 MEMS和FOG的精確導航之爭
MEMS和FOG的精確導航之爭
Chris Goodall博士, Sarah Carmichael, 和 Bob Scannell
光纖陀螺儀(FOG)以前曾經是環形激光陀螺儀(RLG)等其他技術的低成本替代品,現在該技術面臨著新的競爭。微機電系統(MEMS)陀螺儀開始搶奪傳統FOG應用的市場份額。具體來說,天線陣列穩定、農業機械控制、常規車輛導航成為MEMS和FOG對峙的戰場。
為了確定用于導航應用的這兩種技術之間的相似點,我們將對選定的高端MEMS陀螺儀與低端FOG陀螺儀進行比較。我們在分析中使用了導航軟件和測試案例作為控制,以確定MEMS是否真正為在戰術導航性能水平上使用做好了準備。
MEMS用于精確導航
過去幾年中,MEMS在導航行業日益受到青睞,因為它提供更好的誤差特性和環境穩定性、更高的帶寬和更出色的g靈敏度,而且嵌入式運算能力的應用日益廣泛,可以運行高級融合和傳感器誤差建模算法。
新的精密慣性導航系統(INS)市場正在形成氣候,MEMS技術也在進入以往被FOG技術主導的市場。從FOG到MEMS技術的一個明顯轉變是天線陣列穩定應用。
機器控制應用也可以得益于MEMS技術的進步。以前,用戶偏好價格30,000美元以上的FOG或RLG導航系統,因為其精確度和可靠性比具有代表性的1,000美元MEMS導航系統高出20倍。低成本MEMS導航系統的改進使很多應用受益極大,精密農業和UGV/UAV/USV便是其中兩個典型的例子。
實時導航硬件
本例中使用的導航系統的設計目的是為電機提供高速率的高度輸出,然后該電機再讓車輛頂棚上的天線陣列達到穩定。天線陣列的用途是維持與地球同步衛星之間的通信。
該導航系統用作束帶式INS/GNSS導航器,提供高速率的位置和速度數據。慣性測量單元(IMU)數據以1000 Hz頻率流向導航濾波器,這些數據包用于預測位置、速度和高度。從雙天線獲取的GNSS位置、速度和航向用作對導航濾波器的更新。當GNSS不可用時,則使用磁力計來幫助初始化航向。使用氣壓計來幫助確定高度。
特殊校準程序與導航濾波器并行發生。這些程序校準磁力計、雙天線安裝對準誤差、IMU安裝對準誤差,還校準車輛振動水平以便進行靜態期檢測。
該系統可在兩種硬件配置中工作。第一種配置包括兩個FOG(檢測航向和俯仰角)、一個MEMS陀螺儀(檢測滾動)、三軸MEMS加速度計、三軸MEMS磁力計、MEMS氣壓計,傳感器硬件的總物料成本(BOM)約為8,000美元(小批量)。
第二種配置包含三個MEMS陀螺儀(用于檢測所有方位角),以及與前一種配置相同的三軸MEMS加速度計、三軸MEMS磁力計和MEMS氣壓計,總成本約為1,000美元(小批量)。這些系統的價格可能隨著市場條件和訂貨量而波動,但通常而言,FOG的價格比MEMS高出八至十倍。
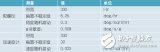
為此設計選擇的MEMS陀螺儀和加速度計具有在同一價位中非常出色的偏置穩定度、正交性、g靈敏度和帶寬。這種系統的主要限制是帶寬要求高。很多MEMS加速度計提供高帶寬,但MEMS陀螺儀通常僅有100 Hz或更低的帶寬。對于普通車輛導航,這一點還不會產生影響,但此系統是針對需要適應高速率控制的應用設計的。此外還有幾種MEMS陀螺儀提供良好的偏置穩定度,但帶寬降低或噪聲很高。為本系統選擇的MEMS陀螺儀在帶寬和性能之間達到了平衡。表1給出了所選MEMS的實際規格。
| 測量 | 值 | 單位 | |
|
陀螺儀 |
帶寬 | 330 | Hz |
| 偏置不穩定度 | 6.25 | deg/hr | |
| 角向隨機游動 | 0.3 | deg/sqrt(hr) | |
| g靈敏度 | 0.009 | deg/s/g | |
|
加速度計 |
帶寬 | 330 | Hz |
| 偏置不穩定度 | 32 | μg | |
| 速度隨機游動 | 0.023 | m/s/sqrt(hr) |
慣性MEMS的采用率處于上升態勢。因此,人們為發展該技術進行了大量投資。
本系統中使用的MEMS陀螺儀采用多核架構,該架構在穩定度、噪聲、線性度和線性g性能之間達到了優化平衡。完全差分四諧振器與片內高性能信號調理密切配合,使得諧振器的必需響應范圍較小,位于高度線性區,并且提供高抗振動性能。
由于MEMS陀螺儀和加速度計集成到多軸IMU中(參見圖1),傳感器的x/y/z正交性可能成為主要誤差源。通常將這種誤差規定為跨軸靈敏度或對準誤差。常見規格是±2%跨軸靈敏度。本系統的IMU具有0.087%的跨軸靈敏度(0.05度正交性)。更重要的是,由于器件特定的校準在出廠前完成,此規格在溫度范圍內有效。對于特定旋轉速率,例如在偏航軸上,正交軸的速率輸出等于CrossAxisSensitivity*YawRate,即使滾動軸和俯仰軸上的實際旋轉為零。2%的跨軸誤差通常會導致除了本有的陀螺儀噪聲之外,還會增加一個數量級的軸外噪聲;而此處IMU的0.087%靈敏度與本有的陀螺儀噪聲水平達到精確平衡。
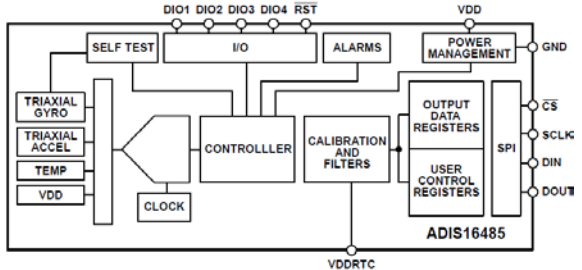
圖1. MEMS IMU配置(ADIS16485)
可用帶寬及其與跨軸相位匹配能力的關系對于多軸設計也至關重要。有些陀螺儀結構帶寬有限,與總降噪有關,而有些結構帶寬有限(通常低于100 Hz)是由于反饋電子器件中使用的傳感器處理導致的。這可能導致通過傳感器信號路徑的相位相關誤差波動增加,特別是在卡爾曼濾波器中。MEMS IMU的可用帶寬為330 Hz,采用嵌入式的可調濾波系統,提供合理平衡的方法,較大程度地減少總誤差源,并通過嵌入式濾波實現系統特定的誤差優化,即便在場中也是如此。
在此MEMS IMU中使用的核心傳感器具有固有的振動抑制能力和線性度,不僅使得它們的性能適合高動態應用,而且還在極端環境條件下具有穩定性和可預測性。
本設計使用的FOG是綜合權衡價格、性能和尺寸這幾種因素選擇的。FOG的帶寬、偏置穩定度和噪聲水平是最終選擇傳感器的決定性因素。表2給出了重要的性能參數。與MEMS相比,FOG具有更好的偏置穩定度,角向隨機游動也有了顯著改進。
| 性能測量 | Value | Units | |
|
陀螺儀 |
帶寬 | 1000 | Hz |
| 偏置穩定性 | 3 | deg/hr | |
| 角向隨機游動 | 0.1 | deg/sqrt(hr) |
導航軟件
實時導航軟件在1,000 Hz下處理解決方案,結合使用傳統的SINS機制和測量更新。測量更新來自多個來源,包括:
GNSS位置和速度
雙天線航向更新
磁力計航向更新
氣壓計高度更新
來自車輛OBDII的可選速度更新
所有更新都用于糾正僅INS解決方案的漂移,但更新本身也可能中斷或不準確。
雙天線航向更新具有良好的精確度,但易受多路徑影響。因此,雙天線航向更新僅在開放天空環境中是可靠的。對于來自GNSS接收器的位置和速度預測,情況同樣如此,也會從SBAS受益。
來自磁力計的航向預測可能由于在校準期間的垂直可觀察性不佳,而受到較大傾斜角的影響。磁力計在含鐵物質周圍也可能不精確,例如在其他車輛旁邊行駛時。因此,磁力計用于在GNSS不可用時幫助初始化系統,或在GNSS長時間中斷時(例如20分鐘)幫助減小航向漂移。
氣壓計用于在GNSS不可用或不精確時幫助獲取高度讀數。速度更新用于在沒有GNSS更新的情況下防止速度漂移,特別是在沿航跡方向。這些速度更新也可幫助減少解決方案的位置不確定性,這有助于抑制不準確的GNSS位置更新。整個導航軟件的設計目的是在任何GNSS條件下提供精確結果。
導航測試
為了正確比較兩個系統,我們設計了三個系統級導航基準測試:
在具有良好GNSS信號的開放天空環境下評估滾動、俯仰和航向的精確性。
GNSS多路徑場景,例如在城市中心區,由于存在高層建筑,GNSS解決方案質量可能不好。本測試的目的是比較濾波位置性能,它也會顯示高度和速度誤差。
僅INS性能測試,旨在評估INS位置漂移,也代表速度和高度性能。
開放天空高度結果
在GPS可用且位于多個衛星的直射范圍內的情況下,兩個系統的定位和速度結果是相似的。方位角(滾動、俯仰和航向)是我們比較的主要導航參數,因為它們在很大程度上是由陀螺儀性能決定的。
| FOG | MEMS | |
| 滾動RMS誤差(度) | 0.08 | 0.10 |
| 俯仰RMS誤差(度) | 0.08 | 0.10 |
| 航向RMS誤差(度) | 0.13 | 0.14 |
當GNSS可用時,兩種系統的高度性能幾乎是相同的,但FOG具有大約5%的優勢。
不良信號GNSS定位結果
下一個測試的目標是在存在GNSS多路徑的情況下比較兩個系統。行駛軌跡位于卡爾加里市的中心城區,包括一些很窄的小巷,車行緩慢,同時周圍布滿高層建筑。
現在,性能測試重點包括了定位結果,因為在缺少高質量GNSS測量的情況下,陀螺儀可能對位置性能產生很大影響。此測試結果顯示兩個系統的性能相當。但是,FOG系統高出大約20%至30%。
圖2顯示了僅GPS解決方案的示意圖。在對復雜的中心城區行駛軌跡進行導航時,本測試使用的高精度GPS接收器遇到了嚴重的信號反射。僅GPS解決方案的誤差多達100米。

圖2. 多路徑下僅使用GPS的結果
紅色的FOG集成解決方案(圖3)清晰顯示中心城區車輛的行駛路徑,精確到10米以內。

圖3. FOG/GPS集成解決方案(FOG+GPS為紅色,僅GPS為藍色)
MEMS解決方案在圖4中以綠色顯示,始終在15米之內。該解決方案更易受到不精確GNSS位置更新的影響,因為INS預測的權重較低。

圖4. MEMS/GPS集成解決方案(MEMS + GPS為綠色,僅GPS為藍色)
為幫助MEMS解決方案克服不精確的GPS更新,我們使用了額外的傳感器。圖5顯示將OBDII添加到系統以獲取車輛速度。
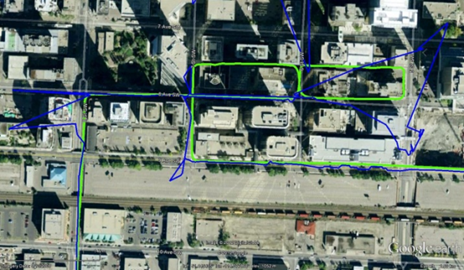
圖5. MEMS/GPS/OBDII集成解決方案(MEMS + GPS + OBDII為綠色,僅GPS為藍色)
MEMS解決方案始終在10米之內,甚至可能稍優于沒有OBDII的FOG,如圖6中的放大圖所示。

圖6.帶有 OBDII的MEMS(綠色)與沒有OBDII的FOG(紅色)、僅GPS(藍色)比較
僅INS結果:示例和基準
兩個系統之間的最后一項比較是僅INS導航測試。系統使用開放天空GNSS更新進行融合。然后斷開兩個系統的天線連接,持續4.5分鐘,位置漂移用作性能指標。在此時間內行駛的距離約為5500米。
圖7顯示了整個軌跡。藍色直線從右下方延伸至左上方,在右下方GPS斷開連接,在左上方GPS重新連接。
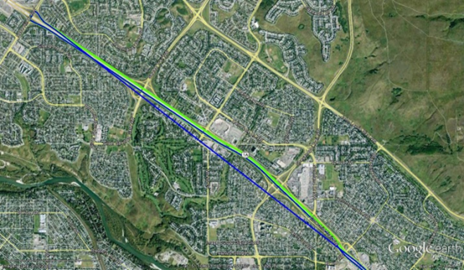
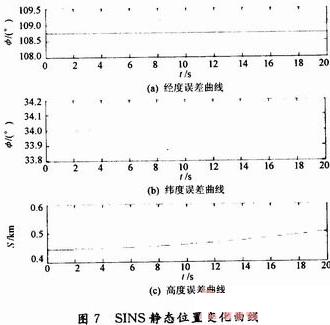
圖7. 僅INS測試路徑
在這次GNSS中斷期間,FOG系統的運行情況很好,最大漂移為7米,如圖8所示。5分鐘之后,FOG系統的典型漂移性能基準測試結果為25米,因此這次特殊中斷的情況略好于典型性能。
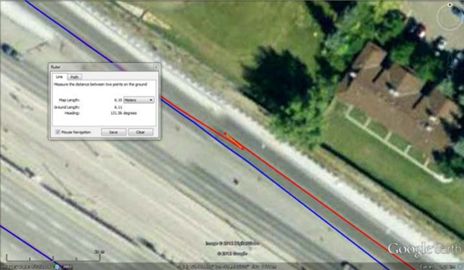
圖8. 僅FOG漂移
在沒有GNSS更新的情況下,MEMS系統在4.5分鐘之后的漂移為75米。此類漂移大多為沿航跡誤差,主要是由于加速計導致的。MEMS系統的基準測試結果是在沒有GNSS更新的情況下,5分鐘后的典型漂移為75米,比FOG漂移大三倍左右。

圖9. 僅MEMS漂移
為MEMS系統添加OBDII更新之后,漂移改進至小于10米,與FOG解決方案相當。在沒有GNSS更新的情況下,帶有OBDII的MEMS系統的典型基準性能在5分鐘之后產生大約30米的位置漂移,也與FOG基準結果相當。
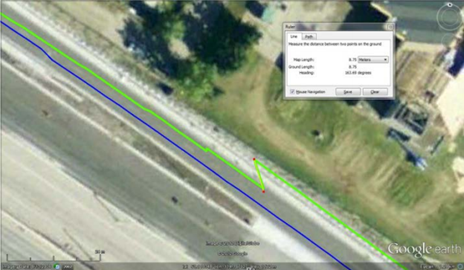
圖10. 帶有OBDII的MEMS系統的漂移
結束語
FOG和MEMS兩者相比非常接近,特別是現在MEMS的性能正在接近FOG戰術級性能水平。FOG仍然在性能上具有優勢,但其成本卻比MEMS高出10倍。如果可以使用GNSS,而且應用的目的是在開放天空環境中運行,則MEMS可以取代一些低端FOG。如果應用的目的是在信號不良的GNSS環境中使用,MEMS也可以取代一些FOG 系統,但性能要低20%至30%。
在獨立INS性能方面,FOG仍然具有優勢,但如果應用能夠接收車輛或平臺速度更新,則MEMS系統可以達到與獨立FOG系統相同的性能水平。
隨著MEMS技術的持續進步,以及其他傳感器(例如OBDII)的輔助,MEMS取代FOG技術可能在不久的將來實現。
審核編輯:郭婷
-
傳感器
+關注
關注
2548文章
50740瀏覽量
752143 -
mems
+關注
關注
129文章
3903瀏覽量
190376 -
陀螺儀
+關注
關注
44文章
780瀏覽量
98589
發布評論請先 登錄
相關推薦
MEMS陀螺儀系統的精確導航
采用MEMS優化移動機器人的導航性能
意法半導體推出支持汽車精確定位控制的新款高精度MEMS傳感器
MEMS技術縮短了其與FOG和其它傳統慣性技術的性能差距
MEMS和FOG的精確導航之爭
MEMS器件的低成本微慣性導航系統設計
MEMS和FOG技術之間的戰爭 誰會戰到最后
MEMS陀螺儀可否取代光纖陀螺儀技術







 工商網監
工商網監
評論