") VPS、GPS與SLAM的區(qū)別與聯(lián)系
VPS、GPS與SLAM的區(qū)別與聯(lián)系
首先簡單的闡述一下三者的定義:
VPS全稱為Visual Positioning System,即視覺定位系統(tǒng)。手機(jī)端(移動時代)的VPS首次出現(xiàn)時間節(jié)點為2019年,這一年Google 發(fā)布了其產(chǎn)品“Google Maps AR(測試版)”,該產(chǎn)品使用 VPS(視覺定位服務(wù))技術(shù)通過相機(jī)圖像在戶外可以實現(xiàn)任意視角的定位與定向
提到GPS(global positioning system)則是大家耳熟眾詳?shù)娜侄ㄎ幌到y(tǒng),GPS是一種用于確定地理位置和導(dǎo)航的技術(shù),它由一組衛(wèi)星、地面控制站和接收設(shè)備組成。GPS最初由美國國防部開發(fā),于1978年正式投入使用。該技術(shù)的目的是提供一種全球性的導(dǎo)航系統(tǒng),為軍事和民用用戶提供高精度的定位服務(wù)。
關(guān)于SLAM(Simultaneous Localization and Mapping),即實時定位與構(gòu)圖技術(shù)。SLAM技術(shù)出現(xiàn)的時間節(jié)點很早,其歷史可以追溯到20世紀(jì)80年代。早期的SLAM方法主要基于濾波器,后來隨著技術(shù)不斷發(fā)展和改進(jìn),在算法框架方面,出現(xiàn)了基于因子圖的優(yōu)化方法,如圖優(yōu)化(Graph Optimization)和基于最大似然估計的非線性優(yōu)化等。而國內(nèi)SLAM技術(shù)大火 的時間節(jié)點大概為2016年左右,自動駕駛行業(yè)的興起把SLAM推向了一個新的高度。
而三者的聯(lián)系與區(qū)別如下:
(1)三個技術(shù) 都可以實現(xiàn)定位的功能
(2) VPS 和SLAM 是提供6DOF 信息,而GPS 只能提供3DOF信息
(3) VPS 相對于SLAM 和GPS而言是離散數(shù)值,VPS因為計算的復(fù)雜度無法實現(xiàn)實時的輸出
對于SLAM和VPS,在我看來這兩種技術(shù)往往是相互糾纏、相互成就的關(guān)系。首先SLAM依然是一種相對定位技術(shù),如果長時間的跟蹤,則難免會出現(xiàn)drift問題。而VPS 這種offline+online 形式一方面可以提供準(zhǔn)確的地理位置和姿態(tài)信息,另一方面可以當(dāng)作“錨點”與SLAM系統(tǒng)耦合起來(離散的軌跡+連續(xù)的軌跡)得到更魯棒的任意視角的位姿信息。
除此之外,盡管 SLAM 算法到目前為止已經(jīng)是非常流行的技術(shù),特別是與慣性單元的融合,但其不能獲得手機(jī)的地理定位,地理位置是指設(shè)備相對于地面參考標(biāo)記(例如緯度、經(jīng)度、高度、四元數(shù)……)的位置和方向。換句話說,SLAM技術(shù)雖然回答了“where am I?”的問題,但是其不能回答我是在“哪個地方的哪”,聽起來是有點繞口,舉個簡單的例子:SLAM技術(shù)告訴我當(dāng)前位置處于一個車庫下面,但是并不能提供是北京的車庫還是上海的車庫,而VPS 解決了這一個問題。
VPS 如何工作
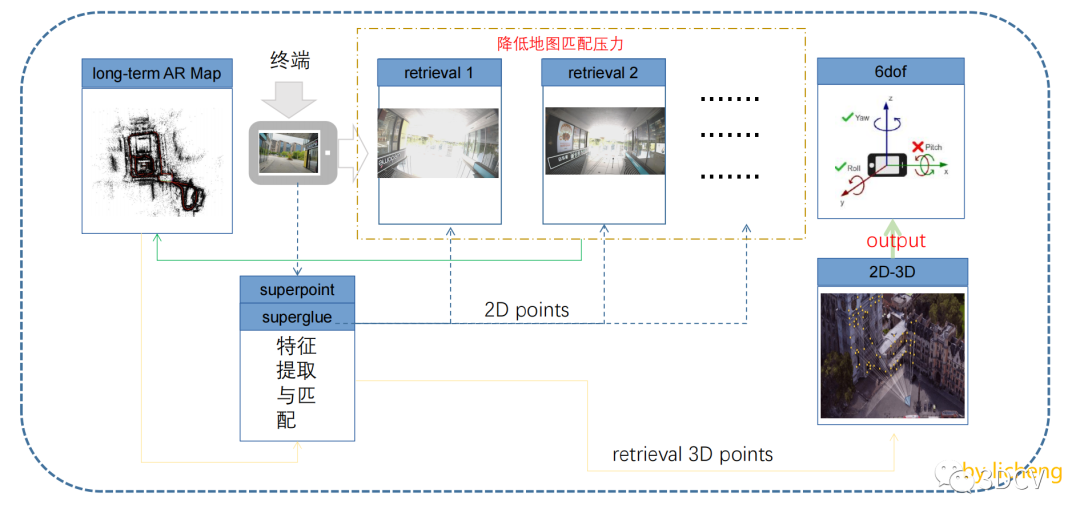
VPS 作為AR 領(lǐng)域或者空間計算中最為核心的技術(shù),其工作原理分為兩個部分-offline + online ,即是離線建圖和在線定位,VPS 與SLAM結(jié)合的技術(shù)-AR pipeline 如下所示:
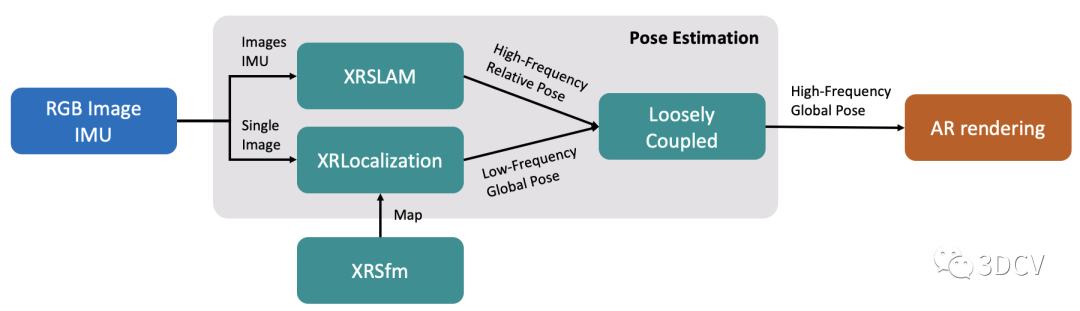
注:該圖來自于商湯openxrlab
(1) 離線建圖
計算機(jī)視覺中三維重建問題的兩種主要方法是SfM(運動結(jié)構(gòu))和SLAM。這兩種方法在算法上相似,但它們的應(yīng)用領(lǐng)域通常有所不同。SLAM最初是為了實時操作并使用攝像機(jī)的視頻流而設(shè)計的。相反,SfM類型的算法使用在不同距離和視角下獲取的圖像,然后進(jìn)行后處理進(jìn)行重建。所以在建圖層面不同參與者不一定需要相同的流程來構(gòu)建他們的地圖,他們需要根據(jù)自己的傳感器類型、拍攝方式等來選擇不同的算法方案。
例如,Google在其服務(wù)器上的Google Street View產(chǎn)品中已經(jīng)有了來自數(shù)據(jù)庫的360度照片,他們的設(shè)備如下圖。這些照片具有兩個特點:
(i)它們是由放置在汽車車頂上的攝像頭獲取的
(ii)它們使用GNSS進(jìn)行了地理定位。這就是為什么Google可能使用了SfM類型的算法來構(gòu)建其點云的原因。使用SLAM方法會得到糟糕的結(jié)果,因為這些圖像在距離和角度上存在明顯差異。???????????
除此之外,還有被自動駕駛公司Lyft收購的 Blue Vision Labs ,他們的地圖也是通過SfM技術(shù)實現(xiàn),他們是使用開源的三維重建框架-openMVG得到大場景地圖(當(dāng)然你也可以選擇使用COLMAP去構(gòu)建離地圖),
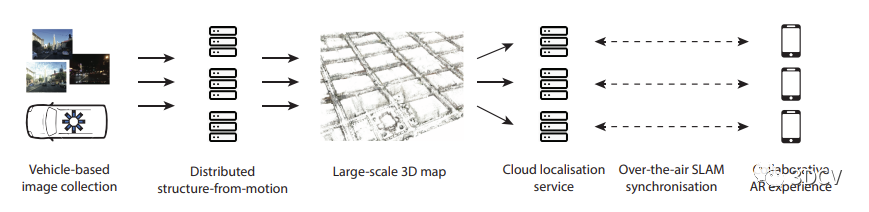
相反的是,在游戲開發(fā)公司Niantic,盡管與Google有密切的聯(lián)系,但是玩家直接使用智能手機(jī)進(jìn)行獲取視頻圖像,所以在這種情況下,用于重建點云的算法更傾向于SLAM類型的算法。
(2) 在線定位
首先,用戶使用智能手機(jī)攝像頭瀏覽周圍的環(huán)境,從視頻中提取出一張(或多張)圖像,然后將圖像發(fā)送到云端,與離線構(gòu)建的地圖中的圖像進(jìn)行檢索、特征提取、特征匹配后得到當(dāng)前圖像與3D地圖中三維點的關(guān)聯(lián)關(guān)系,最后通過PnP算法恢復(fù)當(dāng)前的位置與姿態(tài)信息,整個pipeline 如下:
VPS 的商業(yè)應(yīng)用
VPS/AR 有諸多商業(yè)應(yīng)用,如營銷和廣告、零售和電子商務(wù)、實時導(dǎo)航和位置服務(wù)、培訓(xùn)和教育、工業(yè)和制造、游戲和娛樂等等,這里我們選擇最基礎(chǔ)也是最實用的應(yīng)用-導(dǎo)航來簡單闡述,提到導(dǎo)航我們都知道高德地圖、百度地圖等都具備很智能的GPS導(dǎo)航功能。但是當(dāng)我們使用這些APP時,有多少次問自己:“我是否朝著正確的方向前進(jìn)?”,此外對于不少人而言,其實他們根本看不懂地圖,更不要說去辨別二維地圖上光標(biāo)箭頭的朝向信息是否正確,而使用視覺定位系統(tǒng)(VPS),可以在地圖上疊加箭頭,使導(dǎo)航變得輕而易舉。
VPS 的挑戰(zhàn)
VPS 技術(shù)目前位置仍然存在很多問題與挑戰(zhàn),從兩個方面進(jìn)行闡述:
(1) 建圖層面:地圖的更新、 地圖的存儲等
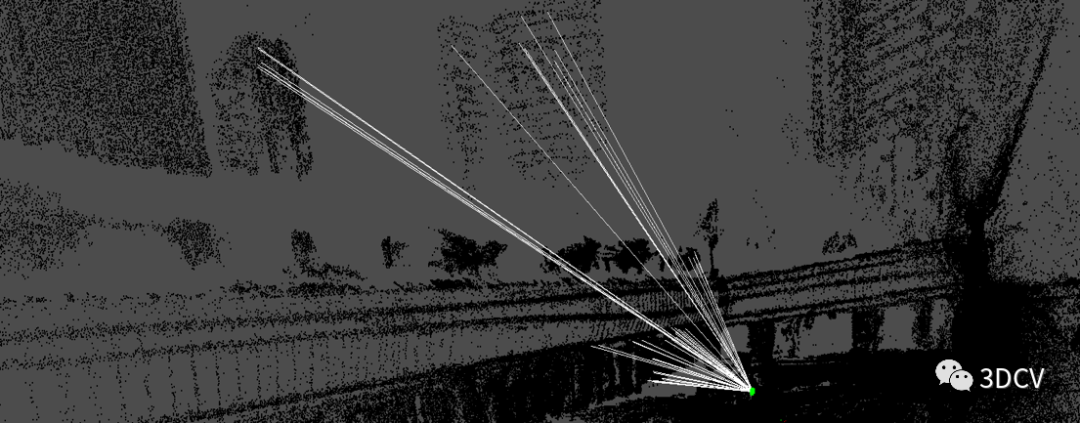
(2) 定位層面:重復(fù)結(jié)構(gòu)、低紋理如下圖所示
展望
空間即入口,入口即計算。談到AR,我們往往會想起slam技術(shù),而會忽略里面最重要的VPS技術(shù),我堅信在未來VPS將會成為通用的定位系統(tǒng),借用最近WWDC 2023 Apple Vision Pro 發(fā)布會上的一句話“The era of spatial computing is here”。
審核編輯:劉清
-
傳感器
+關(guān)注
關(guān)注
2548文章
50740瀏覽量
752146 -
濾波器
+關(guān)注
關(guān)注
160文章
7749瀏覽量
177736 -
SLAM
+關(guān)注
關(guān)注
23文章
419瀏覽量
31789 -
vps
+關(guān)注
關(guān)注
1文章
107瀏覽量
12010 -
slam技術(shù)
+關(guān)注
關(guān)注
0文章
13瀏覽量
1580
原文標(biāo)題:VPS 和GPS 、SLAM 之間的愛恨情仇
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
VPS常見故障解決方法
VPS特點
激光SLAM與視覺SLAM有什么區(qū)別?
基于SLAM的移動機(jī)器人設(shè)計
GNSS和GPS這兩者有什么區(qū)別和聯(lián)系呢
GPS與GPRS的區(qū)別與聯(lián)系是什么
GPS與GPRS到底有什么區(qū)別與聯(lián)系
GPS與GPRS有什么區(qū)別







 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論