 工業機器人的應用與發展!
工業機器人的應用與發展!
工業機器人廣泛應用于制造業、汽車工業、電子工業、食品工業、醫療設備等領域,主要用于生產線上的自動化加工、裝配、搬運、焊接、噴涂等工作。工業機器人可以提高生產效率、降低生產成本、提高產品精度和質量,同時也可以減少人工勞動強度和安全風險。本文介紹了部分種類工業機器人的應用與發展。 - 文章信息 -
本文引自:《智能制造裝備基礎》。作者:吳玉厚、陳關龍、張珂、趙德宏、鞏亞東、劉春時。由「智造苑」原創首發, 數字化企業經授權發布。 隨著科技的不斷進步和人工智能技術的發展,工業機器人的應用和發展也在不斷擴大。現代工業機器人已經具備了更高的靈活性和自主性,可以根據實際需要進行編程和控制,以適應不同的生產環境和工藝要求。同時,工業機器人的智能化程度也在不斷提高,可以通過視覺識別、語音識別、深度學習等技術實現更加精準的操作和決策。 1
搬運機器人的應用與發展
1)搬運機器人的功能
搬運作業是指用一種設備(或機器、裝置)握持工件(或物品),使之從一種制造加工狀態(或位置)移動到另一種制造加工狀態(或位置)的過程。搬運機器人就是用于實現自動化搬運作業的工業機器人,廣泛運用于化工、食品加工、包裝物流行業等諸多領域,并向其他領域不斷地延伸和發展。搬運機器人主要有以下優點:
(1)改善物流管理和調度的能力。
(2)滿足柔性的場地要求和滿足特殊工作環境需求。
(3)負載能力強。
(4)具有高動態特性,工作效率高;搬運精度高。
(5)簡單經濟、易維修、使用壽命長,一般壽命可達20年。
2)搬運機器人系統組成
搬運機器人是一個完整系統。以關節式搬運機器人為例(見圖1),其工作站主要由操作機、控制系統、搬運系統(氣體發生裝置、真空發生裝置和手爪等)和安全保護裝置組成[1]。
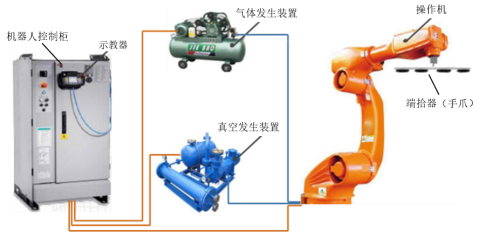
圖1 搬運機器人系統組成
3)搬運機器人技術發展
搬運機器人技術是機器人技術、搬運技術和傳感技術的融合。針對搬運機器人的開發會重點放于對其各項性能的完善上,主要體現的發展趨勢如下:
(1)高負載。對于搬運機器人的承載能力要求會有較大提高,其所能承載的重量將會越來越大;如ABB公司推出的IRB 6660-100/3.3,就旨在解決坯件大、重、距離長等壓機上下料的難題。
(2)高可靠性。在搬運機器人的工作過程中,其運行的穩定性十分重要,若是在工作過程中發生了較多的故障,極有可能導致搬運機器人將物料損壞;如日本FANUC公司推出的 FANUC R-2000iB,有緊湊的手腕結構、狹小的后部干涉區域、可高密度布置機構、高可靠性等特點。
(3)和諧的人機交互。搬運機器人愈加常見于人們的生活中,因此有必要提高搬運機器人與人類的交流,可以有效地提高效率。
(4)智能化。隨著個性化需求和服務的增長,傳統的制造模式將無法滿足多樣化生產的需求,需要升級到具有個性化定制能力的智能制造模式。不只是要求搬運機器人完成預定的工作,還要求搬運機器人根據環境的變化做出適當的反應;如FANUC公司推出的機器人控制柜R-30iA,內置視覺功能、散堆工件取出功能、故障診斷功能優點,可實現散堆工件搬運,一定程度上實現機器人的智能化與網絡化。
2
碼垛機器人的應用與發展
1)碼垛機器人的功能
碼垛機器人是在物流生產線末端取代工人或碼垛機完成工件自動碼垛功能的設備,是機械與計算機程序有機結合的產物。碼垛機器人能在工業生產過程中實現大批量工件、包裝件的快速獲取、搬運、裝箱、堆垛、拆垛等作業,是可以集成在生產線上任意階段的高新機電產品。碼垛機器人主要有以下優點:
(1)結構簡單、故障率低、性能可靠、保養維修方便;占地面積少,操作范圍大。
(2)適應性強,可根據不同的產品類型和實際需求進行編程來滿足需求。
(3)智能程度高,可根據設定的信息對貨物進行識別,送至不同位置。
(4)操作簡單,可在控制柜屏幕上操作,示教方法簡單易懂。
(5)能耗低,碼垛機功率在26kW左右,而碼垛機器人功率僅為5kW左右。
2)碼垛機器人系統組成
如圖2所示,碼垛機器人系統主要由操作機、控制系統、碼垛系統(氣體發生裝置、液壓發生裝置)和安全保護裝置組成。
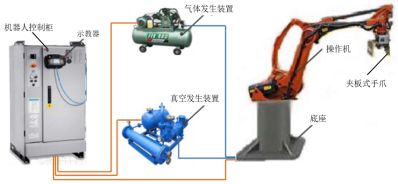
圖2 碼垛機器人系統組成
3)碼垛機器人技術發展
在全球生產制造最大利益化趨勢下,碼垛逐漸成為各個企業生產的瓶頸。為了能夠適應不斷變化的商品對于碼垛的要求,讓碼垛機器人盡可能更好地服務工業生產,必須解決限制碼垛機器人技術發展的因素,針對碼垛機器人的新功能、新特點進行創新和發展,使得整個包裝物流業逐漸向“自動化、無人化”發展。碼垛機器人未來主要發展趨勢如下:
(1)自動化程度不斷提高。機電綜合技術將會成為碼垛機器人發展的主流,碼垛機器人自動化主要包括自動控制和自動檢測,微電子、紅外線、傳感器等新技術,尤其是微小型計算機的廣泛使用會使碼垛機器人的自動控制和自動檢測水平飛速提升,從而大大提高碼垛質量。
(2)模塊集成化。采用模塊化結構不僅能夠讓碼垛機器人最大限度地滿足不同物品對機器人的要求,同時可以讓設備的設計和制造更方便,能夠降低成本、縮短生產周期。如KUKA 公司的KRC4控制器將安全控制、機器人控制、運動控制、邏輯控制及工藝控制集中在一個開放高效數據標準構架中,具有高性能、可升級和靈活性等特點,實現了機器人部分的模塊集成。
(3)功能多樣化。近年來由于多品種、小批量商品市場的不斷壯大以及中、小型用戶的急劇增加,多功能通用碼垛機器人的發展速度越來越快,應用前景也十分開闊。
(4)高速化。不僅要促進單機高速化,而且要提高碼垛系統的高速化;在不斷提升自動化程度的前提下,不斷改進碼垛機器人的結構,讓整個碼垛系統的高速化向更深的層次發展。如ABB公司推出的全球最快碼垛機器人IRB-460,操作節拍可到達2190次/h,運行速度比常規機器人提升15%。
3
焊接機器人的應用與發展
1)焊接機器人的功能
焊接機器人是替代人類從事焊接(包括切割與噴涂)的工業機器人。焊接機器人集焊接技術、計算機控制、數控加工等多種知識領域于一體,在制造業中的應用數量逐年增加,焊接機器人的使用可以提高焊接生產效率,改善工作人員的勞動條件,穩定和保證產品質量,易于實現產品的差異化生產,并能夠推動相關產業自動化升級改造。通常所說的焊接機器人包括:點焊機器人、弧焊機器人、激光焊接機器人、攪拌摩擦焊接機器人、等離子焊接機器人等,其中點焊、弧焊和激光焊接機器人應用比較普遍。焊接機器人主要有以下優點:
(1)穩定和提高焊接質量,保證其均勻性。采用機器人焊接時,每條焊縫的焊接參數都是恒定的,焊縫質量受人為因素影響較小,焊接質量穩定。
(2)改善了勞動條件,提高了勞動生產率。采用機器人焊接,工人只需要裝卸工件,遠離了焊接弧光、煙霧和飛濺等有害環境,使工人從高強度的體力勞動中解脫出來,并且實現24小時連續生產。
(3)產品周期明確,容易控制產品產量。
2)焊接機器人系統組成
根據焊接工藝的不同,焊接機器人的系統組成也略有不同,基本可以分為機器人系統和焊接系統兩部分,具體點焊機器人、弧焊機器人、激光焊接機器人系統組成分別如圖3~圖5所示。
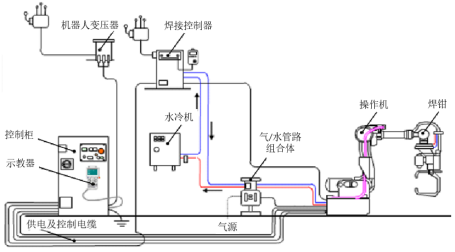
圖3 點焊機器人系統組成

圖4 弧焊機器人系統組成
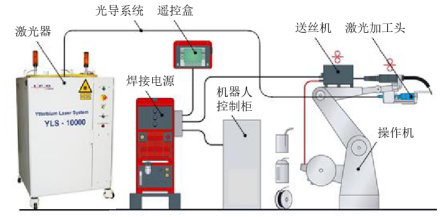
圖5 激光焊接機器人系統組成
3)焊接機器人技術發展
焊接是一個高度非線性、多變量、多種不確定因素作用的過程,使得控制焊縫成形質量極為困難,機器人焊接領域的發展需要采用計算機技術、控制技術、信息和傳感技術、人工智能等多學科知識,實現焊接電源靜動特性的無級控制、焊接初始位置的自主識別、焊縫實時跟蹤、焊接熔池動態特征信息獲取、焊接參數自適應調節等,以確保焊接質量和提高焊接效率。
焊接機器人未來主要發展趨勢如下:
(1)智能化水平更高。未來焊接機器人需要提高對加工模式及工作環境的識別能力,能夠及時發現問題并提出解決方案加以實施,創建能夠從有限的數據中快速學習的系統。
(2)離線編程仿真技術應用更廣。目前使用的示教再現編程耗時長,機器人長期處于空置狀態,影響加工效率。離線編程及計算機仿真技術將工藝分析、程序編制、工藝調整等工作集中于離線操作,不影響焊接機器人的正常生產,這將在提高生產率方面起到積極的作用。
(3)向基于PC機的通用型控制轉變。焊接機器人已經開始從之前特定的控制器控制向基于PC機的通用型控制轉變,從而把聲音識別、圖像處理、人工智能等一系列研究成果更好地應用于實際工程生產中。
(4)多智能焊接機器人調控技術應用。在工業上可以根據生產需要將各種功能的機器人組裝成一個群組加工平臺,更適用于流水線式生產操作;如YASKAWA公司推出的機器人控制柜可以協調控制多達72個軸,更好地為群組作業服務。
(5)焊接技術更加柔性化、網絡化。將各種光、機、電技術與焊接技術有機結合,以實現焊接的精密化和柔性化;如FANUC公司的R-0iA與林肯新型弧焊電源之間實現了數字通訊,網絡化水平更高。
4
裝配機器人的應用與發展
1)裝配機器人的功能
裝配機器人是工業生產中用于裝配生產線上對零件或部件進行裝配的一類工業機器人。裝配機器人作為柔性自動化裝配作業線的核心設備,在不同裝配生產線上發揮著強大的裝配作用。裝配機器人主要有以下優點:
(1)操作速度快,加速性能好,縮短工作循環時間。
(2)精度高,具有極高的重復定位精度,保證裝配精度。
(3)能夠實時調節生產節拍和末端執行器的動作狀態;可以通過更換不同的末端執行器來適應裝配任務的變化,方便快捷。
(4)柔順性好,能夠與零件供給器、輸送裝置等輔助設備集成,能與其他系統配套使用,實現柔性化生產。
(5)多帶有視覺傳感器、觸覺傳感器、接近度傳感器和力傳感器等,大大提高了裝配機器人的作業性能和環境適應性,保證裝配任務的精準性。
2)裝配機器人系統組成
裝配機器人由裝配系統和機器人系統兩部分組成(見圖6),其中裝配系統主要包括:操作機、控制系統、裝配系統(手爪、氣體發生裝置、真空發生裝置或電動裝置)、傳感系統和安全保護裝置[2]。
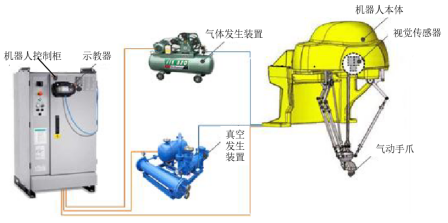
圖6 裝配機器人系統組成
3)裝配機器人技術發展
裝配機器人是集機械、電子、控制、計算機、傳感器、人工智能等多學科先進技術于一體的自動化裝備,已成為柔性制造系統、自動化工廠、計算機集成制造系統中代表性的自動化設備,經過長時間的發展,裝配機器人正逐步實現柔性化、無人化、一體化裝配工作。
裝配機器人未來主要發展趨勢如下:
(1)操作機結構的優化設計:探索新的高強度輕質材料,進一步提高負載/自重比,同時機構進一步向著模塊化、可重構方向發展;如日本川田工業株式會社推出的 NEXTAGE 裝配機器人具有15個軸,打破機器人定點安裝的局限,機器人底部配有移動導向輪,可適應不同結構的裝配生產線。
(2)直接驅動裝配機器人:傳統機器人減速裝置中的傳動鏈會增加系統功耗,產生慣量、誤差等,并降低系統可靠性,采用高扭矩低速電機直接驅動可避免此種問題。
(3)多傳感器融合技術:為進一步提高機器人的智能和適應性,多種傳感器融合是關鍵;如YASKAWA機器人公司推出的雙臂機器人SDA10F,具有15個軸,并配備VGA CCD 攝像頭,極大地促進了裝配準確性。
(4)機器人遙控及監控技術:通過網絡建立大范圍內的機器人遙控系統,在有時延的情況下,建立預先顯示進行遙控等。
(5)虛擬機器人技術:基于多傳感器、多媒體和虛擬現實以及臨場感技術,實現機器人的虛擬遙控操作和人機交互。
(6)并聯機器人應用范圍擴大:傳統機器人采用連桿和關節串聯結構,而并聯機器人執行機構的分布得到改善,可減少非累積定位誤差,和奇異位置數量。
(7)多智能體協調控制技術:這是目前機器人研究的一個嶄新領域,是對多智能體的群體體系結構、相互間的通信與磋商機理、感知與學習方法、建模和規劃、群體行為控制等方面進行研究;同時,也要關注同一機器人雙臂的協作,以及人與機器人的協作。
審核編輯 :李倩
-
傳感器
+關注
關注
2548文章
50678瀏覽量
752010 -
人機交互
+關注
關注
12文章
1200瀏覽量
55321 -
工業機器人
+關注
關注
91文章
3351瀏覽量
92560
原文標題:工業機器人的應用與發展!
文章出處:【微信號:數字化企業,微信公眾號:數字化企業】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
國內首個具身智能工業機器人領域報告重磅開啟!
工業機器人常用的編程方式
“快、準、穩”——阿普奇AK5在機械手領域的應用解決方案

工業機器人AMR的最強大腦,你了解多少?

abb工業機器人的編程語言是什么
基于飛凌嵌入式RK3568J核心板的工業機器人控制器應用方案
工業4.0中的機器人向協作機器人演進
高度集成的嵌入式處理器如何推動工業機器人的發展
高度集成的嵌入式處理器如何推動工業機器人的發展
工業機器人連接解決方案

基于智能制造的工業機器人應用實踐
LabVIEW的六軸工業機器人運動控制系統
工業機器人產業發展及應用現狀






 工商網監
工商網監
評論