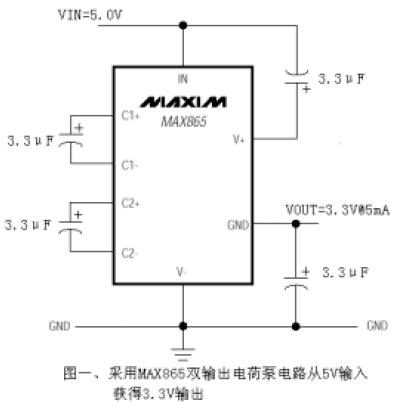
 VFD電網/陽極電源,采用MAX6850-MAX6853泵輸出
VFD電網/陽極電源,采用MAX6850-MAX6853泵輸出
本文介紹如何使用MAX6850、MAX6851、MAX6852或MAX6853真空熒光顯示控制器的PUMP時鐘輸出來構建低成本升壓轉換器。DC-DC轉換器從MAX3-3顯示控制器使用的6850.3V電源為VFD管產生高壓電網電源陽極電源。
本應用筆記討論如何使用MAX6850、MAX6851、MAX6852和MAX6853真空熒光顯示(VFD)控制器的PUMP時鐘輸出來構建成本最小的升壓轉換器,以方便的較低電壓產生高壓電網/陽極驅動器電源。
PUMP輸出是MAX6850–MAX6853 VFD控制器的五個通用邏輯輸出之一。所有這些邏輯輸出都具有額外的特殊功能;在PUMP的情況下,輸出可以配置為標稱值為80kHz時鐘輸出。PUMP時鐘頻率實際上是OSC/50,其中OSC是使用MAX6850–MAX6853 OSC1和OSC2引腳設置的多路復用時鐘頻率。OSC 可以使用內部 RC 振蕩器設置,也可以使用外部時鐘。無論哪種方式,允許的范圍都是2MHz至8MHz。標稱 OSC 頻率為 4MHz,將泵浦頻率設置為 80kHz。
這里討論的轉換器拓撲是具有固定導通時間和“砰”調節的不連續升壓。該電路的工作原理是,當泵為高電平時,在每個泵時鐘的前半周期內通過電感L1增加電流,并在泵的后半周期(當泵為低電平時)將存儲的能量傾倒到輸出電容C2中(圖1和圖2)。
圖1.使用泵輸出作為升壓開關驅動器。
圖1.文本ssss。
在沒有任何反饋的情況下,圖2所示基本升壓電路的輸出電壓將隨輸入電壓和負載而變化。當輸出空載時,輸出電壓將隨著每個電源周期而不斷上升,因為電感存儲的能量總是被傾倒到輸出電容器中。一種簡單的調節技術可以檢測到輸出是否高于所需電壓。然后防止進一步的電源循環,直到由輸出電容保持的轉換器輸出電壓下降。這通常稱為砰砰聲調節,涉及對轉換時鐘(在本例中為PUMP)進行選通,以便僅在輸出超出穩壓時允許轉換周期。
圖3顯示了帶反饋的低成本升壓轉換器的實現方案。要了解電路操作,首先要考慮PUMP上升時循環的開始。假設目前電路處于失調狀態,Q2處于關斷狀態。當PUMP上升時,Q1作為開關導通,電流開始通過L1上升。半個泵時鐘周期后,泵下降,Q1關閉。同時,L1電流上升到值I惠普,該電流現在通過二極管D1流入輸出電容C2和存在的任何負載。如果輸出電壓足夠高,可以打開齊納二極管D2,則電流將流過D2和R2。當輸出電壓上升到該閾值以上時,最終Q2將導通,箝位Q1的基極發射極,防止Q1在PUMP下一個高電平時導通。否則,R3確保Q2保持關閉狀態,Q1再次開啟,轉換重復。C4為檢測提供小延遲,以減少Q2打開和關閉以保持調節時的顫振。
圖3.一個晶體管反饋控制。
圖3所示的簡單電路可以通過在輸出電壓檢測中增加遲滯來改進。遲滯確保Q2始終難以打開或關閉。如果沒有遲滯,Q2可以在調節門限處部分導通,從而從Q1釋放部分基極電流。當這種情況發生時,Q1可能不會那么嚴重飽和,從而降低效率。遲滯可以通過增加一個雙晶體管施密特觸發器來實現,如圖4所示。施密特觸發器使檢測閾值增加了約0.25V遲滯。Q4集電極的施密特觸發器輸出在3.3V和0.9V之間切換,因此需要D3和R7來確保Q2關斷。
圖4.施密特跳跳虎反饋控制。
為電源路徑選擇組件值的一種簡單方法是使用電源。轉換器必須能夠傳輸足夠的功率,以將輸出電壓保持在輸出負載電流(從最小輸入電源電壓)。讓我們定義一些參數:
VIN(最小值) = 最小輸入電源電壓
VSW = Q1開關晶體管兩端的壓降
VIN(最大值) = 最大輸入電源電壓
PIN = 額定輸出負載下的輸入電源功率
IIN(平均) = 輸入平均電流
VOUT = 輸出電源電壓
IOUT = 輸出最大負載電流
POUT = 輸出最大負載功率
VRIPPLE = 由于電感器將其功率傾倒到輸出電容器中的輸出電源電壓紋波
VDROOP = 輸出電源電壓因負載而下降,從輸出電容器吸收電流
Eff = 預期功率轉換效率(僅電源路徑—不包括Q1基極電流)
L = L1 的電感
Ipk = 峰值電感電流
f泵 = 泵頻率
tON = 轉換器電源開關導通時間
現在我們推導出這個架構的一些方程(最終方程以粗體顯示):
噘嘴 = VOUT × IOUT
由于泵占空比為 50:50
tON = 1/(2 × fPUMP)
輸出功率來自存儲在電感器中的能量
嘴 = 0.5 × L × (Ipk)2 × fPUMP
由于電感電流在 fPUMP 周期的一半內從 0 斜坡上升到 Ipk
IIN(平均) = ipk/4
輸入和輸出功率的公式:
噘嘴 = 有效 × PIN
噘嘴 = VOUT × IOUT
PIN = VIN × IIN(平均)
這給了我們 Ipk 的等式:
Ipk = (VOUT × IOUT × 4)/(Eff × VIN(min))
根據 Ipk,我們可以計算出 L 的最大值:
L(最大值) = (VIN(最小值) - VSW) × tON/Ipk
包括等式 04 給我們
L(最大值) = (VIN(最小值) - VSW)/(2 × fPUMP × Ipk)
L的選擇值為我們提供了最大輸入電源電壓下Ipk的最大值。L1、Q1 和 D1 的額定值必須針對以下峰值電流:
Ipk(max) = (VIN(max) - VSW)/(2 × fPUMP × L)
我們還需要考慮電容C2兩端的輸出紋波電壓。紋波電壓的估計值是通過假設所有電感能量都傾倒到C2中獲得的。
1/2 × C2 × (VOUT + 電壓紋波)2 = (1/2 × C2 × VOUT2) + 1/2 × L1 × Ipk2
這簡化為:
電壓紋波 = (VOUT2 + (Ipk2 × L1/C2))1/2 - VOUT
電容C2兩端的電壓也會因負載而下降。通過假設輸出電壓在fPUMP的整個周期內從VOUT衰減,然后再次恢復到VOUT,可以估算壓降電壓。從 Q = C × V = I × t,我們得到:
VDROOP = IOUT/C2/fPUMP
對于一個工作示例,考慮由3.3V ±0.3V輸入電源產生的28V/15mA的要求。從公式08:
Ipk = (28 × 0.015 × 4)/(0.8 × 3),估計功率轉換效率為 80%
所以:
Ipk = 0.7A
從公式 10:
L(最大值) = (3 - 0.3)/(2 × 80000 × 0.7),使用估計的 300mV Q1 晶體管飽和電壓
所以:
長(最大值) = 24.1μH
我們選擇 L = 22μH
從公式 11:
Ipk(max) = (3.6 - 0.3)/(2 × 80000 × 22 × 10-6)
所以:
Ipk = 0.94A
L1、Q1 和 D1 的額定峰值電流必須為 0.94A。
我們選擇 Zetex FZT851 NPN 晶體管作為 Q1。該晶體管在IC = 1A時的最大過溫VCE(sat)數字為300mV,證實了我們對VSW的估計。1A 集電極電流時的 hFE 最小值為 100。假設MAX6850–MAX6853 VFD控制器工作在3.3V ±10%,我們需要0.94/70 = 13.4mA的基極電流,其中70是hFE的設計值,以確保飽和。在此13.4mA負載下,PUMP輸出上升至200mV(根據MAX6850–MAX6853數據資料中VOL與ISINK的典型工作特性)。現在,我們可以計算R1 = (3.0 - 0.9 - 0.2)/0.0134 = 130Ω的值,其中0.9是FZT851在這些工作條件下的VBE(sat)。
可以使用邏輯電平NMOS FET代替NPN晶體管。但是,很難獲得VDS額定值為30V或更高的3V邏輯電平功率FET。
現在我們考慮輸出電容C2:
從公式 13:
VRIPPLE = (282 + (0.942 × 22/4.7))1/2 - 28,C2的試驗值為4.7μF。
紋波 = 36mV
從公式 14:
VDROOP = 0.015/(4.7 × 10-6)/80000,再次使用 C2 的試驗值 4.7μF。
電壓 = 40mV
紋波和噪聲的組合小于100mV。這小于250mV施密特遲滯,因此可以接受。
圖5.圖4所示電路的調節和效率曲線。
-
轉換器
+關注
關注
27文章
8639瀏覽量
146897 -
控制器
+關注
關注
112文章
16214瀏覽量
177483 -
DC-DC
+關注
關注
30文章
1931瀏覽量
81500
發布評論請先 登錄
相關推薦
MAX5977/MAX5977a/MAX5977B,pdf
max232的電源升壓泵到10V能夠作為l298n的電源輸入嗎
基于MAX232的正負電源設計
用于LCD監測器TV供電的低成本多輸出電源MAX8728資料推薦
什么是MAX3232 IC?如何使用?
VFD Grid/Anode Supply Using MA






 工商網監
工商網監
評論