") Proteus:頸部按摩儀
Proteus:頸部按摩儀
隨著經(jīng)濟不斷發(fā)展以及人們生活節(jié)奏的不斷加快,人們越來越重視身心健康。目前我國的“亞健康”人群的比重已達到70%左右,超過了9億人,而用推拿按摩進行保健是我國中華醫(yī)學的傳統(tǒng)項目,因為老幼皆宜,應用范圍十分廣泛。隨著具有保健功能的各種按摩器等產(chǎn)品出現(xiàn)。也因為在舒緩壓力,緩解疲勞等方面的效果顯著而備受處于“亞健康”生活狀態(tài)的消費者歡迎。巨大的需求與發(fā)展空間一定會讓各種類型的家用按摩機械發(fā)展勢頭強勁,成為健康產(chǎn)業(yè)的新的增長點。在豐厚的利潤和發(fā)展空間的吸引下,我國的不少企業(yè)紛紛涉足按摩器具生產(chǎn)領域。因社會節(jié)奏和工作壓力的逐漸增大,人民需要放松自己來緩減工作的壓力和身心疲憊,因此各種人體保健機械走入大眾家庭。人民在長時間的看書、寫字或在電腦前工作時,常常感到頸部肌肉酸痛,嚴重時還導致頸部不能轉動,領用戶甚為煩惱和痛苦,因此,頸部按摩器應運而生。目前,對于人體的頸部的按摩主要有人為按摩和機械按摩,人為按摩為人工勞動,其受人為因素影響較大,按摩質量上很難到達保證,而且需要到制定的服務場所,且還需要有專業(yè)的人士方可,不能隨時隨地的按摩,便攜式的頸部按摩儀產(chǎn)品繼而產(chǎn)生。
本設計主要針對長時間伏案工作的人,尤其是電腦使用者。頸部按摩器可在工作時使用,要求安全、輕便、舒適;由于是針對頸部,因此按摩器工作時還必須輕柔、舒緩,且不影響使用者低頭工作。
本設計主要解決的技術問題是提供一種基于單片機控制的頸部按摩儀,其結構簡單,按摩電機通過不同信號實現(xiàn)不同按摩模式,振動電機根據(jù)供電開關頻率的不同實現(xiàn)振動的不同模式,加熱模塊根據(jù)檢測的溫度值進行升降溫;根據(jù)按鍵輸入的不同模式,控制模塊輸出不同的信號控制相應的電機實現(xiàn)不同的按摩模式。
技術要求:
(1)按摩儀熱敷恒溫最高50℃。
(2)恒溫溫度范圍40~50℃,恒溫溫度控制精度±1℃。
(3)通過直流電機實現(xiàn)推拿、針刺、捶打三種按摩模式。
(4)控制振動電機的頻率實現(xiàn)高、中、低三擋力度。
熱敷、按摩的時間分為固定時長30min、45min、60min或自己設置任意時長
本設計采用模塊化設計法,以51單片機為核心設計的一款頸部按摩儀,當按摩儀放置在脖頸上時,溫度傳感器將物體的溫度轉換成一定函數(shù)關系的電信號。該電信號先通過前端信號處理電路,然后經(jīng)過A/D轉換電路轉換成數(shù)字信號送入到主控電路的單片機中,單片機通過掃描鍵盤和各種功能開關,根據(jù)鍵盤輸入內容和各種功能開關的狀態(tài)進行判斷、分析和控制,來完成按摩、加熱以及顯示功能。
其硬件結構主要包括:溫度檢測模塊、輸入模塊、控制模塊、電源模塊、按摩模塊、加熱模塊和顯示模塊。其中,最小系統(tǒng)部分主要包括STC89C52RC、晶振電路和復位電路;鍵盤由4X4位矩陣鍵盤組成,可以選擇不同的功能、控制按摩力度及按摩時間;顯示部分由OLED組成。軟件部分由C語言編程,實現(xiàn)對各部分的控制。
按摩功能實現(xiàn):由單片機發(fā)出三種波形(正弦波、方波、三角波)驅動電機,實現(xiàn)對人體的多種按摩模式。
熱敷功能實現(xiàn):經(jīng)過三極管控制加熱片,當其導通后,電阻絲發(fā)熱。
溫度檢測功能:由DS18B20傳入數(shù)據(jù)后進行分析,得到精確到每一攝氏度的當前溫度。
按鍵交互:單片機不斷檢測矩陣鍵盤的被按下的鍵值,調整系統(tǒng)的時間、溫度檔位等。
屏幕顯示:在OLED屏幕上顯示當前按摩力度檔位、按摩和熱敷剩余時間、按摩模式、當前溫度。
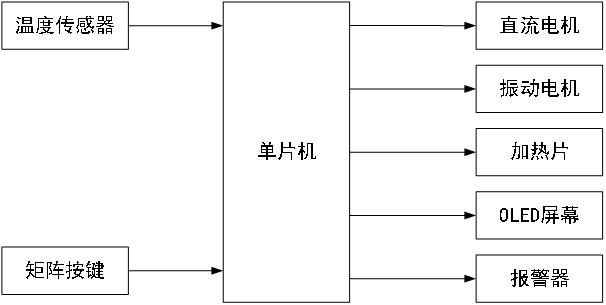
設計一個頸部按摩儀,即基于單片機的多功能按摩儀系統(tǒng)。該系統(tǒng)包括直流電機、振動電機、溫度傳感器、矩陣按鍵、加熱片、OLED屏幕多個部分。
由DS18B20與矩陣按鍵向單片機內傳入數(shù)據(jù)或觸發(fā)程序中斷,經(jīng)過內部處理后對直流電機、振動電機、加熱片和OLED屏幕實現(xiàn)不同的控制和顯示功能,以完成本次設計內容。
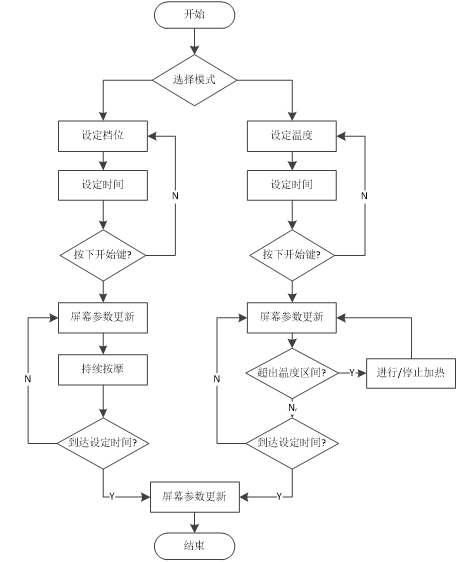
2.2總流程圖
當上電開始運行時,進入模式選擇界面,此時按鍵被輪流掃描,按下某個按鍵時,單片機獲取該按鍵的鍵值進行分析,判斷是選擇的哪個模式,并繼續(xù)按照該模式對應的程序繼續(xù)運行。
(1)按摩功能
在按摩模式下,首先會進行按摩方式的選擇,通過對不同方式的選擇,單片機會發(fā)出對應的正弦波、方波、三角波去驅動電機,來完成對脖頸的按摩放松。不同類型的波形會產(chǎn)生針刺、捶打、推拿三種形式的按摩;接著,對按摩力度的選擇,有高、中、低三檔力度,使用者可根據(jù)自己的喜好來進行選擇。
按摩模式選擇完后會進行時間的選擇,可以選擇固定的時長30min、45min、60min,也可以自己設置任意時長,當按下開始鍵后,進入按摩狀態(tài),屏幕實時顯示當前剩余時間,直至中途按下停止按鍵或到達設定時長自動停止。
(2)熱敷功能
在熱敷模式下,首先進入對溫度的選擇,初始默認是40℃,最高溫度是50℃,用戶可根據(jù)個人需求使用按鍵對設定溫度進行調整;選擇溫度后進入時間的選擇,默認可選30/45/60min,也可自由任意設置時間,按下開始按鍵后,進入熱敷狀態(tài),屏幕將會顯示當前剩余時間與當前溫度,中途按下停止鍵或時間到達會自動停止運行。
在熱敷狀態(tài)中,如果溫度低于設定的溫度區(qū)間,單片機將會控制加熱片開始工作,實現(xiàn)對按摩儀的審問,直至滿足要求,以此往復盡量保持在溫度區(qū)間,實現(xiàn)動態(tài)調節(jié)保持恒溫。
#include #define uchar unsigned char #define uint unsigned int sbit DQ=P1^3; //數(shù)據(jù)傳輸線接單片機的相應的引腳 unsigned char tempL=0; //設全局變量 unsigned char tempH=0; unsigned int sdata; //測量到的溫度的整數(shù)部分 unsigned char xiaoshu1; //小數(shù)第一位 unsigned char xiaoshu2; //小數(shù)第二位 unsigned char xiaoshu; //兩位小數(shù) bit fg=1; //溫度正負標志 sbit wr=P2^0; //數(shù)據(jù)寫 sbit rd=P2^1; //數(shù)據(jù)讀 sbit ce=P2^2; //片選 sbit cd=P2^3; //指令數(shù)據(jù)通道,1指令,0數(shù)據(jù) sbit rst=P2^4; //復位信號 sbit LED = P1^0; sbit MOT = P1^1; sbit BEEP = P1^2; sbit KEY1 = P3^0; sbit KEY2 = P3^1; sbit KEY3 = P3^2; sbit KEY4 = P3^3; sbit KEY5 = P3^4; sbit KEY6 = P3^5; sbit KEY7 = P3^6; uchar Set_temp = 45; uchar Set_mode = 1; uchar Set_power = 1; uchar Sec = 0; uchar Min = 20; uchar flag; void delay_18(unsigned char i) { for(i;i>0;i--); } void delay_ms(uint c) //誤差 0us { uchar a,b; for (; c>0; c--) { for (b=199;b>0;b--) { for(a=1;a>0;a--); } } } uchar code HZ0[][32]={ {0x00,0x00,0x7E,0xFE,0x04,0x10,0x08,0x20,0x18,0x7C,0x24,0x44,0x42,0x54,0x81,0x54, 0x00,0x54,0x7E,0x54,0x08,0x54,0x08,0x54,0x08,0x28,0x0E,0x24,0xF0,0x42,0x40,0x82},/*"頸",0*/ {0x10,0x00,0x08,0x3E,0x7F,0xA2,0x00,0x24,0x21,0x24,0x12,0x28,0xFF,0xE4,0x00,0x24, 0x00,0x22,0x3F,0x22,0x21,0x22,0x21,0x34,0x21,0x28,0x3F,0x20,0x21,0x20,0x00,0x20},/*"部",1*/ {0x10,0x40,0x10,0x20,0x10,0x20,0x13,0xFE,0xFA,0x02,0x14,0x44,0x10,0x40,0x1B,0xFE, 0x30,0x88,0xD0,0x88,0x11,0x08,0x10,0xD0,0x10,0x20,0x10,0x50,0x50,0x88,0x23,0x04},/*"按",2*/ {0x00,0x80,0x3F,0xFE,0x24,0x10,0x3F,0x7C,0x26,0x38,0x2D,0x54,0x34,0x12,0x20,0x38, 0x27,0xC0,0x20,0x40,0x27,0xF8,0x20,0x40,0x2F,0xFE,0x40,0x40,0x41,0x40,0x80,0x80},/*"摩",3*/ {0x08,0x80,0x08,0x48,0x0A,0x48,0x12,0x08,0x12,0x08,0x31,0x10,0x31,0x10,0x51,0x10, 0x90,0xA0,0x10,0xA0,0x10,0x40,0x10,0x40,0x10,0xA0,0x11,0x10,0x12,0x08,0x14,0x06},/*"儀",4*/ {0x01,0x00,0x21,0x08,0x11,0x08,0x09,0x10,0x09,0x20,0x01,0x00,0x7F,0xF8,0x00,0x08, 0x00,0x08,0x00,0x08,0x3F,0xF8,0x00,0x08,0x00,0x08,0x00,0x08,0x7F,0xF8,0x00,0x08},/*"當",5*/ {0x10,0x10,0x08,0x10,0x08,0x20,0xFF,0xFE,0x00,0x00,0x3E,0x08,0x22,0x48,0x22,0x48, 0x3E,0x48,0x22,0x48,0x22,0x48,0x3E,0x48,0x22,0x08,0x22,0x08,0x2A,0x28,0x24,0x10},/*"前",6*/ {0x10,0x20,0x11,0x24,0x10,0xA4,0x10,0xA4,0xFC,0xA8,0x10,0x20,0x33,0xFC,0x38,0x04, 0x54,0x04,0x50,0x04,0x91,0xFC,0x10,0x04,0x10,0x04,0x10,0x04,0x13,0xFC,0x10,0x04},/*"檔",7*/ {0x08,0x80,0x08,0x40,0x08,0x40,0x10,0x00,0x17,0xFC,0x30,0x00,0x30,0x08,0x52,0x08, 0x92,0x08,0x11,0x10,0x11,0x10,0x11,0x10,0x11,0x20,0x10,0x20,0x1F,0xFE,0x10,0x00},/*"位",8*/ {0x00,0x00,0x23,0xF8,0x12,0x08,0x12,0x08,0x83,0xF8,0x42,0x08,0x42,0x08,0x13,0xF8, 0x10,0x00,0x27,0xFC,0xE4,0xA4,0x24,0xA4,0x24,0xA4,0x24,0xA4,0x2F,0xFE,0x00,0x00},/*"溫",9*/ {0x01,0x00,0x00,0x80,0x3F,0xFE,0x22,0x20,0x22,0x20,0x3F,0xFC,0x22,0x20,0x22,0x20, 0x23,0xE0,0x20,0x00,0x2F,0xF0,0x24,0x10,0x42,0x20,0x41,0xC0,0x86,0x30,0x38,0x0E},/*"度",10*/ {0x11,0x10,0x11,0x10,0x17,0xFC,0x11,0x10,0xFC,0x00,0x13,0xF8,0x32,0x08,0x3B,0xF8, 0x56,0x08,0x53,0xF8,0x90,0x40,0x17,0xFC,0x10,0xA0,0x11,0x10,0x12,0x08,0x14,0x06},/*"模",11*/ {0x00,0x48,0x00,0x44,0x00,0x44,0x00,0x40,0xFF,0xFE,0x00,0x40,0x00,0x40,0x3E,0x40, 0x08,0x40,0x08,0x40,0x08,0x20,0x08,0x22,0x0F,0x12,0x78,0x0A,0x20,0x06,0x00,0x02},/*"式",12*/ {0x00,0x00,0x21,0xF0,0x11,0x10,0x11,0x10,0x01,0x10,0x02,0x0E,0xF4,0x00,0x13,0xF8, 0x11,0x08,0x11,0x10,0x10,0x90,0x14,0xA0,0x18,0x40,0x10,0xA0,0x03,0x18,0x0C,0x06},/*"設",13*/ {0x02,0x00,0x01,0x00,0x7F,0xFE,0x40,0x02,0x80,0x04,0x00,0x00,0x3F,0xF8,0x01,0x00, 0x01,0x00,0x11,0x00,0x11,0xF8,0x11,0x00,0x11,0x00,0x29,0x00,0x47,0xFE,0x80,0x00},/*"定",14*/ }; uchar code SZ[][16]={ {0x00,0x00,0x00,0x18,0x24,0x42,0x42,0x42,0x42,0x42,0x42,0x42,0x24,0x18,0x00,0x00},/*"0",0*/ {0x00,0x00,0x00,0x08,0x38,0x08,0x08,0x08,0x08,0x08,0x08,0x08,0x08,0x3E,0x00,0x00},/*"1",1*/ {0x00,0x00,0x00,0x3C,0x42,0x42,0x42,0x02,0x04,0x08,0x10,0x20,0x42,0x7E,0x00,0x00},/*"2",2*/ {0x00,0x00,0x00,0x3C,0x42,0x42,0x02,0x04,0x18,0x04,0x02,0x42,0x42,0x3C,0x00,0x00},/*"3",3*/ {0x00,0x00,0x00,0x04,0x0C,0x0C,0x14,0x24,0x24,0x44,0x7F,0x04,0x04,0x1F,0x00,0x00},/*"4",4*/ {0x00,0x00,0x00,0x7E,0x40,0x40,0x40,0x78,0x44,0x02,0x02,0x42,0x44,0x38,0x00,0x00},/*"5",5*/ {0x00,0x00,0x00,0x18,0x24,0x40,0x40,0x5C,0x62,0x42,0x42,0x42,0x22,0x1C,0x00,0x00},/*"6",6*/ {0x00,0x00,0x00,0x7E,0x42,0x04,0x04,0x08,0x08,0x10,0x10,0x10,0x10,0x10,0x00,0x00},/*"7",7*/ {0x00,0x00,0x00,0x3C,0x42,0x42,0x42,0x24,0x18,0x24,0x42,0x42,0x42,0x3C,0x00,0x00},/*"8",8*/ {0x00,0x00,0x00,0x38,0x44,0x42,0x42,0x42,0x46,0x3A,0x02,0x02,0x24,0x18,0x00,0x00},/*"9",9*/ {0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},/*" ",10*/ {0x00,0x00,0x00,0x00,0x00,0x00,0x18,0x18,0x00,0x00,0x00,0x00,0x18,0x18,0x00,0x00},/*":",11*/ {0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x7E,0x00,0x00,0x00,0x00,0x00,0x00,0x00},/*"-",12*/ }; void delay(uint t) //延時函數(shù) { uint i,j; for(i=0;i480us) DQ=1; //拉高數(shù)據(jù)線 delay_18(5); //等待(15~60us) x=DQ; //用X的值來判斷初始化有沒有成功,18B20存在的話X=0,否則X=1 delay_18(20); } //讀一個字節(jié) ReadOneChar(void) //主機數(shù)據(jù)線先從高拉至低電平1us以上,再使數(shù)據(jù)線升為高電平,從而產(chǎn)生讀信號 { unsigned char i=0; //每個讀周期最短的持續(xù)時間為60us,各個讀周期之間必須有1us以上的高電平恢復期 unsigned char dat=0; for (i=8;i>0;i--) //一個字節(jié)有8位 { DQ=1; delay_18(1); DQ=0; dat>>=1; DQ=1; if(DQ) dat|=0x80; delay_18(4); } return(dat); } //寫一個字節(jié) void WriteOneChar(unsigned char dat) { unsigned char i=0; //數(shù)據(jù)線從高電平拉至低電平,產(chǎn)生寫起始信號。15us之內將所需寫的位送到數(shù)據(jù)線上, for(i=8;i>0;i--) //在15~60us之間對數(shù)據(jù)線進行采樣,如果是高電平就寫1,低寫0發(fā)生。 { DQ=0; //在開始另一個寫周期前必須有1us以上的高電平恢復期。 DQ=dat&0x01; delay_18(5); DQ=1; dat>>=1; } delay_18(4); } //讀溫度值(低位放tempL;高位放tempH;) void ReadTemperature(void) { Init_DS18B20(); //初始化 WriteOneChar(0xcc); //跳過讀序列號的操作 WriteOneChar(0x44); //啟動溫度轉換 delay_18(125); //轉換需要一點時間,延時 Init_DS18B20(); //初始化 WriteOneChar(0xcc); //跳過讀序列號的操作 WriteOneChar(0xbe); //讀溫度寄存器(頭兩個值分別為溫度的低位和高位) tempL=ReadOneChar(); //讀出溫度的低位LSB tempH=ReadOneChar(); //讀出溫度的高位MSB if(tempH>0x7f) //最高位為1時溫度是負 { tempL=~tempL; //補碼轉換,取反加一 tempH=~tempH+1; fg=0; //讀取溫度為負時fg=0 } sdata = tempL/16+tempH*16; //整數(shù)部分 xiaoshu1 = (tempL&0x0f)*10/16; //小數(shù)第一位 xiaoshu2 = (tempL&0x0f)*100/16%10; //小數(shù)第二位 xiaoshu=xiaoshu1*10+xiaoshu2; //小數(shù)兩位 } void KEY_scan() { if(KEY1 == 0) { delay(20); if(KEY1 == 0) { while(KEY1 == 0); Set_temp++; } } if(KEY2 == 0) { delay(20); if(KEY2 == 0) { while(KEY2 == 0); Set_temp--; } } if(KEY3 == 0) { delay(20); if(KEY3 == 0) { while(KEY3 == 0); if(Set_mode != 3) { Set_mode++; }else { Set_mode = 0; } } } if(KEY4 == 0) { delay(20); if(KEY4 == 0) { while(KEY4 == 0); if(Set_power != 3) { Set_power++; }else { Set_power = 0; } } } if(KEY5 == 0) { delay(20); if(KEY5 == 0) { while(KEY5 == 0); if(flag==0) { Min++; } } } if(KEY6 == 0) { delay(20); if(KEY6 == 0) { while(KEY6 == 0); if(flag == 0) { Min--; } } } if(KEY7 == 0) { delay(20); if(KEY7 == 0) { while(KEY7 == 0); if(flag==0) { flag=1; MOT = 1; }else { flag = 0; MOT = 0; LED = 0; Sec = 0; Min = 20; } } } } void main() { TMOD |= 0x01; //開啟定時器0 0x10時使用定時器1 0x11時啟動兩個 TH0=0XFC; //給定時器賦初值,定時1ms TH1 TL0=0X18; //TL1 EA=1; //總中斷打開 ET0=1; //定時器0中斷打開 ET1 TR0=1; //定時器0開關打開 TR1 init(); Init_DS18B20(); display_HZ(0,0,HZ0[0]); display_HZ(0,1,HZ0[1]); display_HZ(0,2,HZ0[2]); display_HZ(0,3,HZ0[3]); display_HZ(1,0,HZ0[5]); display_HZ(1,1,HZ0[6]); display_HZ(1,2,HZ0[9]); display_HZ(1,3,HZ0[10]); display_SZ(1,8,SZ[11]); display_SZ(1,11,SZ[12]); display_HZ(2,0,HZ0[5]); display_HZ(2,1,HZ0[6]); display_HZ(2,2,HZ0[11]); display_HZ(2,3,HZ0[12]); display_SZ(2,8,SZ[11]); display_HZ(3,0,HZ0[5]); display_HZ(3,1,HZ0[6]); display_HZ(3,2,HZ0[7]); display_HZ(3,3,HZ0[8]); display_SZ(3,8,SZ[11]); display_SZ(0,13,SZ[11]); LED = 0; MOT = 0; BEEP = 1; while(1) { delay_ms(10); ReadTemperature(); delay_ms(10); display_SZ(1,9,SZ[sdata/10]); display_SZ(1,10,SZ[sdata%10]); display_SZ(1,12,SZ[Set_temp/10]); display_SZ(1,13,SZ[Set_temp%10]); display_SZ(2,9,SZ[Set_mode]); display_SZ(3,9,SZ[Set_power]); display_SZ(2,9,SZ[Set_mode]); display_SZ(3,9,SZ[Set_power]); display_SZ(0,11,SZ[Min/10]); display_SZ(0,12,SZ[Min%10]); display_SZ(0,14,SZ[Sec/10]); display_SZ(0,15,SZ[Sec%10]); KEY_scan(); if(sdata < Set_temp && flag == 1) { LED = 1; }else if(sdata > Set_temp && flag == 1) { LED = 0; } } } void Timer0() interrupt 1 //參考上圖 定時器1時為3 { static uint i; //定義一個自變形變量 TH0=0XFC; //給定時器賦初值,定時1ms TH1 TL0=0X18; //TL1 i++; if(i==1000) { i=0; if(flag == 1) { if(Sec != 0 && Min != 0) { Sec--; }else if(Sec == 0 && Min != 0) { Sec = 59; Min--; }else if(Sec == 0 && Min == 0) { flag = 0; BEEP = 0; MOT = 0; } } } }
-
OLED
+關注
關注
119文章
6180瀏覽量
223822 -
Proteus
+關注
關注
79文章
1692瀏覽量
106370 -
按摩儀
+關注
關注
0文章
11瀏覽量
169
發(fā)布評論請先 登錄
相關推薦
多功能按摩椅使用SLH89F5162設計
泰浩微藍牙方案|頸部按摩儀方案開發(fā)
開啟節(jié)奏按摩先潮,機械師音樂頸部按摩儀
NV080D語音芯片在頸部按摩器上的應用
頸椎按摩儀方案的開發(fā)原理及功能
NV080D語音芯片,幫助頸部按摩儀實現(xiàn)語音提示功能
頸部按摩儀語音提示ic,擋位真人語音播報提示IC芯片,唯創(chuàng)WT588F
頸部按摩儀語音控制新方案,NV040DS語音芯片,IO口豐富

緩解你的頸部疲勞——沐渥智能頸椎按摩儀
頸部按摩儀語音提示ic,擋位真人語音播報提示IC芯片,唯創(chuàng)WT588F

頸部按摩器語音播報IC方案 高性價比 WTN6語音芯片

2.4G芯片做遙控頸部按摩器方案
分立器件產(chǎn)品在頸部按摩儀產(chǎn)品上的應用案例分享






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論