 KUKA8.3系統WorkVisual AddOnVKR控制心得
KUKA8.3系統WorkVisual AddOnVKR控制心得
虛擬外部軸高級版本
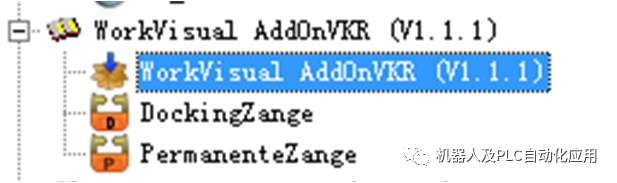
WorkVisualAddOnVKR 大眾公司專用版本軟件:
WorkVisualAddOnVKR是一個可后續加載的備選軟件包,用于配置焊鉗和線性滑軌。
WorkVisualAddOnVKR只賍用于通過軟件KUKA.WorkVisual配置焊鉗和線性滑軌。
在驅動裝置接口的輸入端和輸出端與現場總線設備映射時,必須注意以下幾點:
?僅支虛 PROFINET 或 Interbus類型的焊鉗,以進行自動映射。
?僅支虛 BOOL 或 BYTE 類型的分組,以進行映射。
?在 PLC配置窗口中(菜單序列 編輯器> 備選軟件包 >PLC 配置)映射模式 區段 必須是已進行了設置。
?輸入端:必須至少有 10 個字節連續映射。
?輸出端:在有 10 個字節連續映射時,字節 5 與字節 6 的映射必須隔開。
?輸出端:在有 10 個字節連續映射時,字節 5 與字節 6 的映射必須隔開。
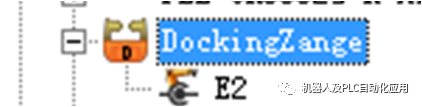
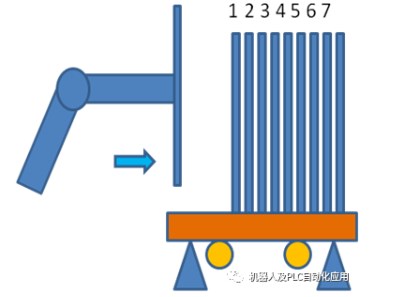
在配置時焊鉗與一個或多個驅動裝置接口連接。一個對接焊鉗最多可以與 7 個驅動裝置接口連接。一個固定焊鉗只能與一個驅動裝置接口連接。每個驅動裝置接口與一個現場總線設備連接。
操作步驟:
1.雙擊焊鉗。編輯器SynchroMove配置打開。
2.點擊焊鉗的連接點并按住鼠標鍵。
3.將鼠標指針拖到所需的驅動裝置接口上并松開鼠標鍵。焊鉗現在與驅動裝置接口連接。
審核編輯:湯梓紅
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
plc
+關注
關注
5008文章
13151瀏覽量
462088 -
接口
+關注
關注
33文章
8498瀏覽量
150837 -
大眾
+關注
關注
1文章
779瀏覽量
33997 -
KUKA
+關注
關注
3文章
217瀏覽量
16490
原文標題:KUKA8.3系統WorkVisual AddOnVKR控制心得
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
KUKA庫卡機器人伺服驅動器相關型號舉例
KUKA庫卡機器人伺服驅動器(Servo Drive)是KUKA運動控制的重要組成部分,被普遍應用于工業機器人及數控加工中心等自動化設備中。是用來控制伺服電機的一種
發表于 09-08 16:30
西門子1500與KUKA工業機器人的Profinet通訊步驟
打開WorkVisual4.0并在線下載KUKA備份,有時候若你不知道使用該軟件的哪種版本的話,你可以從機器人控制柜拷出來,一般機器人發貨時會把能用到的軟件都備份在機器人的控制柜內,這
KUKA8.3系統WorkVisual AddOnVKR控制心得
在配置時焊鉗與一個或多個驅動裝置接口連接。一個對接焊鉗最多可以與 7 個驅動裝置接口連接。一個固定焊鉗只能與一個驅動裝置接口連接。每個驅動裝置接口與一個現場總線設備連接。

WorkVisual中的安全配置
新添加的機器人控制系統在 WorkVisual 中無局部安全配置。一個無安全配置的機器人控制系統的識別特征是,窗口項目結構的選項卡設備下的節點文字說明“安全控制” 為斜體:安全
簡單介紹KUKA外部軸應用
對于舊的8.2X系統使用的外部軸插件是SynchroMove 對于最新8.3X系統 要分兩種: WorkVisualAddOnVKR: 用于氣伺服焊鉗和其他軟件控制電伺服焊鉗或其他伺服

KUKA.Ethernet KRL.學習心得
EhternetKRL是KUKA提供的一個以太網通信功能的軟件包,支持TCP和UDP協議.首先是軟件包的安裝,軟件包的安裝有兩種方式,一種是操作示教器安裝(常用的方法),另一種是通過WorkVisual安裝,通過示教器安裝是常用的方法,
如何創建WorkVisual項目
創建 WorkVisual 項目 -打開 WorkVisual 項目(始終使用機器人控制器中的項目) - 將控制設置為主動控制 從“目錄”窗
WorkVisual將機器人控制系統配給實際應用的機器人控制系統步驟
用該操作步驟可將項目中的每個機器人控制系統分配給一個實際應用的機器人控制系統。然后,項目可從 WorkVisual 傳輸到實際應用的機器人控制系統中。
KUKA機器人系統變量$PRO_NAME所選程序的名稱(參考解釋器)
如果機器人控制器在Multi-Submit模式下操作(僅適用于KUKA系統軟件8.3及更高版本),則變量無效。多提交模式下機器人控制器的
KUKA機器人密碼介紹
在使用workvisual對程序進行更改時提示需要輸入用戶名與密碼,此時一頭霧水,機器人工程師也蒙圈,在查找資料后kuka的默認
發表于 05-19 17:33
?5905次閱讀
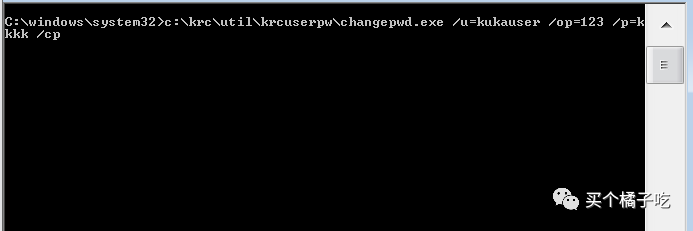
更改KUKA C 4 Windows系統的密碼
或者可以通過 WorkVisual 更改密碼。如果在機器人控制系統上安裝了 KUKA.NonAdmin,則只能通過 WorkVisual 更改該密碼。





 工商網監
工商網監
評論