") 恒矩電機(jī)調(diào)速電路分享
恒矩電機(jī)調(diào)速電路分享
本文解釋了直流電機(jī)控制器,該控制器具有恒定的扭矩補(bǔ)償功能,使電機(jī)能夠以一致的速度運行,而不管其負(fù)載如何。
普通速度控制器的缺點
大多數(shù)簡單速度控制器的一個缺點是它們只為電機(jī)提供預(yù)定的恒定電壓。因此,由于沒有扭矩補(bǔ)償,速度不會保持恒定,并且會隨著電機(jī)上的負(fù)載而變化。
例如,在模型火車中,使用簡單的控制器,火車的速度隨著爬坡度逐漸降低,并在下坡時加速。
因此,對于模型列車,為保持所選電機(jī)速度而進(jìn)行的電位控制調(diào)整同樣會根據(jù)發(fā)動機(jī)可能牽引的負(fù)載而偏離。
本文中介紹的恒矩電機(jī)速度控制器電路通過跟蹤電機(jī)速度并在預(yù)定控制設(shè)置下保持恒定來擺脫此問題,無論電機(jī)上的負(fù)載如何。
該電路可應(yīng)用于大多數(shù)使用直流永磁電機(jī)的型號。
計算反電動勢系數(shù)
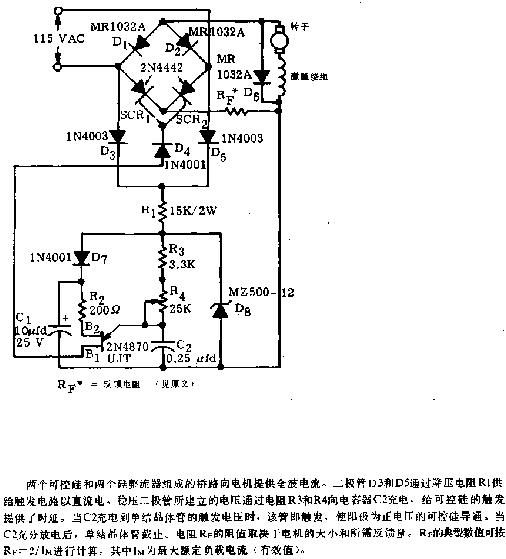
電機(jī)端子兩端的電壓由幾個因素組成,即電機(jī)產(chǎn)生的背部e.m.f.和電樞電阻兩端的電壓降。
電機(jī)繞組產(chǎn)生的反電動勢通常與電機(jī)速度成正比,這意味著可以通過測量反電動勢含量來監(jiān)控電機(jī)速度。但是,主要問題是將反e.m.f.與電樞電阻電壓隔離和檢測。
假設(shè)一個單獨的電阻器與電機(jī)串聯(lián),那么考慮到一個公共的單個電流通過該電阻器并穿過電樞電阻,兩個串聯(lián)電阻兩端的壓降很可能等同于電樞電阻兩端的壓降。
實際上,可以假設(shè)當(dāng)這兩個電阻值相同時,每個電阻上的兩個電壓幅度也將相似。有了這些數(shù)據(jù),就可以從電機(jī)電壓中扣除R3的壓降,并獲得處理所需的e.m.f值。

加工反電動勢以實現(xiàn)恒定扭矩
所提出的電路持續(xù)監(jiān)控后部e.m.f.并相應(yīng)地調(diào)節(jié)電機(jī)電流,以確保在指定的電位器控制設(shè)置下,后背e.m.f.以及電機(jī)速度保持在恒定扭矩。
為了使電路描述更容易,認(rèn)為P2被調(diào)整并保持在其中心位置,并且電阻R3被選擇為等效于電機(jī)電樞的電阻值。
計算電機(jī)電壓
電機(jī)電壓可以通過添加背面e.m.f來計算。Va隨著電壓下降在電機(jī)兩端的內(nèi)阻Vr。
考慮到R3降低電壓Vr,輸出電壓Vo將等于Va + 2 V。
IC1反相輸入(-)處的電壓為Va + Vr,同相輸入(+)處的電壓為:
Vi + (Va + 2Vr - Vi) / 2
由于上述兩個電壓幅度應(yīng)該相等,因此我們將上述等式組織為:
Va + Vr = Vi + (Va + 2Vr - Vi) / 2
簡化此等式得到 Va = Vi。
上式表明,電機(jī)的背面e.m.f.始終保持在與控制電壓相同的水平。這允許電機(jī)在P1速度調(diào)節(jié)的任何指定設(shè)置下以恒定的速度和扭矩工作。
包括P2以補(bǔ)償R3電阻和電樞電阻之間可能存在的差異水平。它通過調(diào)整同相輸入運算放大器上的正反饋幅度來實現(xiàn)這一點。
運算放大器LM3140基本上將電機(jī)電樞兩端產(chǎn)生的電壓與電機(jī)兩端的反電動勢等效電壓進(jìn)行比較,并調(diào)節(jié)T1 2N3055的基極電位。
配置為發(fā)射極跟隨器的T1根據(jù)其基本電位調(diào)節(jié)電機(jī)的速度。當(dāng)運算放大器檢測到更高的反電動勢時,它會增加電機(jī)兩端的電壓,從而導(dǎo)致電機(jī)速度增加,反之亦然。
T1 應(yīng)安裝在合適的散熱器上才能正常工作。
如何設(shè)置電路
恒轉(zhuǎn)矩電機(jī)速度控制器電路的設(shè)置是通過用變化負(fù)載的電機(jī)調(diào)整P2來完成的,直到電機(jī)達(dá)到恒定轉(zhuǎn)矩,而不管負(fù)載條件如何。
當(dāng)電路應(yīng)用于模型列車時,必須注意不要將P2轉(zhuǎn)向P1太多,這可能導(dǎo)致模型列車減速,相反,P2不得向相反方向轉(zhuǎn)彎太多,這可能會導(dǎo)致列車速度在爬上坡時實際上變快。
-
直流電機(jī)
+關(guān)注
關(guān)注
36文章
1708瀏覽量
70088 -
調(diào)速電路
+關(guān)注
關(guān)注
2文章
19瀏覽量
11301 -
直流電機(jī)控制器
+關(guān)注
關(guān)注
0文章
9瀏覽量
3635
發(fā)布評論請先 登錄
相關(guān)推薦
pwm風(fēng)扇轉(zhuǎn)速怎么調(diào)節(jié) 風(fēng)扇電機(jī)調(diào)速電路的PWM波形
恒轉(zhuǎn)矩調(diào)速方式和恒功率調(diào)速方式
恒功恒速的調(diào)速器
步進(jìn)電機(jī)矩頻特性測試系統(tǒng)設(shè)計
簡易電機(jī)調(diào)速電路分析
伺服電機(jī)如何調(diào)速?
調(diào)速電機(jī)怎么調(diào)速_調(diào)速電機(jī)的調(diào)速范圍
變頻電機(jī)怎么調(diào)速_變頻電機(jī)的調(diào)速范圍
調(diào)速電機(jī)怎么調(diào)速 調(diào)速電機(jī)的五根調(diào)速線如何接
電磁調(diào)速異步電機(jī)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論