 RA6快速設計指南 [6] 復位要求和復位電路 (上)
RA6快速設計指南 [6] 復位要求和復位電路 (上)
6
復位要求和復位電路
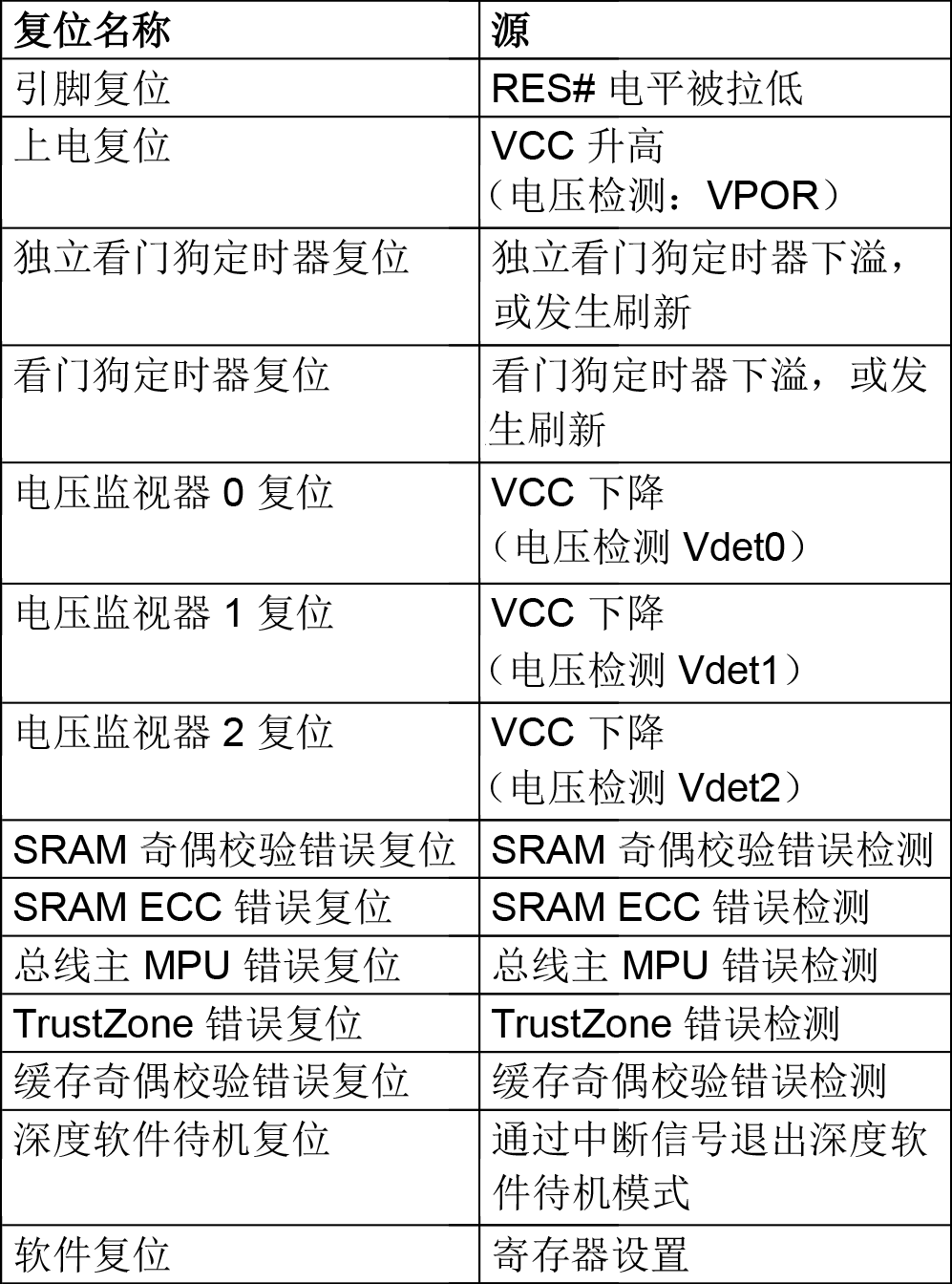
共有十四種類型的復位。這些復位在Arm Cortex-M4器件和Arm Cortex-M33器件之間略有不同。
表11. Arm Cortex-M4器件復位
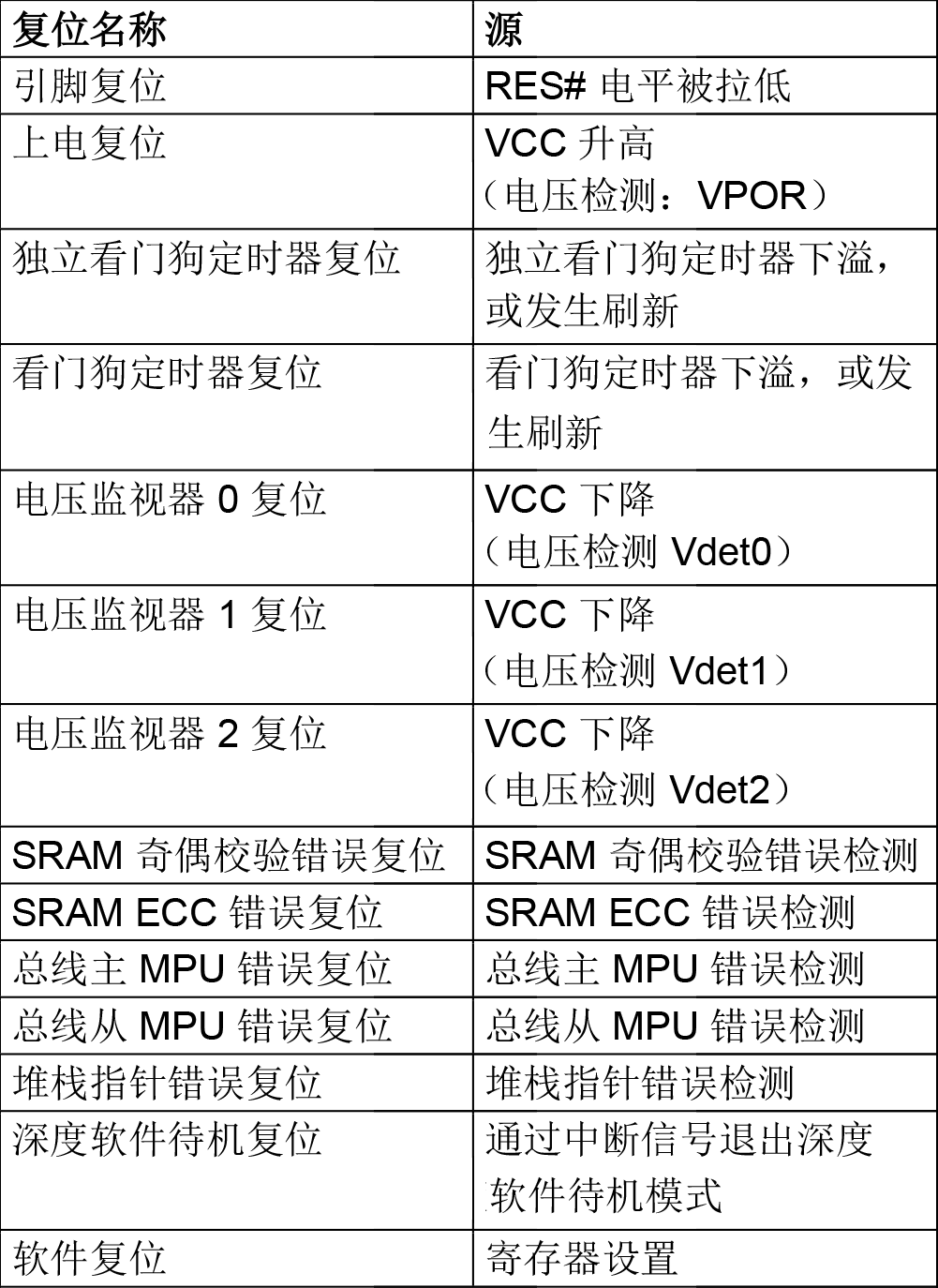
表12. Arm Cortex-M33器件復位
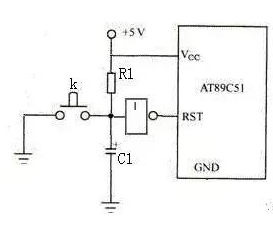
6.1 引腳復位
當RES#引腳電平被拉低時,所有處理都將中止,MCU進入復位狀態。要在運行中復位MCU,應在指定的復位脈沖寬度內將RES#保持為低電平。有關時序要求的更詳細信息,請參見《硬件用戶手冊》中“電氣特性”一章的“復位時序”部分。另請參見本系列文章的第2節“仿真器支持”,了解與調試支持相關的復位電路的詳細信息。
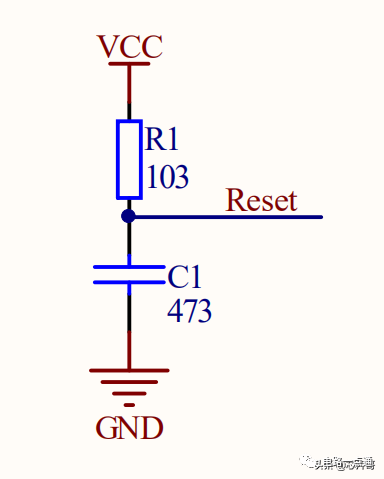
無需在RES#線路上使用外部電容,因為POR電路在內部將其保持為低電平以實現良好的復位,并且需要最小的復位脈沖來啟動此過程。
6.2 上電復位
有兩種情況會產生上電復位 (POR):
1
如果RES#引腳在接通電源后處于高電平狀態。
2
如果RES#引腳在VCC低于VPOR時處于高電平狀態。
在VCC超過上電復位電壓 (VPOR) 并經過上電復位時間 (tPOR) 之后,芯片將從上電復位狀態釋放。上電復位時間是允許外部電源和MCU達到穩定狀態的時間。有關電壓大小和時序的詳細信息,請參見《硬件用戶手冊》中“電氣特性”一章的“POR和LVD特性”部分。
由于POR電路依賴于RES#與VCC同時為高電平,因此請勿在復位引腳上放置電容。這將減慢RES#相對于VCC的上升時間,從而妨礙POR電路正確識別上電條件。
當電源 (VCC) 降至不超過VPOR時,如果RES#引腳為高電平,則會產生上電復位。在VCC上升到VPOR以上并且經過tPOR之后,芯片將從上電狀態釋放。
上電復位后,RSTSR0中的PORF位置1。引腳復位后,PORF清零。
這是由獨立看門狗定時器 (IWDT) 產生的內部復位。
當IWDT下溢時,可以選擇產生獨立看門狗定時器復位(可以改為產生NMI),并且RSTSR1中的IWDTRF位置1。短暫延遲(通常為320μs)后,將退出IWDT復位。
6.4 看門狗定時器復位
這是看門狗定時器 (WDT) 產生的內部復位。
當WDT下溢時,可以選擇產生看門狗定時器復位(可以改為產生NMI),并且RSTSR1中的WDTRF位置1。短暫延遲(通常為320μs)后,將退出WDT復位。
-
mcu
+關注
關注
146文章
16988瀏覽量
350304 -
瑞薩
+關注
關注
35文章
22291瀏覽量
86067
原文標題:RA6快速設計指南 [6] 復位要求和復位電路 (上)
文章出處:【微信號:瑞薩MCU小百科,微信公眾號:瑞薩MCU小百科】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
復位電路的設計問題

復位電路的三種方式 復位電路的原理和作用
復位電路的電容多大的 復位電路設計類型有哪幾種
復位電路靜電整改案例分享(一)——交換機復位電路

復位電路介紹 復位電路的原理及作用
STM32復位電路用復位芯片和阻容復位電路區別
CK-RA6M5上的RA AWS云連接,帶蜂窩網絡-入門指南

復位電路的基本功能介紹

復位電路的復位條件和復位過程
積分型上電復位電路解析
CK-RA6M5上的RA AWS云連接(帶以太網)入門指南





 工商網監
工商網監
評論