 Server的通訊量與GPU數量呈線性關系
Server的通訊量與GPU數量呈線性關系
在數據并行上篇中,我們介紹了樸素數據并行(DP)與分布式數據并行(DDP)。兩者的總通訊量雖然相同,但DP存在負載不均的情況,大部分的通訊壓力集中在Server上,而Server的通訊量與GPU數量呈線性關系,導致DP一般適用于單機多卡場景。而DDP通過采用Ring-AllReduce這一NCCL操作,使得通訊量均衡分布到每塊GPU上,且該通訊量為一固定常量,不受GPU個數影響,因此可實現跨機器的訓練。
在上篇介紹中,通訊負載不均的優化我們解釋過了,但還遺留了一個顯存開銷問題:數據并行中,每個GPU上都復制了一份完整模型,當模型變大時,很容易打爆GPU的顯存,那要怎么辦呢?
今天這篇文章,我們將介紹由微軟開發的ZeRO(零冗余優化),它是DeepSpeed這一分布式訓練框架的核心,被用來解決大模型訓練中的顯存開銷問題。ZeRO的思想就是用通訊換顯存。如果初讀ZeRO,覺得它邏輯跳躍,晦澀難懂,那么這篇文章或許可以幫到你~全文結構如下:
一、存儲消耗
1.1 存儲分類
1.2 混合精度訓練
1.3 存儲大小
二、ZeRO-DP(),ZeRO與模型并行
三、ZeRO-R
四、ZeRO-offload與ZeRO-Infinity
五、參考
推薦閱讀:
圖解大模型訓練之:流水線并行,以GPipe為例
圖解大模型訓練之:數據并行上篇(DP, DDP)
一、存儲消耗
1.1 存儲分類
首先,我們來看在大模型訓練的過程中,GPU都需要存什么內容。
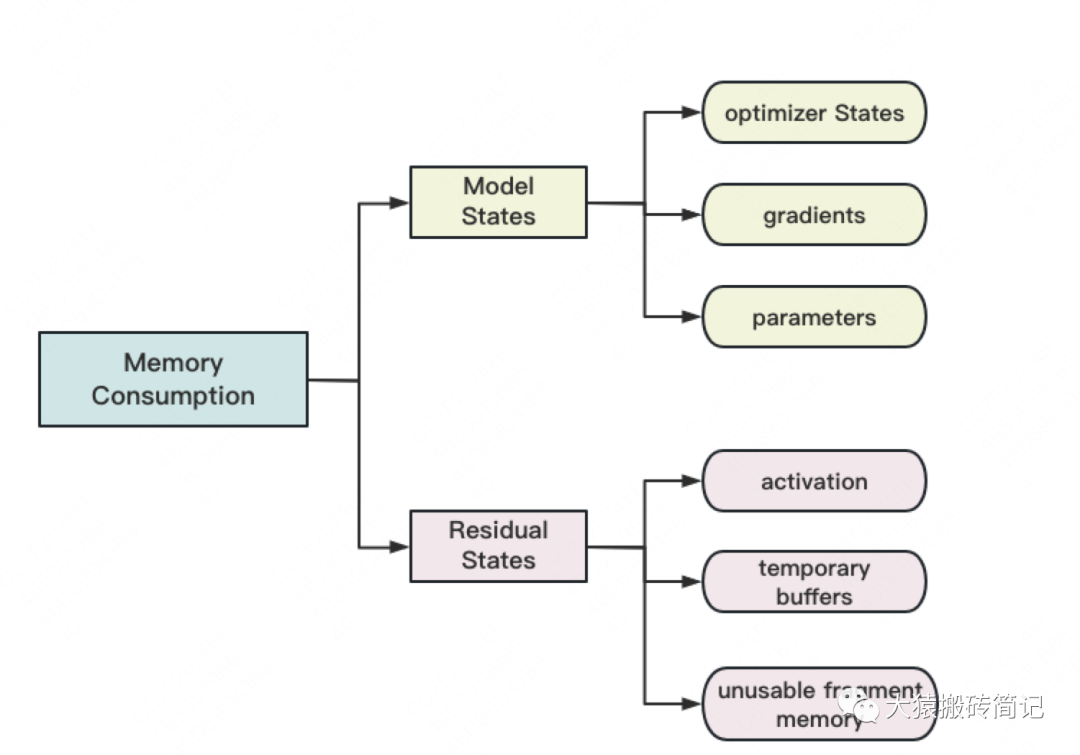
存儲主要分為兩大塊:Model States和Residual StatesModel States指和模型本身息息相關的,必須存儲的內容,具體包括:
optimizer states:Adam優化算法中的momentum和variance
gradients:模型梯度
Residual States指并非模型必須的,但在訓練過程中會額外產生的內容,具體包括:
activation:激活值。在流水線并行中我們曾詳細介紹過。在backward過程中使用鏈式法則計算梯度時會用到。有了它算梯度會更快,但它不是必須存儲的,因為可以通過重新做Forward來算它。
temporary buffers: 臨時存儲。例如把梯度發送到某塊GPU上做加總聚合時產生的存儲。
unusable fragment memory:碎片化的存儲空間。雖然總存儲空間是夠的,但是如果取不到連續的存儲空間,相關的請求也會被fail掉。對這類空間浪費可以通過內存整理來解決。
1.2 精度混合訓練
知道了存儲分類,進一步,我們想知道,假設模型的參數W大小是,那么每一類存儲具體占了多大的空間呢?
在分析這個問題前,我們需要來了解精度混合訓練。
對于模型,我們肯定希望其參數越精準越好,也即我們用fp32(單精度浮點數,存儲占4byte)來表示參數W。但是在forward和backward的過程中,fp32的計算開銷也是龐大的。那么能否在計算的過程中,引入fp16或bf16(半精度浮點數,存儲占2byte),來減輕計算壓力呢?于是,混合精度訓練就產生了,它的步驟如下圖:
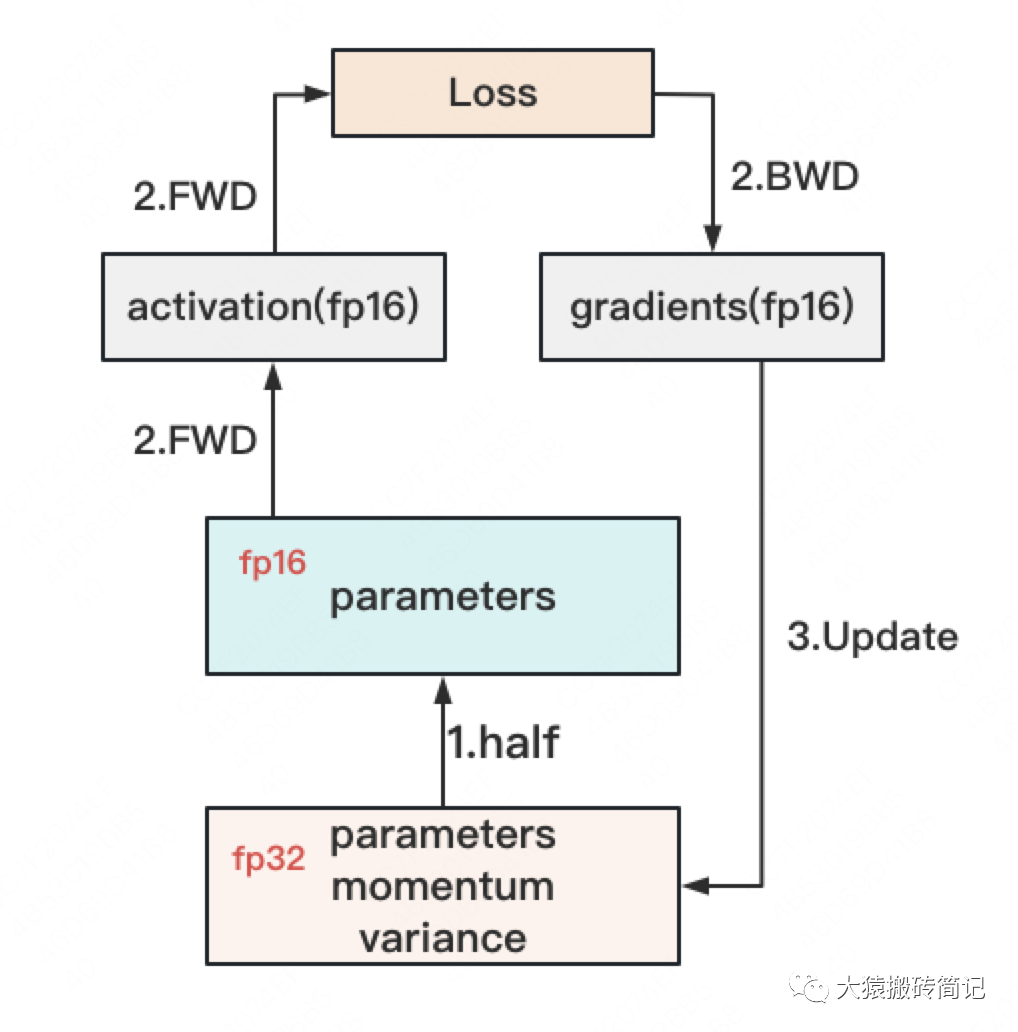
存儲一份fp32的parameter,momentum和variance(統稱model states)
在forward開始之前,額外開辟一塊存儲空間,將fp32 parameter減半到fp16 parameter。
正常做forward和backward,在此之間產生的activation和gradients,都用fp16進行存儲。
用fp16 gradients去更新fp32下的model states。
當模型收斂后,fp32的parameter就是最終的參數輸出。
通過這種方式,混合精度訓練在計算開銷和模型精度上做了權衡。如果不了解fp32,fp16和bf16的細節也沒關系,不影響下文的閱讀。只要記住它們所占的存儲空間和精度表達上的差異即可。
1.3 存儲大小
現在,我們可以來計算模型在訓練時需要的存儲大小了,假設模型的參數W大小是,以byte為單位,存儲如下:
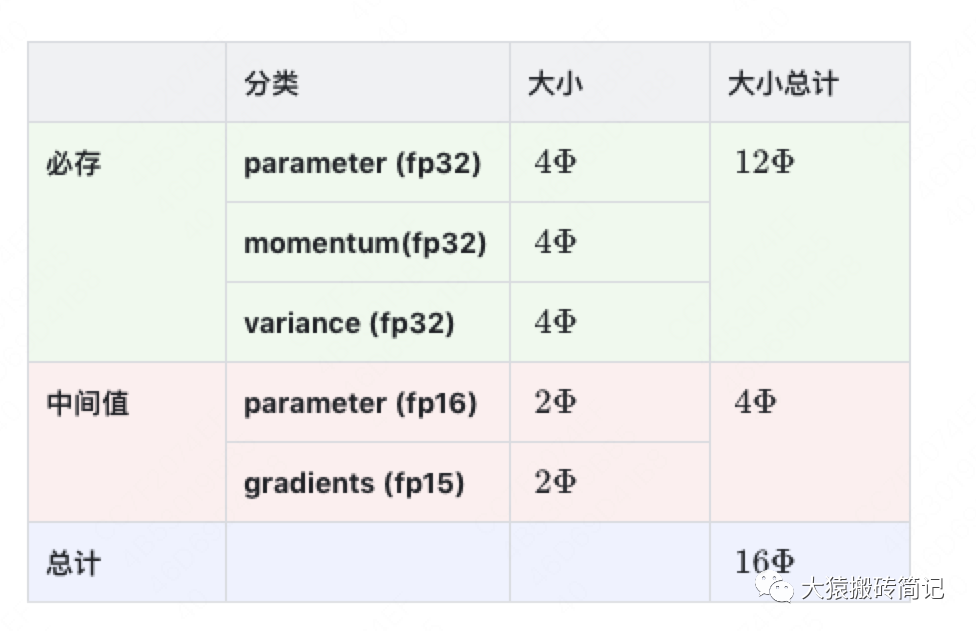
因為采用了Adam優化,所以才會出現momentum和variance,當然你也可以選擇別的優化辦法。因此這里為了更通用些,記模型必存的數據大小為。因此最終內存開銷為:
另外,這里暫不將activation納入統計范圍,原因是:
activation不僅與模型參數相關,還與batch size相關
activation的存儲不是必須的。存儲activation只是為了在用鏈式法則做backward的過程中,計算梯度更快一些。但你永遠可以通過只保留最初的輸入X,重新做forward來得到每一層的activation(雖然實際中并不會這么極端)。
因為activation的這種靈活性,納入它后不方便衡量系統性能隨模型增大的真實變動情況。因此在這里不考慮它,在后面會單開一塊說明對activation的優化。
二、ZeRO-DP
知道了什么東西會占存儲,以及它們占了多大的存儲之后,我們就可以來談如何優化存儲了。
注意到,在整個訓練中,有很多states并不會每時每刻都用到,舉例來說;
Adam優化下的optimizer states只在最終做update時才用到
數據并行中,gradients只在最后做AllReduce和updates時才用到
參數W只在做forward和backward的那一刻才用到
諸如此類
所以,ZeRO想了一個簡單粗暴的辦法:如果數據算完即廢,等需要的時候,我再想辦法從個什么地方拿回來,那不就省了一筆存儲空間嗎?
沿著這個思路,我們逐一來看ZeRO是如何遞進做存儲優化的。
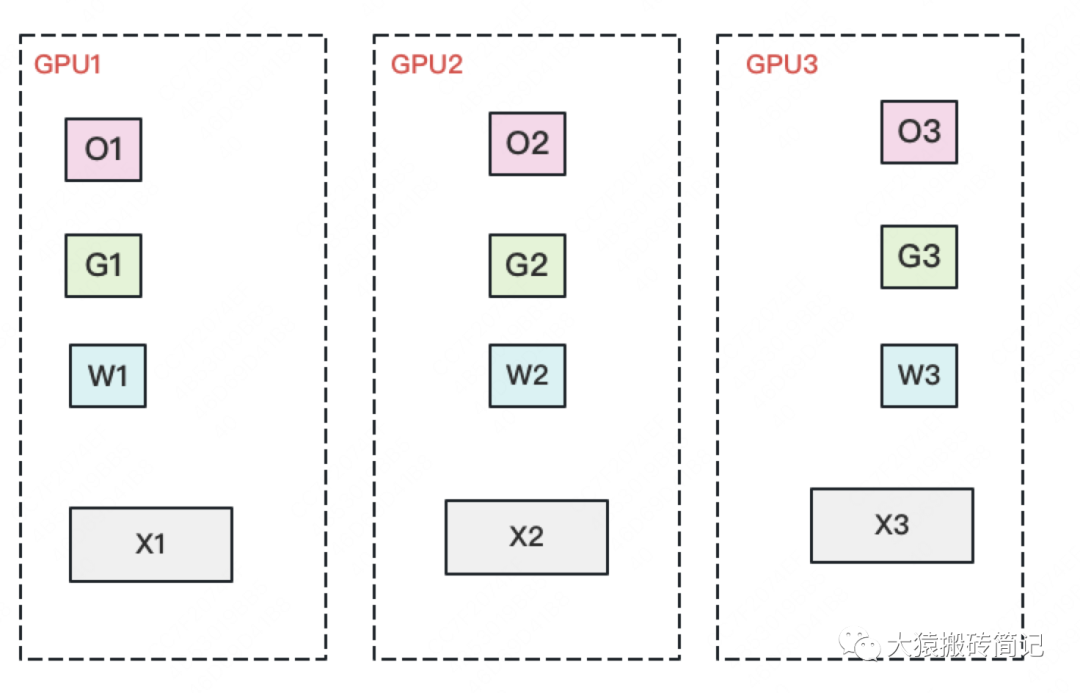
2.1 : Optimizer State Partitioning
首先,從 optimizer state開始優化。將optimizer state分成若干份,每塊GPU上各自維護一份。這樣就減少了相當一部分的顯存開銷。如下圖:
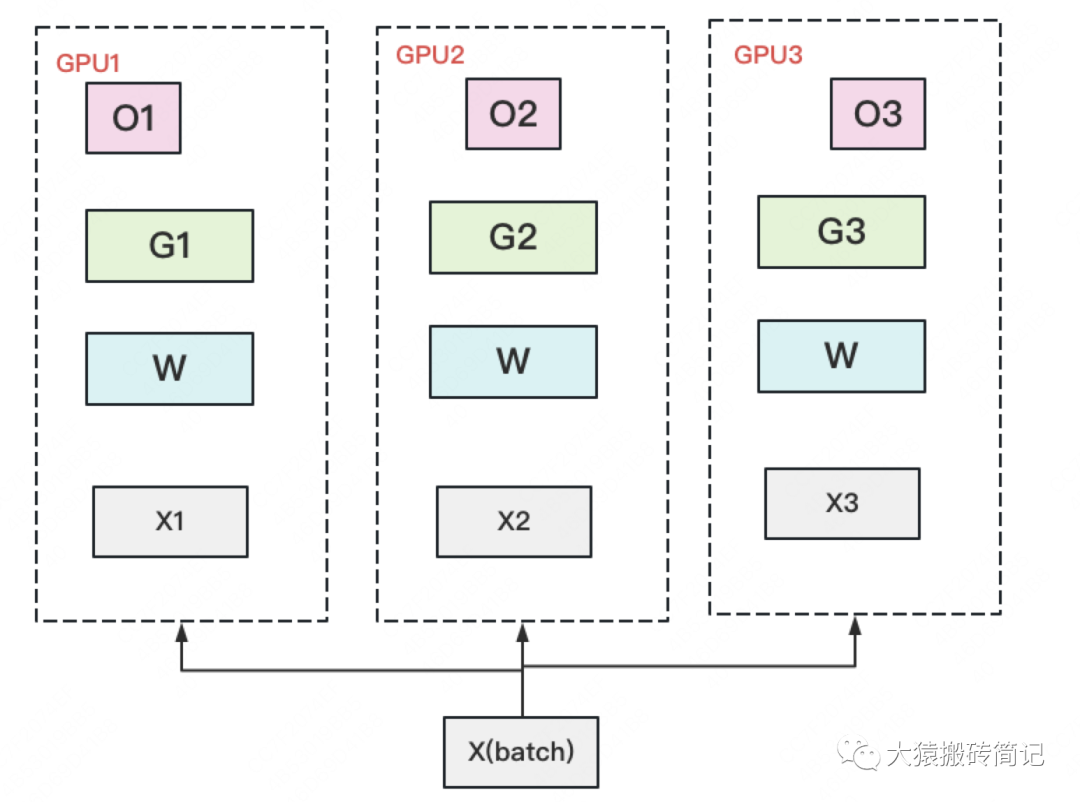
復習一下,此時W=fp16,G=fp16,O=fp32。此時,整體數據并行的流程如下:
(1)每塊GPU上存一份完整的參數W。將一個batch的數據分成3份,每塊GPU各吃一份,做完一輪foward和backward后,各得一份梯度。
(2)對梯度做一次AllReduce,得到完整的梯度G,產生單卡通訊量。為了表達簡明,這里通訊量我們就不再換算成byte了,而直接根據參數量來計算。對AllReduce(reduce-scatter + all-gather)不熟悉的朋友,可以先去看上一篇文章。
(3)得到完整梯度G,就可以對W做更新。我們知道W的更新由optimizer states和梯度共同決定。由于每塊GPU上只保管部分optimizer states,因此只能將相應的W(藍色部分)進行更新。(2)和(3)可以用下圖表示:
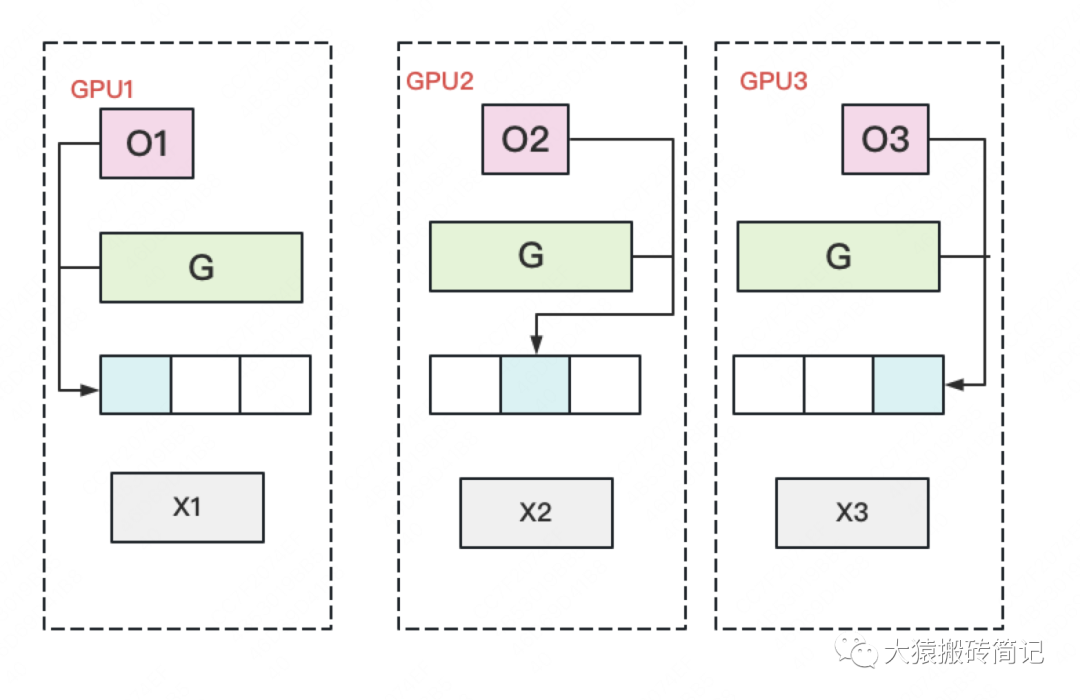
(4)此時,每塊GPU上都有部分W沒有完成更新(圖中白色部分)。所以我們需要對W做一次All-Gather,從別的GPU上把更新好的部分W取回來。產生單卡通訊量。
做完后,設GPU個數為,顯存和通訊量的情況如下:
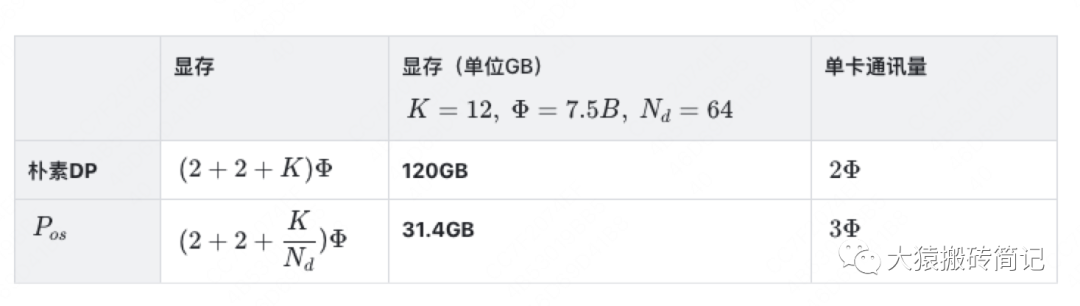
假設各變量大小如表格第二列所示,那么在增加1.5倍單卡通訊開銷的基礎上,將單卡存儲降低了4倍。看起來是個還不錯的trade-off,那么還能做得更好嗎?
2.2
現在,更近一步,我們把梯度也拆開,每個GPU格子維護一塊梯度。
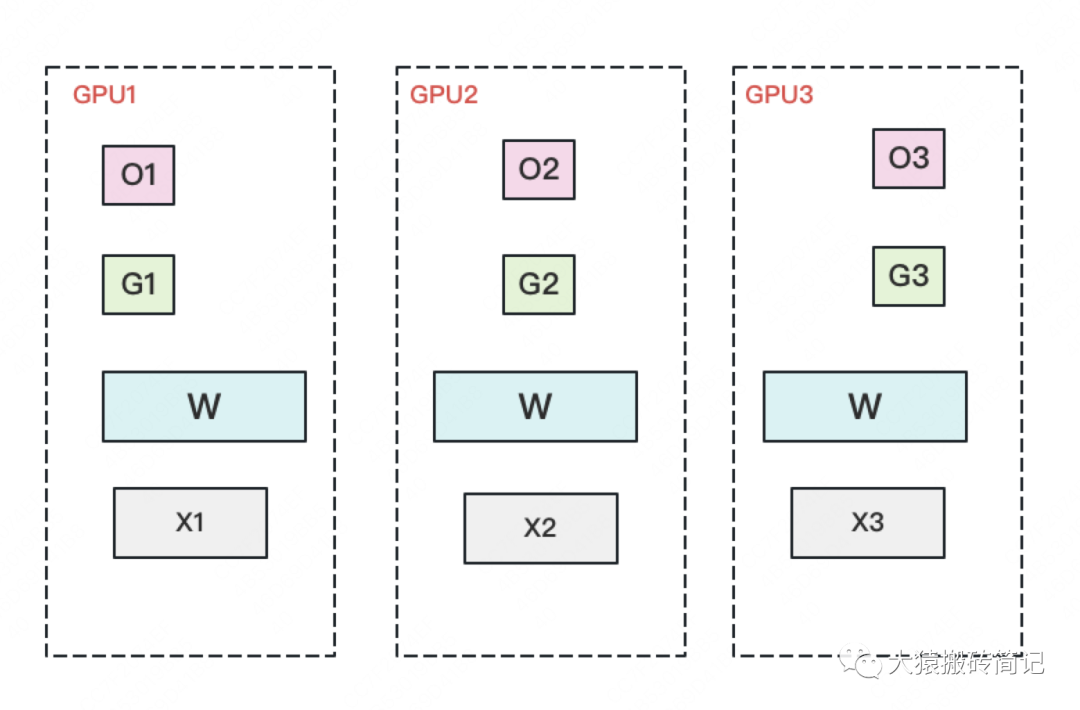
此時,數據并行的整體流程如下:
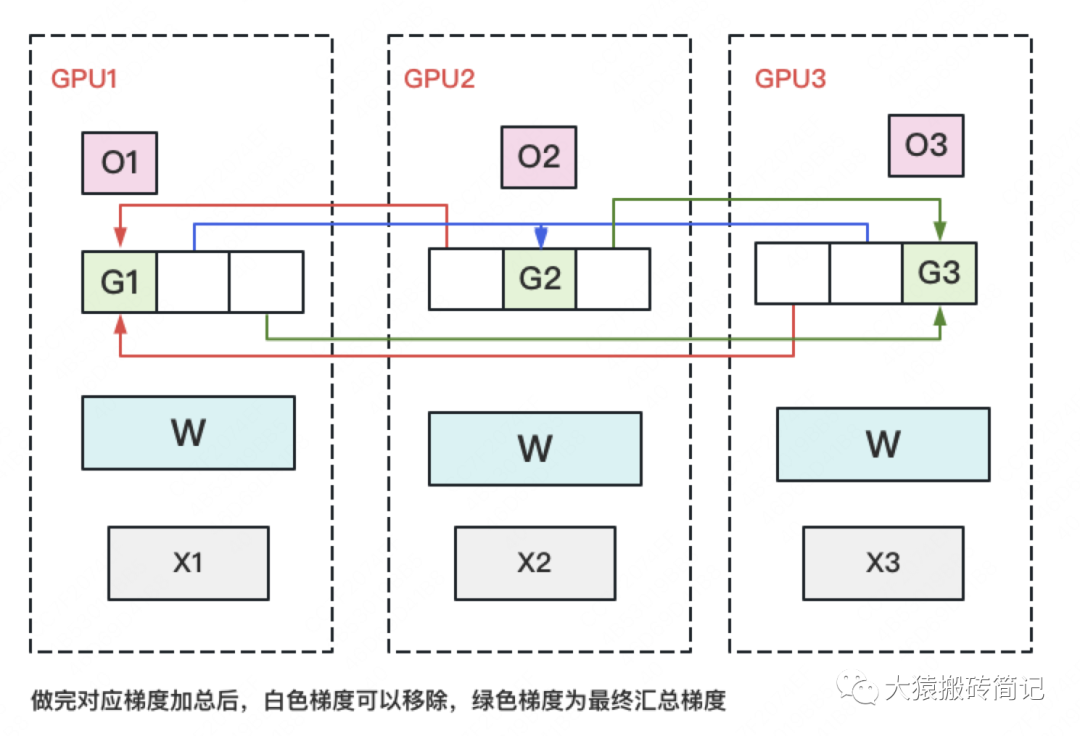
(1)每塊GPU上存一份完整的參數W。將一個batch的數據分成3份,每塊GPU各吃一份,做完一輪foward和backward后,算得一份完整的梯度(下圖中綠色+白色)。
(2)對梯度做一次Reduce-Scatter,保證每個GPU上所維持的那塊梯度是聚合梯度。例如對GPU1,它負責維護G1,因此其他的GPU只需要把G1對應位置的梯度發給GPU1做加總就可。匯總完畢后,白色塊對GPU無用,可以從顯存中移除。單卡通訊量。(1)和(2)見下圖:
(3)每塊GPU用自己對應的O和G去更新相應的W。更新完畢后,每塊GPU維持了一塊更新完畢的W。同理,對W做一次All-Gather,將別的GPU算好的W同步到自己這來。單卡通訊量。
再次比對下顯存和通訊量:

和樸素DP相比,存儲降了8倍,單卡通訊量持平,好像更牛皮了呢!那么,還可以優化嗎?
2.3
看到這里,也許你有點感覺了,ZeRO的思想就是:萬物皆可切,萬物皆可拋。所以現在,我們把參數也切開。每塊GPU置維持對應的optimizer states,gradients和parameters(即W)。
數據并行的流程如下:
(1)每塊GPU上存一份完整的參數W。將一個batch的數據分成3份,每塊GPU各吃一份。
(2)做forward時,對W做一次All-Gather,取回分布在別的GPU上的W,得到一份完整的W,單卡通訊量。forward做完,立刻把不是自己維護的W拋棄。
(3)做backward時,對W做一次All-Gather,取回完整的W,單卡通訊量。backward做完,立刻把不是自己維護的W拋棄。
(4)做完backward,算得一份完整的梯度G,對G做一次Reduce-Scatter,從別的GPU上聚合自己維護的那部分梯度,單卡通訊量。聚合操作結束后,立刻把不是自己維護的G拋棄。
(5)用自己維護的O和G,更新W。由于只維護部分W,因此無需再對W做任何AllReduce操作。
顯存和通訊量如下:
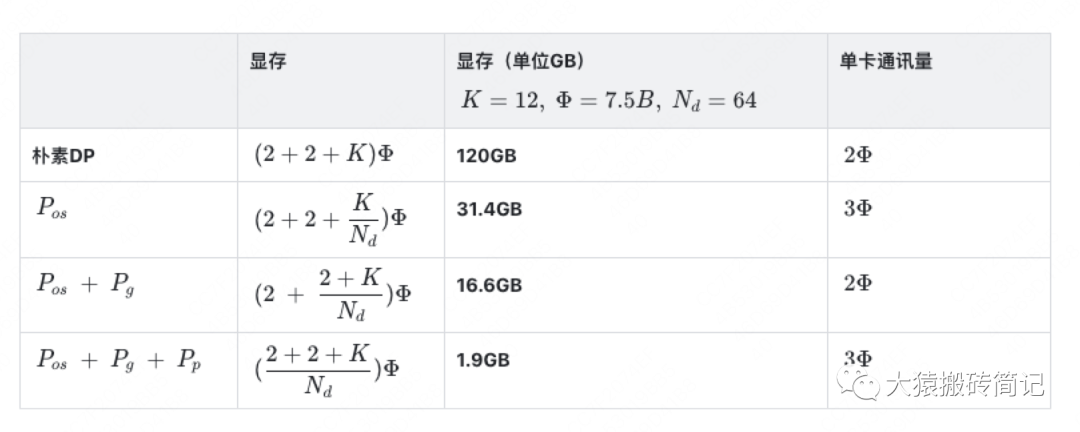
到這一步,我們用1.5倍的通訊開銷,換回近120倍的顯存。只要梯度計算和異步更新做的好,通訊時間大部分可以被計算時間隱藏,因此這樣的額外通訊開銷,也是劃算的。
到這里,我們可以放出原始論文中的說明圖了,經過以上分析,這張說明圖是不是瞬間就能看懂了。不得不吐槽下,雖然ZeRO的設計不復雜,但對應論文寫得真是邏輯跳躍,晦澀難懂...
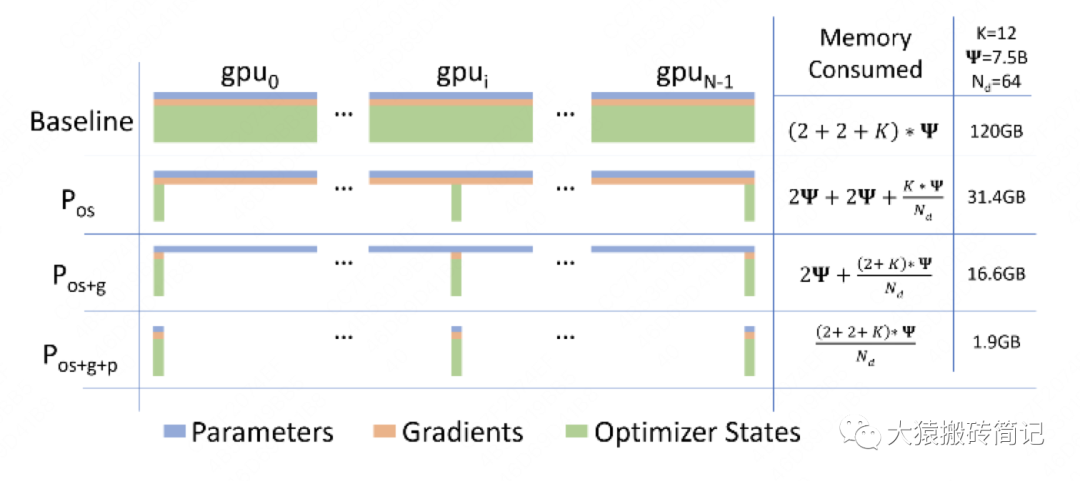
仔細一想,ZeRO其實掌握了降本增效的精髓:用完即棄,需要再補。反正我補一個和你差不多的,也不會花費很多通(找)訊(人)時間,還大大降低了我的成本。模型的每一層多算(造)幾(輪)遍(子)有啥關系呢,反正在我的預算里每個人都一刻不停地干活,就行啦!
2.4 ZeRO VS 模型并行
知道模型并行的朋友,可能會想,既然ZeRO都把參數W給切了,那它應該是個模型并行呀?為什么要歸到數據并行里呢?
其實ZeRO是模型并行的形式,數據并行的實質。
模型并行,是指在forward和backward的過程中,我只需要用自己維護的那塊W來計算就行。即同樣的輸入X,每塊GPU上各算模型的一部分,最后通過某些方式聚合結果。
但對ZeRO來說,它做forward和backward的時候,是需要把各GPU上維護的W聚合起來的,即本質上還是用完整的W進行計算。它是不同的輸入X,完整的參數W,最終再做聚合。
因為下一篇要寫模型并行Megatron-LM,因此現在這里羅列一下兩者的對比。
三、ZeRO-R
說完了以上對model states的顯存優化,現在來看對residual states的優化。
3.1 : Partitioned Activation Checkpointing
前面說過,對activation的存儲是靈活的。不像optimizer states,gradients和parameters對模型更新是必須的,activation只是起到加速梯度計算的作用。因此,在哪幾層保存activation,保存哪些activation都是可以靈活設置的。同樣,我們也可以仿照以上切割方式,每塊GPU上只維護部分的activation,需要時再從別的地方聚合過來就行。需要注意的是,activation對顯存的占用一般會遠高于模型本身,通訊量也是巨大的,所以這塊要靈活、有效地實驗設計。
3.2 : Constant Size Buffer
固定大小的內存buffer,它的目的在于:
提升帶寬利用率。當GPU數量上升,GPU間的通訊次數也上升,每次的通訊量可能下降(但總通訊量不會變)。數據切片小了,就不能很好利用帶寬了。所以這個buffer起到了積攢數據的作用:等數據積攢到一定大小,再進行通訊。
使得存儲大小可控。在每次通訊前,積攢的存儲大小是常量,是已知可控的。更方便使用者對訓練中的存儲消耗和通訊時間進行預估。
3.3 : Memory Defragmentation
在前文提過,設置機制,對碎片化的存儲空間進行重新整合,整出連續的存儲空間。防止出現總存儲足夠,但連續存儲不夠而引起的存儲請求fail。
四、ZeRO-Offload與ZeRO-Infinity
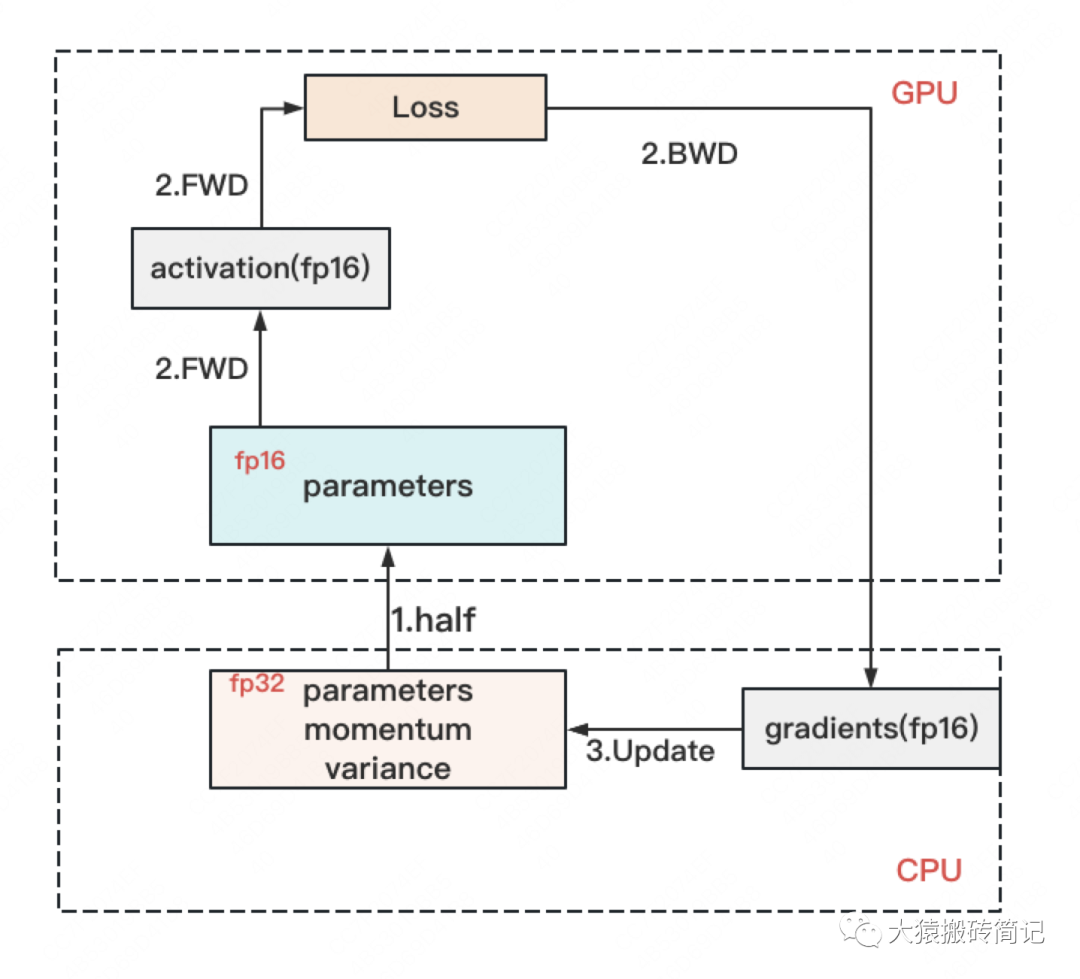
最后,簡單介紹一下ZeRO-Offload。它的核心思想是:顯存不夠,內存來湊。如果我把要存儲的大頭卸載(offload)到GPU上,而把計算部分放到GPU上,這樣比起跨機,是不是能既降顯存,也能減少一些通訊壓力呢?
ZeRO-Offload的做法是:
forward和backward計算量高,因此和它們相關的部分,例如參數W(fp16),activation,就全放入GPU。
update的部分計算量低,因此和它相關的部分,全部放入CPU中。例如W(fp32),optimizer states(fp32)和gradients(fp16)等。
具體切分如下圖:
ZeRO-infinity也是同理,它們在解決的事情都是:找個除GPU之外的地方,存數據。感興趣的朋友可以深入研究,這里就不展開了。
-
gpu
+關注
關注
28文章
4702瀏覽量
128710 -
Server
+關注
關注
0文章
90瀏覽量
24005 -
顯存
+關注
關注
0文章
108瀏覽量
13649
原文標題:圖解大模型訓練之:數據并行下篇(ZeRO,零冗余優化)
文章出處:【微信號:GiantPandaCV,微信公眾號:GiantPandaCV】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
電源適配器EMI確實和開關頻率不成線性關系
做線性比較好的電流檢測模塊
LAVVIEW中怎么把采集的信號換算成想要的格式,如采集的0-5V的電壓 線性關系 轉換側對應顯示0-100數值
用ACS712設計電路,電流過大,不能呈線性關系
如何利用線性電壓產生非線性占空比PWM輸出
線性關系、線性區
單電源供電4~20ma轉0~3.3V呈線性關系圖表
光學相位詢問技術介紹及傳感解決方案如何與聚合物光纖一起使用






 工商網監
工商網監
評論