 如何學習相機模型與標定?
如何學習相機模型與標定?
相機標定可以說是計算機視覺方向的基石。我們常見的許多計算機視覺任務,比如圖像畸變校正,三維重建和立體視覺,獲取相機參數,是這些工作繞不開的第一步。如何準確有效的獲取相機參數就變得尤為重要,相機參數的準確性會嚴重影響到后續工作的進展。也正因此,相機標定幾乎是計算機視覺崗位面試的標配。
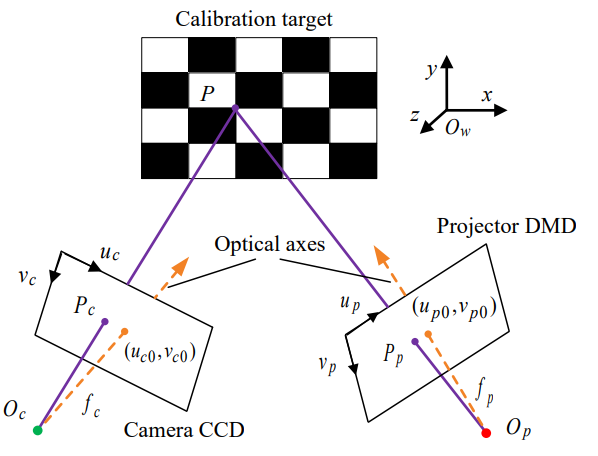
相機標定是通過輸入帶有標定patter的標定板來獲得相機參數的一個過程。實際的光學成像是一套非常復雜的過程,從三維世界投影到相機中的二維圖像。相機標定就是用抽象的數學模型來表示這個復雜的成像過程。從每年頂會發表論文的方向來看,3D視覺占得比重越來越大,如何從三維世界中獲取有效信息,以及構建三維世界變得尤為重要。立體視覺,結構光,ToF是目前業內最常用,也是性能最好的三種方法。3D相機幾乎已經是手機的標配,刷臉支付也已經完全滲透進入我們的生活中。

如何快速從入門到精通
然而相機標定雖然基礎,但是知識點比較凌亂,而且具體的數學推導比較復雜,對于學習者的數學能力要求比較高。目前網上幾乎沒有,系統講解多種相機標定的課程還比較少,尤其是詳細的數學推導。很多同學能夠實現簡單的相機標定demo,但是背后的數學推導以及trick并不清晰。在實際的產業應用中需要對一個算法足夠了解才可以。這也是3D視覺工坊推出這門課程的原因,通過這門課程,系統、完整的了解相機標定。
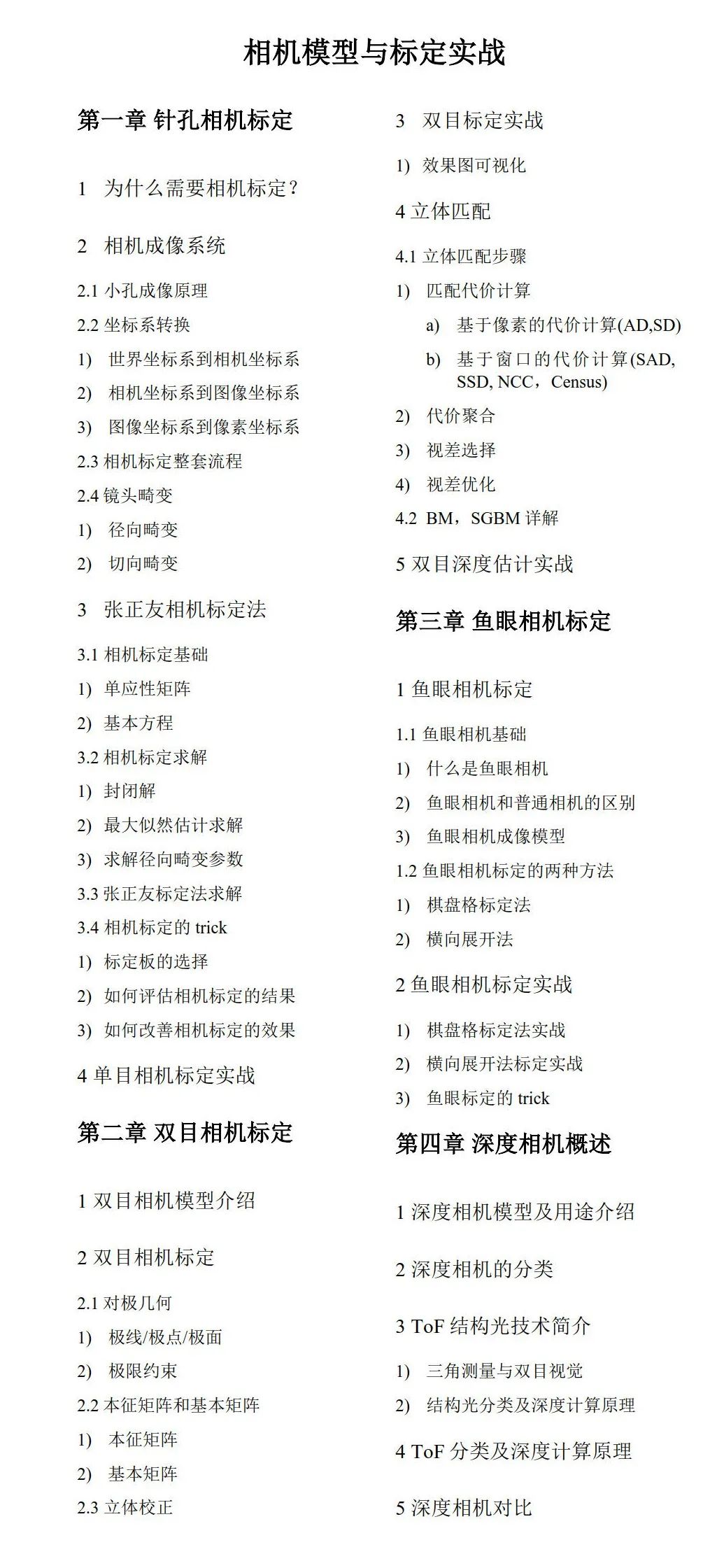
本課程主要包含兩部分,分別是相機標定和3D視覺,相機標定包含單目,雙目,以及魚眼相機標定,3D視覺包含立體視覺,結構光和ToF,以立體視覺為主,課程將提供所有教學數據和源碼。課程大綱如下所示:
講師介紹
韋恩,研究生畢業于國內某985,曾在小米、平安等多個公司擔任算法工程師,有豐富的計算機視覺算法工作經驗,入選創新工場舉辦的AIChallenger項目。
課程亮點
1.包含單目、雙目、魚眼多種相機標定,足夠詳細; 2.深入淺出,循序漸進,從簡單的小孔成像出發,到復雜的數學推導求解相機參數,理論推導詳細完整。 3.理論和實踐相結合,每一章都包含詳細的project,授課結束后,講師與同學們繼續進行問題答疑與交流。 4.真正的了解業內常見的關于相機標定的問題,實現從簡單的了解到工業落地的跨越。
學后收獲
1.對單目,雙目,魚眼相機標定的理論推導有深入的理解,掌握相機標定的流程與常見問題的解決辦法; 2.熟悉3D視覺獲取深度的常見方法,包括立體視覺,結構光,ToF; 3.從極線約束到立體匹配,再到深度計算,掌握立體視覺求解深度的完整流程;
審核編輯 :李倩
-
相機
+關注
關注
4文章
1343瀏覽量
53502 -
模型
+關注
關注
1文章
3171瀏覽量
48711 -
計算機視覺
+關注
關注
8文章
1696瀏覽量
45927
原文標題:如何學習相機模型與標定?(代碼+實戰)
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦


opencv相機標定原理與步驟

相機標定的邏輯和學習資料詳細概述

HALCON的3D相機標定


基于除法畸變模型的鏡頭線性標定方法
相機標定含義(解決什么是相機標定)
相機標定為什么能夠達到小于0.01像素誤差的精度?
基于圓形標定點的相機幾何參數的標定
相機標定究竟在標定什么?






 工商網監
工商網監
評論