 TOF激光雷達的類別
TOF激光雷達的類別
兩三年前,在提起激光雷達時,很多人都會有一種“技術路線太多,我傻傻分不清哪個是哪個”的印象。暫不提離量產還有一段距離的FMCW激光雷達,僅以TOF激光雷達中的“半固態/固態”為例,按波長、集成度及掃描模塊都可以分為好多個類別。
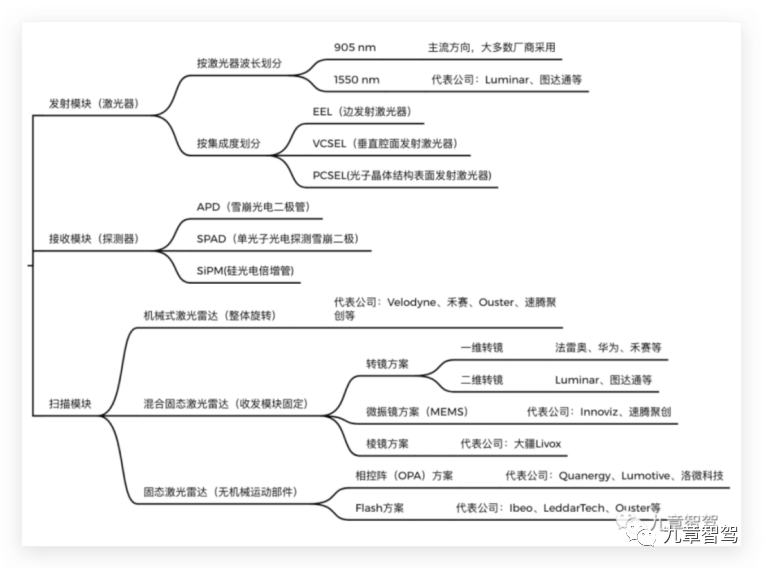 ?△(圖表由九章智駕整理于2021年8月份)
?△(圖表由九章智駕整理于2021年8月份)
不過,根據各激光雷達廠商在今年1月CES及4月上海車展上釋放的消息看,半固態激光雷達(TOF)的技術路線正在快速收斂中。可以簡單總結為如下三點:
1.MEMS正在被邊緣化,轉鏡式漸成行業共識;
2.激光器的波長方面,多家原來主打1550 nm的,在新產品中開始轉向905 nm;
3.集成度方面,高密度收發線列(芯片化)成為“眾望所歸”。
一、掃描方式的“大一統”:MEMS被邊緣化,轉鏡漸成行業共識
在半固態的三種掃描路線中,棱鏡式僅僅是“曇花一現”,在過去兩年,真正參與“爭天下”的實際上只有MEMS和轉鏡式兩類。由于兩種技術路線都有好多玩家采用,并且也都有機會拿到主機廠定點,因此,至少從表面上看,這兩種技術路線在當年是“不分伯仲”。
不過,事情正在迅速變化。
2021年下半年,有激光雷達業內人士向筆者透露,某在MEMS領域有深厚積累的德系Tier 1的激光雷達已放棄了堅持很久的MEMS路線;在過去半年里,MEMS路線“鼻祖”Innoviz推出的新品Innoviz Two也放棄了MEMS路線。
Innoviz Two沒有公布掃描路線,但從點云圖案看,它的掃描方案應該就是轉鏡式。
國內公司中,探維的新品Duetto也不再走該公司之前一直堅持的MEMS路線,而是改為轉鏡;另外,據某此前一直在死磕1550+MEMS路線的二線激光雷達公司的離職技術人員透露,該公司在后續的產品規劃中也放棄了MEMS,改做轉鏡。
其實,在過去的兩三年里,采用MEMS掃描方案的激光雷達能否過車規、是否適合批量化生產,一直是存在爭議的。概括起來,“反方”觀點主要有如下幾點——
1. 點云規整度差
“點云規整”的定義是點云的排列橫平豎直,點與點之間的角度分辨率基本一致 + 空間相鄰點的時間戳也相鄰,好處是運動畸變更有規律,更有利于算法補償。MEMS單一激光器的視場角很小,總視場需要幾個激光器拼接而成,拼接處的規整度會受到影響;同時由于微振鏡的諧振運動,很難做到精確的“矩陣式”定位,且車輛行駛中的運動會加大振鏡的運動控制誤差,從而進一步影響規整度。
2. 激光器數量少,單個失效后果更嚴重
由于MEMS方案可以通過微振鏡在二維方向上的運動實現激光雷達線束的快速掃描,其等效線束能夠輕易突破“100線”甚至是“200線”,因此,MEMS需要的激光器數量往往比一維轉鏡(有多少線,就有多少個激光器)激光雷達要少很多。
激光器的數量越多,單個激光器失效時產生的影響也就越小。而對于MEMS激光雷達,一個激光器失效,即意味著一大片視場的缺失(對于轉鏡掃描的激光雷達而言,一個激光發射器的缺失只會使這條線探測到目標上的點云數減少,但不會完全致使大片視場區域的完全失效)。
3. 激光器的工作強度過大,導致壽命縮短
車企們在選擇激光雷達時特別看重點云密度,有的車企甚至提出按點云密度來算應該付多少錢。影響點云密度最關鍵因素是“點頻”(激光的發射頻率),即激光雷達在一秒鐘內發射了多少束激光。為了達到同樣的點頻數,MEMS由于激光器數量少,單個激光器不得不拼命提高點頻,高強度的點頻輸出使得激光器的壽命受到影響。
之前,某激光雷達公司產品經理在接受九章采訪時曾做了個形象的類比:“你有六頭牛,正常情況下每天可以產10公斤奶。現在為了沖業績,讓每頭牛每天擠20公斤奶,這樣看似整體產奶量得到了立竿見影的提升,但實際上每頭牛的負載很大,大概率導致奶牛提前‘退休’。”
我們計算了三家激光雷達公司的單激光器負載,得到下面的圖,可以看出激光器數量最少的單個負載是數量最多的的近百倍。
4. 受振鏡尺寸限制,性能和可靠性難以兼得
為降低系統復雜度,目前市面上的硅基MEMS激光雷達都采用結構緊湊的同軸方案。同軸掃描方案的特點是光發射通道與光接收通道共用一個對外的鏡片,激光束經過一面穿孔的反射鏡,入射到振鏡的鏡面上。此方案的測距能力MEMS微振鏡的鏡面尺寸成正比,視場角與振鏡的運動幅度成正比,也就是說,為了提高整體性能,不僅要求MEMS微振鏡的鏡面尺寸盡可能大,而且需要保證振幅不能太小。
但大尺寸的MEMS振鏡會嚴重影響整體可靠性。大尺寸振鏡對驅動其振動的快軸、慢軸的負擔也更大。MEMS的懸臂梁結構非常脆弱,這兩對扭桿中,又細又長的為慢軸,又短又粗的為快軸,兩者同時對微振鏡進行反向扭動,外界的振動或者沖擊極易直接致其斷裂。
也就是說,硅基MEMS振鏡尺寸越大,就越難以滿足車規的DV、PV對可靠性、穩定性、沖擊、跌落的測試要求。目前市場上主流MEMS激光雷達的探測距離可以達到150米@10%,但很難再往上提升了,原因正在于此。也就是說,MEMS路線的迭代空間很容易受到限制。
兩年前,筆者從某激光雷達公司產品經理聽到這樣一段話:“當前,MEMS振鏡的尺寸能做到5mm已經是到極限了,也有個別供應商做到了7mm的demo,但中科院一個做MEMS的老師說‘圈子里做MEMS的公司他全部都認識,他不相信目前有誰的7mm MEMS能量產’。”
今年2月,筆者聽投資機構的朋友說上海有一家激光雷達上游創業公司做出了“直徑在8mm以上的大尺寸MEMS,已經開始送樣”“如果能用的話,可能會成為MEMS跟轉鏡兩條技術路線決戰的分水嶺”,不過,筆者在最近向其送樣客戶做調研后得到的反饋是:不如轉鏡和棱鏡。
MEMS“大尺寸化”嘗試的折戟,反映出這條技術路線突破天花板的難度之大。接下來,會不會有其他做MEMS激光雷達的公司也推出轉鏡方案呢?我們拭目以待。
在多家走MEMS掃描路線的公司紛紛推出轉鏡方案的同時,北醒的最新產品AD2普通款、鐳神的最新產品CX128S1、萬集的最新產品WLR-739也都是轉鏡式。此外,法雷奧、Luminar、圖達通和華為一直在堅持轉鏡路線,而Livox近兩年也在新一代產品上切換至轉鏡路線。
轉鏡路線又分為一維轉鏡和二維轉鏡。在走轉鏡路線的玩家中,法雷奧、禾賽、華為等采用了一維轉鏡,Luminar、圖達通采用了二維轉鏡,其他幾家的情況我們暫不清楚。
兩者的區別是:一維轉鏡通過旋轉的多面體反射鏡,將激光反射到不同的方向;二維轉鏡顧名思義內部集成了兩個轉鏡,一個多邊棱鏡負責橫向旋轉,一個負責縱向翻轉,實現一束激光包攬橫縱雙向掃描。
理論上,一維轉鏡和二維轉鏡都是可以達到車規級量產水平的方案。具體到兩個技術方案,一般來說,集成的激光器越多,需要的掃描方式就越簡單,即多激光器+一維掃描,少激光器+二維掃描。
一維轉鏡由于只有水平方向在做機械運動,并且轉速更慢,因此可靠性更高一些;二維轉鏡是水平、垂直兩個方向都有鏡子在做機械運動,轉速更快,因此在做好動平衡、NVH、壽命和成本之間的協調會難度更大一點,但它的好處是激光器數量減少,在不采用更昂貴的激光器的情況下,有可能將成本做得更低。
一維轉鏡有個明顯的特征是“要做到多少線,就需要多少個激光器”,這是一把雙刃劍:前幾年,由于激光發射端的集成度很不高,如果線數過高,有很多個激光器組成的系統的復雜度就過高,因此,早期的一維轉鏡線數都做不高。在這種情況下,為了將線數做高,不少廠商都選擇了二維轉鏡方案。
但隨著芯片化方案的成熟,發射端集成度的提高有了可能。2021年,禾賽率先做到了垂直方向上128線的集成,隨后,有很多廠商也開始在高線數激光雷達上嘗試采用一維轉鏡方案。
二、激光器波段的“大一統”:905逐漸成為共識
在掃描路線收斂的同時,激光器波段也在收斂。在本次上海車展上,還有一個有意思的現象是:之前一直專注于1550的圖達通和鐳神均推出了905nm的前視主激光雷達(產品分別為Robin-E和CX128S1)。
另據九章智駕了解,某原本死磕MEMS+1550的二線激光雷達廠商在下一代產品將掃描方案由MEMS改為轉鏡的同時,激光器的波段也從1550轉向了905。
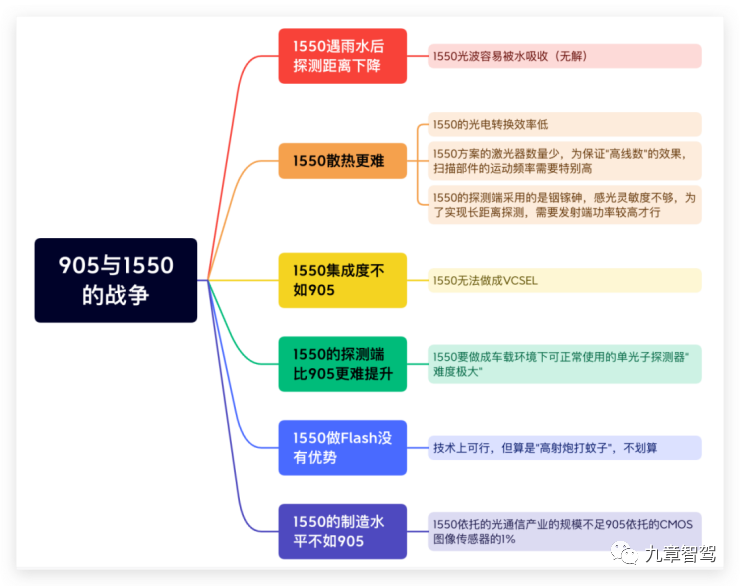
這三家以1550起家的激光雷達廠商紛紛擁抱905,似乎是在客觀上回應了筆者于去年8月份發布的《激光雷達:905與1550的戰爭》一文中的觀點。
筆者寫《激光雷達:905與1550的戰爭》這篇文章的緣起是,去年4月份,筆者偶然在禾賽技術負責人在微信朋友圈看見如下一段話:
最終讓我們放棄1550的原因是通過對未來技術和產業鏈的研判,我們認為幾年后,1550即使在性能上也會輸給905,而且一旦905性能超越了1550后,之后的差距會被越拉越大。之后我們將幾乎所有的研發資源投入了硅基路線,專注于905nm激光雷達的上游核心零部件及芯片的開發。
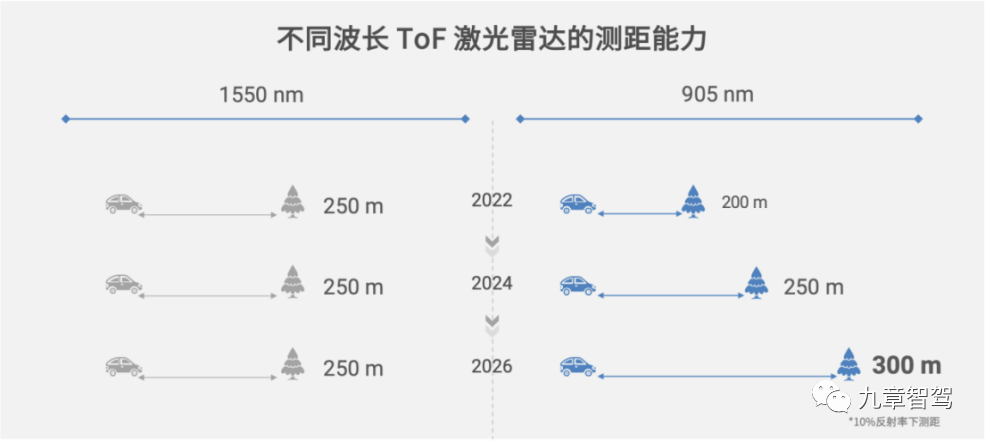
△圖中數據來源于某905 nm激光雷達廠商
出于好奇,筆者帶著拿著這段話跟激光雷達產業里的將近20個人聊了一波,并一步步挖掘出了“幾年后,1550即使在性能上也會輸給905,而且一旦905性能超越了1550后,之后的差距會被越拉越大”的原因。在此摘要如下:
當時,這篇文章在行業里引起了巨大反響。
這次上海車展期間,某中小激光雷達公司CEO在跟筆者交流時還提起這篇文章,表示認同文中的分析思路及觀點。這家激光雷達既做905又做1550(賣給汽車行業客戶的是905產品,賣給高鐵、地鐵等行業客戶的是1550產品),因而沒有理由“站隊”。
與905相比,1550最為人稱道的優勢在于其探測距離。而在車展前夕,禾賽發布了905nm的艙內激光雷達ET25,這款激光雷達的探測距離為250米@10%,跟主流的1550激光雷達已沒有差距。
據禾賽解釋,能夠做到尺寸如此超薄、同時性能又更上一層樓,這得益于禾賽新一代的自研收發芯片,其激光收發模塊使 ET25 接收芯片靈敏度有數倍的提升。
李一帆稱,ET25在行業里具有轉折性的里程碑意義。“歷史上我們用905納米的激光雷達,大家最主要的批評意見認為是‘測距不行’。今天大家可以看到,905nm激光雷達的探測距離也可以做到250米,因此,關于‘905nm測距不行’這個話題,到今天就可以結束了。”
ET25的推出,從實踐層面上印證了禾賽技術負責人去年4月份在微信朋友圈發的那段話的背后存在“知行合一”。
三.收發端結構/集成度的“大一統”:高密度收發線列或面陣
在2021年8月份的《什么是激光雷達的“發動機技術”?一文講透行業技術壁壘》一文中,九章特別提到,對激光雷達來說,選擇什么掃描方式只是“表象”,真正的“發動機技術”在于激光收發技術,也就是芯片化能力。
在激光收發技術中,用什么波段,主要是一道“選擇題”;而如何通過芯片化來提高收發系統的集成度,進而提升整機的性能、可靠性,降低成本及制造難度,達到車企能夠認可的“黃金平衡點”,就是一系列更復雜的“問答題”了。
2020年,禾賽在國內同行中率先公開提出將激光雷達的收發端芯片化,而如今,芯片化已成為行業共識。
收發端的芯片化,有向供應商采購和自研兩條道路,禾賽選擇了自研。禾賽CEO李一帆認為,從蘋果和特斯拉的例子來看,自研的芯片與自家產品適配度更高,迭代更快。
禾賽公開的信息顯示,不同模塊的芯片化是分階段來進行的。
在V1.0階段(2020年下半年),率先實現芯片化的是XT系列,禾賽將EEL激光發射器和APD探測器的驅動模塊(即多通道激光驅動芯片,多通道模擬前端芯片、高速ADC芯片)集成至芯片中;
在V2.0階段(從2022年開始量產的AT128開始),激光器從 EEL 升級為 VCSEL,探測器演進為 SiPM 單光子探測器。這個階段自研的芯片為適配 VCSEL 的多通道驅動芯片、適配 SiPM 的多通道模擬前端芯片以及高速ADC 芯片。
在V3.0階段(純固態FT120即將搭載)和V4.0階段則采用集成度更高、通道數更多的探測器面陣芯片。
在芯片化之后,激光雷達就可以享受到摩爾定律的紅利,性能快速提升、成本快速下降。一個可參照的事實是:在過去20年里,芯片化的設計使手機攝像頭的分辨率每兩年就翻一翻。也就是說消費者用同樣的價格,買到了比原來性能高200倍的攝像頭。
“以AT128為例,芯片化使收發模組在激光雷達總成本中的占比從多少降到多少?”在4月份的車展前夕,筆者向禾賽技術負責人拋出上述問題。
禾賽技術負責人的回答是:如果還是按之前的分立系統來做的話,激光雷達光是收發通道成本就得幾千美元,而如今的激光雷達單線收發成本僅有原來的1/20。
未來,禾賽還打算通過芯片化技術構建激光雷達產品的核心架構,構建技術中臺,讓服務于不同市場的產品線共用一套架構。共用架構會使得不同產品的物料和生產線盡量保持一致,通過規模化效應降低物料采購成本。
芯片化的架構同時有助于自動化產線的建設,將手工的精準裝調轉化為由半導體設備保障精度,且保持不同產品的自動化產線間的一致性,進而降低自動化產線的開發難度和生產成本。
實際上這也是所有激光雷達公司今后都要走的路,只不過各家的進展會有差異而已。
結語:在“技術路線之爭”面前保持定力
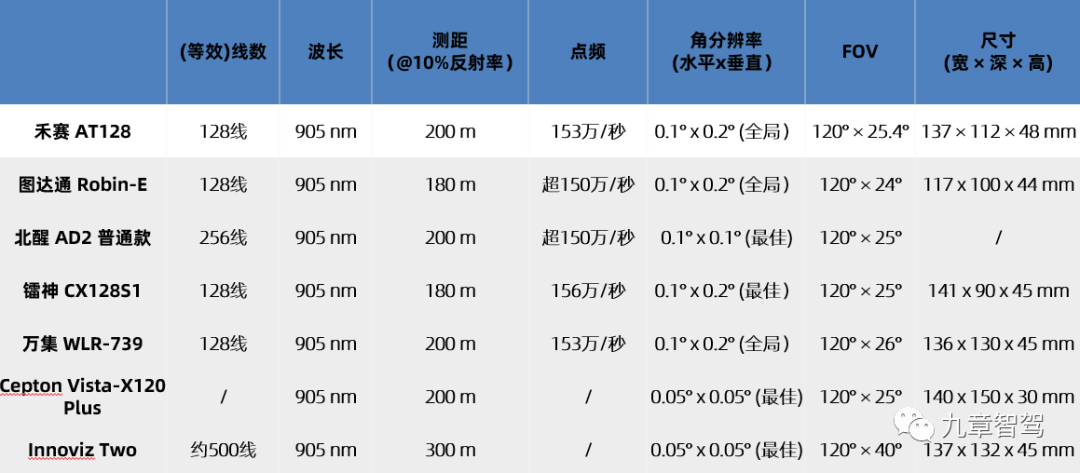
上圖中的產品,除禾賽AT128外,均是近半年內推出的、尚未開始量產。從參數上來看,180-200米的測距,150萬/秒上下的點頻,120° × 25° 左右的FOV,均與禾賽AT128非常接近。
很顯然,AT128隨著理想L系列車型的熱銷一舉成為“車載激光雷達爆款產品”已是業內公認的事實。可以說,禾賽率先成功定義了第一批遠距ADAS激光雷達產品,它的成功量產上車是里程碑式的,引得其他廠商紛紛效仿。
禾賽能成為行業的引領者,并不是偶然的。
在梳理了激光雷達過去幾年的一系列技術路線之爭之后,筆者發現,總體而言,禾賽在技術路線的選擇上是“以終為始”,沒有走過太多彎路。
當大家都在爭論轉鏡、棱鏡和MEMS哪種掃描路線“更好”時,禾賽在短暫嘗試過MEMS后發現“不合適”,果斷放棄,然后是,在2023年,我們看到,MEMS路線開始被邊緣化。
當1550“更長的探測距離”令很多人心動的時候,禾賽在做過一段預研后認為“長期來看,905更有潛力”,于是all in 905,然后,在2023年,我們看到,諸多原先專注于1550的廠商紛紛推出了905產品。
芯片化,更能體現出禾賽對技術趨勢理解的前瞻性。直到2020-2021年,筆者在跟一些國內的激光雷達廠商的人聊起芯片化時,大家還語焉不詳,而禾賽早在2017年就成了了芯片設計團隊。
不過,肯定還有人會好奇這樣一個問題:禾賽現在的重心都在TOF激光雷達上,如果未來FMCW激光雷達成熟了,禾賽會不會就會掉隊?
首先,與TOF激光雷達相比,FMCW激光雷達固然有不少優勢,但它能否“干掉”TOF,是存在很大爭議的——詳情請參考九章智駕在2021年10月份發布的《FMCW激光雷達科普(下):主要挑戰、前景及市場格局》。
其次,禾賽在FMCW上也有技術儲備(詳見禾賽招股書)。
還有,即便是FMCW激光雷達會成為主流,主機廠在選量產項目供應商時,也會更傾向于選擇量產交付經驗足、工程化能力強的供應商。
責任編輯:彭菁
-
模塊
+關注
關注
7文章
2674瀏覽量
47350 -
激光雷達
+關注
關注
967文章
3943瀏覽量
189625 -
TOF
+關注
關注
9文章
478瀏覽量
36276
原文標題:TOF激光雷達告別“技術路線之爭”
文章出處:【微信號:阿寶1990,微信公眾號:阿寶1990】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦

激光雷達分類以及應用
常見激光雷達種類
消費級激光雷達的起航
固態設計激光雷達
從光電技術角度解析自動駕駛激光雷達
機器人和激光雷達都不可或缺
TOF激光雷達
TOF高速單線激光雷達相關資料分享
激光雷達類型:TOF雷達與三角測距雷達
GaN激光雷達普及加速 | 氮化鎵技術如何推動ToF激光雷達產業的加速發展?
雷達排位賽,TOF激光雷達誠邀各路英雄來打榜
物聯網系統中的高精度測距方案_單點TOF激光雷達






 工商網監
工商網監
評論