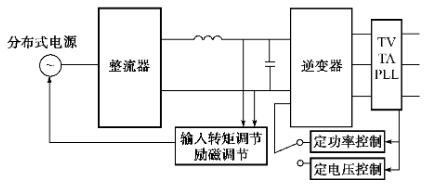 圖2 分布式電源模塊
圖2 分布式電源模塊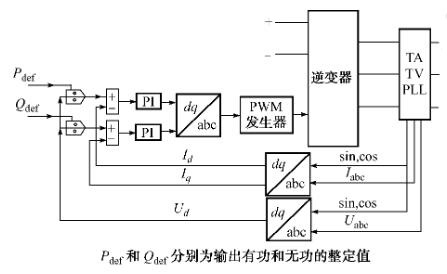 圖3 恒定輸出功率控制原理
圖3 恒定輸出功率控制原理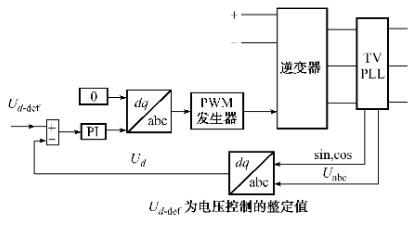 圖4 恒定電壓控制原理
圖4 恒定電壓控制原理2.微網聯網運行控制
當圖1中的開關KA閉合時。微網即處于聯網運行狀態,系統的電壓和頻率由主網進行調節,分布式電源模塊在定功率控制模式下。向系統恒定輸出有功功率28kW,無功功率20kvar,即設定Pdef=28kW,Qdef= 20kvar,且在不超過發電機額定容量的前提下,有功功率和無功功率的數值可以任意調節。聯網運行仿真中,KA保持閉合,0.5s時KGl和KG2閉合,即分布式電源模塊并入電網。仿真結果見圖6。可以看出,電機的啟動和分布式電源的并網都對電網造成了擾動,前者在0.5s內達到穩定,后者在0.2s內達到穩定。穩定后分布電源模塊按設定值向系統注入有功功率和無功功率,主網輸出功率隨之降低,系統電壓無明顯波動。
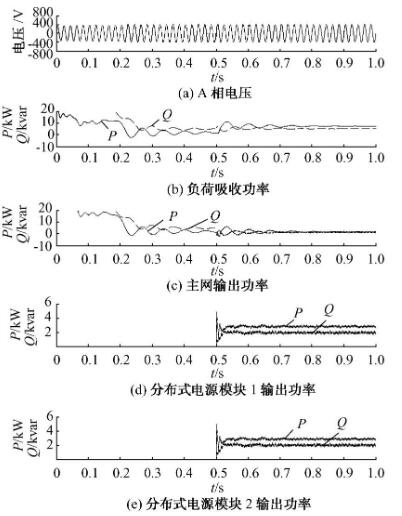 圖6 聯網運行仿真結果
圖6 聯網運行仿真結果3.微網孤島運行
3.1微網孤島運行控制
開關KA因左側的主網發生故障而跳開時,微網即進入孤島運行。孤島運行的控制流程見圖7。
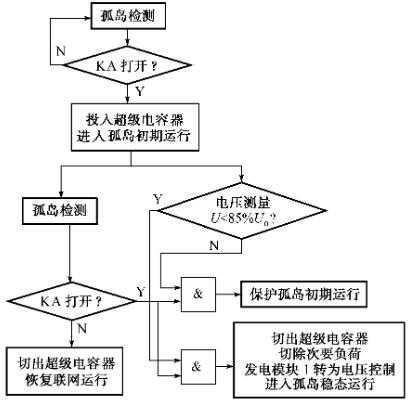 圖7 孤島運行控制流程
圖7 孤島運行控制流程孤島檢測裝置檢測開關KA的狀態,KA打開為”Y”閉合為"N”。孤島初期運行狀態的定義為:孤島運行中。所有分布式電源模塊以定功率控制。超級電容器以定電壓控制,且不切除任何負荷的運行狀態。孤島初期運行發生在由聯網進入孤島后的2s左右,其有2種結束方式:一是外部故障恢復,KA重新閉合,微網恢復聯網運行,分布電源模塊控制方式不變,超級電容器由向系統注入能量轉為吸收能量,為下一次孤島運行做準備;二是當超級電容器的能量將消耗殆盡,但微網仍未與主網重合時,則切出超級電容器,切除次要負荷,分布式電源模塊1轉為定電壓控制,此時的運行狀態定義為:孤島穩態運行狀態。因為微網的電壓會隨著超級電容器能量的消耗而逐漸降低,所以使用電壓測量模塊來決定微網從孤島初期運行轉入穩態運行的時機。但為了充分利用超級電容器,并盡可能長時間地保持住所有負荷來等待與主網重合,且考慮到低壓運行的時間并不太長,本文提出將電壓偏差限定改為+15%。
3.2超級電容器參數選擇
由于超級電容器單體電壓低,模塊化的也不超過100V,所以仿真中使用多個超級電容器串。并聯來提高直流電壓和電容值,根據前述負荷以及分布式電源模塊參數,要在孤島運行初期保持所有負荷正常運行,超級電容器模塊輸出視在功率Sc=16.4kVA。
低壓電網中,保護動作時時間為0~2.5s,加上重合閘的時間,取孤島初期運行時間為1.5s,在此期間超級電容器模塊輸出功率為Sc,輸出總的能量Wc至少為:

三相橋式電壓型逆變電路輸出三相線電壓基波幅值U=0.78Uc(Uc為超級電容器電壓),本文中低壓電網電壓為400V,那么只有在Uc=≥512.8V時超級電容器才能向微網供電,否則就會從微網吸收能量,所以在超級電容器放電1.5s后電壓仍要求在512V之上。超級電容器的電容C取0.2F,電容能量計算公式為:

式中:UC為電容器初始電壓,UT為放電后的電壓;如前所述,UT要高于512.8V,則可算得:

考慮一定裕量,取UC為800V。
4.故障仿真分析
4.1瞬時故障仿真
本節對主網發生的瞬時故障時,有超級電容器和無超級電容器的情況進行仿真分析,分布式電源模塊在0.5s并入主網,均以定功率控制,ls時刻KA因為主網故障而跳開,經過1.5s后KA重合,故障過程中分布式電源模塊控制方式不變。仿真波形見圖8圖9。
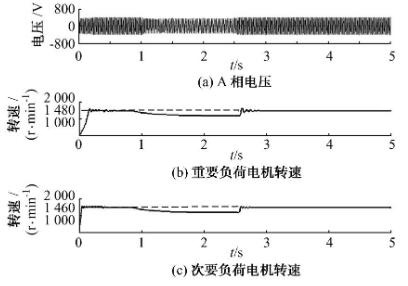
圖8 瞬時故障仿真結果(無超級電容器)
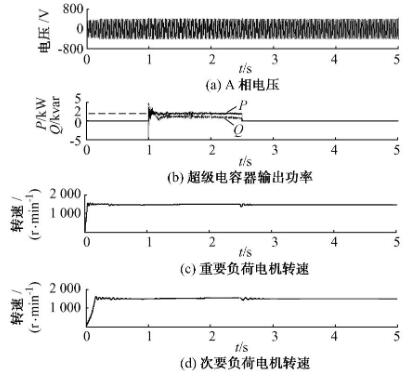
圖9 瞬時故障仿真結果(有超級電容器)
由圖8可見,由于微網總發電功率小于負荷需求,當沒有超級電容器時微網進入孤島運行后,系統電壓在0.2s內迅速降至額定電壓的75%,重要負荷電機和次要負荷電機轉速分別降至89%和88%額定轉速。為了保證重要負荷正常運行,則必須在進入孤島運行的同時切掉次要負荷,并將分布式電源模塊1的控制方式轉為定電壓控制,即提前進入微網穩態運行。由于僅過1.5s左右微網將與主網重合·所以因瞬時故障而切除次要負荷,從供電穩定性和經濟性的角度來看都是不合適的。
有超級電容器時,微網進入孤島運行時即投入超級電容器,并以定電壓控制方式填補功率缺額,保持電壓穩定。分布式電源模塊保持定功率控制方式不變。從圖9可以看出,由于超級電容器的存在微網進入孤島時電壓僅在前5個周期大于額定值,第3個周期幅值最大,為額定電壓的104%,之后恢復為額定值;電動機的最大轉速下降了50r/min,在0.1s后恢復正常轉速。2.5s時KA閉合結束孤島初期運行超級電容器停止對微網的控制轉而通過整流器吸收能量,直至達到額定電壓;由于電壓的擾動,電動機的轉速發生衰減振蕩并在0.5s內結束,最大振幅為80r/min。
4.2永久故障仿真
發生永久故障后,若無超級電容器。則所有負荷均不能正常運行,而且電壓下降過大時電機轉速將逐漸降低而最終堵轉,只能通過切負荷進入孤島穩態運行。有超級電容器時,系統控制方式與發生瞬時故障時相同,即微網進入初期運行。為了最大限度地維持所有負荷:等待重合到主網。本文且將電壓偏差限定改為±l5%,當電壓檢測模塊檢測到系統電壓低于額定電壓的85%時。再切除次要負荷和超級電容器,分布式電源模塊1改為定電壓控制,進入穩態運行,仿真結果見圖10。
如圖10所示,在約3.6s時,系統電壓降為額定電壓的85%,因此,控制環節在此切除次要負荷電機和超級電容器,此后系統電壓恢復到額定值,重要負荷電機恢復正常運行,由于設定電壓最大偏差為15%%,從而造成了重要電機負荷轉速最低降到600r/min,在實際中還應根據電機轉速偏差指標來定義最大電壓偏差。
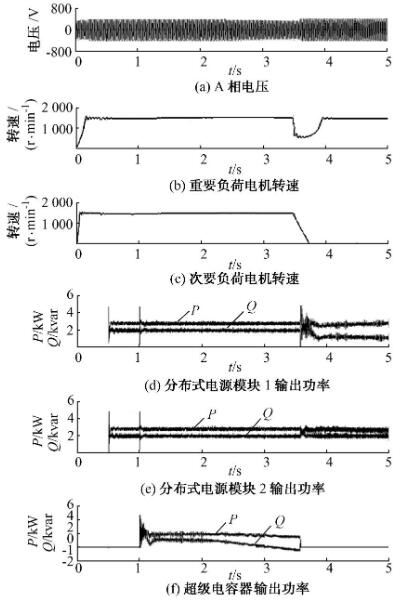
圖10 永久故障仿真結果(有超級電容器)
結束語
以上就是超級電容器在微型電網中的應用介紹了。當總發電功率小于總負荷的微網,有超級電容器時,在進入孤島運行后的2s左右時間內進行孤島初期運行——不切負荷、不調整分布式電源模塊的控制模式,并由超級電容器補充功率不足。維持系統電壓穩定,等待與主網重合。當外部故障為瞬時故障時,故障消失后微網恢復聯網運行,超級電容器轉為從主網吸收能量,為下一次投入做準備;當為永久故障時,在電壓偏差超過額定值之后,再進入孤島穩態運行。仿真結果證明,超級電容器引入微型電網后,提高了微網抗瞬時故障的能力,最大程度地保證了次要負荷的運行,提高了供電可靠性和經濟性。
-
電容器
+關注
關注
64文章
6202瀏覽量
99311 -
微型電網
+關注
關注
0文章
3瀏覽量
6167
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論