 可部署型10BASE-T1L單對以太網狀態監測振動傳感器設計
可部署型10BASE-T1L單對以太網狀態監測振動傳感器設計
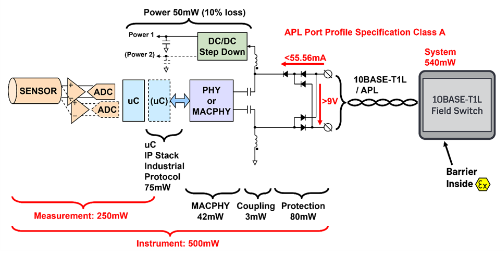
對于狀態監測(CbM)傳感器開發,單對以太網(SPE)或10BASE-T1L比標準以太網更具顯著優勢,包括縮小傳感器尺寸、降低復雜性和低成本布線選項。本文將討論如何為CbM傳感器設計一款小巧的共享電源和數據接口(PoDL)。本文還將討論完整傳感器解決方案的電源設計、機械設計、MEMS傳感器選型以及軟件設計。
簡介
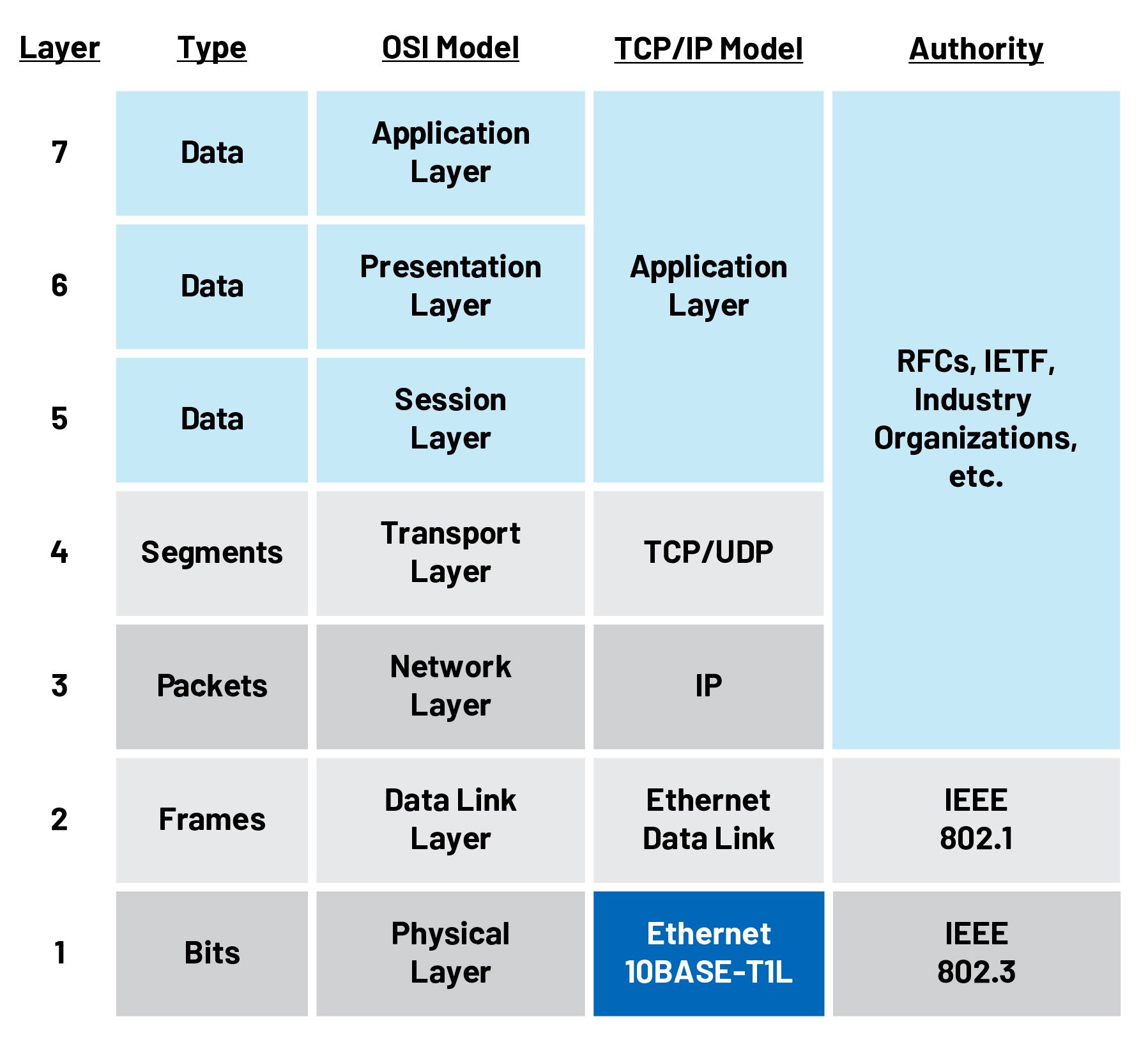
由IEEE制定的新型單對以太網(SPE)或10BASE-T1L物理層標準,為傳輸設備運行狀況信息實施狀態監測(CbM)應用提供了新的連接解決方案。SPE提供共享電源和高帶寬數據架構,可通過低成本雙線電纜在超過1000米的距離實現10 Mbps數據和電源的共享。
ADI公司設計了業界首款10BASE-T1L MAC-PHY(ADIN1110),這是一款集成MAC的單對以太網收發器。ADIN1110使用簡單的SPI總線與嵌入式微控制器通信,從而可降低傳感器的功耗并減少固件開發時間。
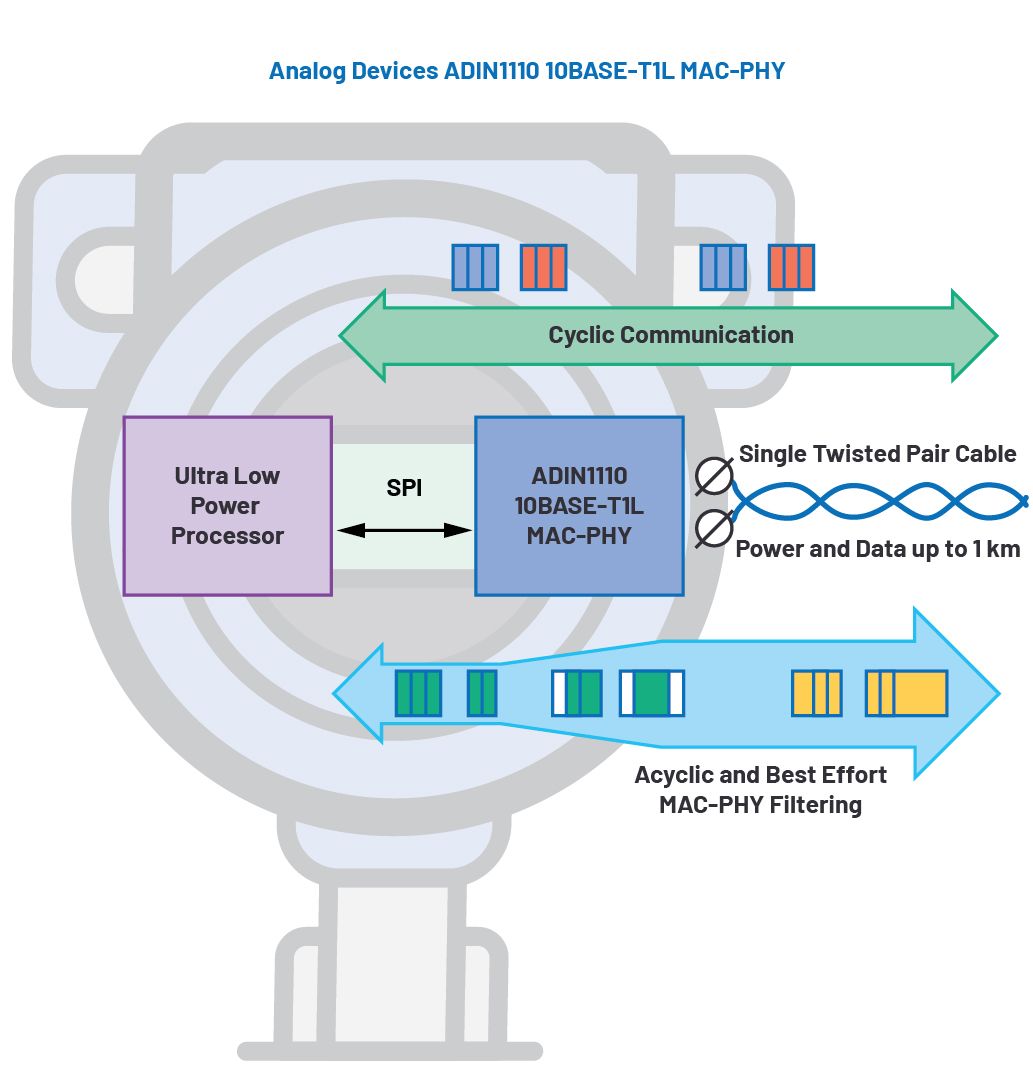
在本文中,您將了解如何設計一款體型小巧但功能強大的傳感器,如圖1所示。本文將介紹:
如何設計小型共享數據和電源通信接口
如何為傳感器設計超低噪聲電源
微控制器和軟件架構選擇
選擇合適的MEMS振動傳感器
集成數字硬件設計和機械外殼
電腦上的數據采集UI示例

圖1. 10BASE-T1L單對以太網狀態監測(振動)傳感器原型。
如何設計小型共享數據和電源通信接口
什么是PoDL?
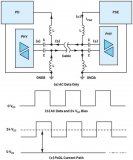
電源和數據通過電感電容網絡分布在單對雙絞線上,具體如圖2所示。高頻數據通過串聯電容與數據線路耦合,同時保護ADIN1100 10BASE-T1L PHY免受直流母線電壓影響,如圖2(a)所示。圖2所示為通過連接至數據線路的耦合電感連接到PSE(供電設備)控制器的電源。如圖2(b)所示,24 VDC電源對交流數據總線實施偏置。在圖2(c)中,PSE和PD(受電器件)之間的電流路徑顯示為IPWR,使用CbM傳感器節點上的耦合電感從線路中提取電源。
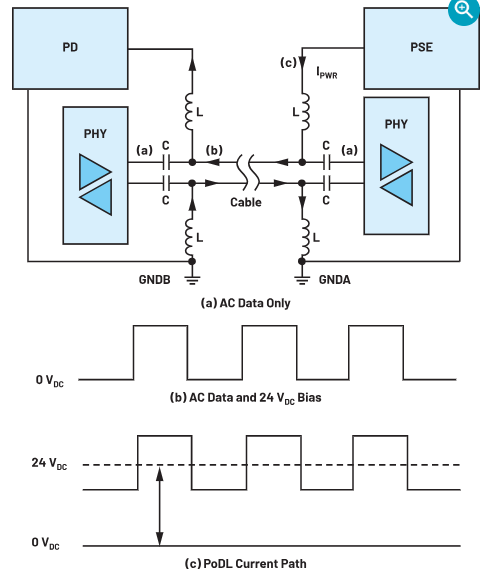
圖2. 共享電源和數據線(PoDL)的基本原理。
如何設計小型PoDL電路?
圖2中包含耦合電感和串聯電容,這些是PoDL工作所需的基本元件。此外,還需使用其他元件以確保魯棒性和容錯性。
由于PoDL耦合電感屬于非理想元件,因此會發生一定程度的差模至共模轉換。這種共模噪聲會降低信號質量。將共模扼流圈連接到靠近電纜連接器的位置有助于減輕這種非理想特性,并保護設計免受電纜共模噪聲的影響。還需要檢查共模扼流圈載流量和DCR,確保其能夠為傳感器提供足夠的功率。
為防止極性電纜安裝錯誤(例如,將PSE PHY的24 VDC錯接到PD PHY的0 VDC),建議使用橋式整流二極管。為了確保EMC魯棒性,需使用工作電壓大于24 VDC的TVS二極管。如果傳感器硬件設計體積較大,還可以使用其他EMC元件(例如,在信號線上配置高壓電容)。
使用所有這些元件設計小型PoDL電路可能并不那么簡單,但幸運的是,大多數供應商都針對整流二極管、TVS二極管和無源元件提供具有尺寸優勢的解決方案。通常,必須選擇具有超低電容的元件,盡可能地減少信號失真。建議耦合電感和電容分別為220 μH和220 nF,但在仿真或測試中可以采用更大的值以留出設計裕量。表1列出了可用于傳感器設計的一系列小尺寸元件。
| 元件 | 產品型號 | 備注 |
| 共模扼流圈 | Würth 744242471 | 470 μH |
| TVS | Bourns CDSOD323-T36SC | |
| 耦合電感 (功率型) | Coilcraft LPD5030-224MRB | 220 μH |
| 橋式整流二極管 | Bourns CD-HD2006L | |
| 串聯電容 | Taiyo Yuden HMK107C7224KAHTE | E 220 nF |
耦合電感的額定電流需要滿足或超過遠程供電MEMS傳感器節點的總電流要求。LPD5030-224MRB的額定電流至少為240 mA,大大超過了10BASE-T1L傳感器節點的要求。由于額定電流要求相對較低,因此可以減小電感尺寸。表2顯示,4.8 mm × 4.8 mm LPD5030-224MRB是滿足10BASE-T1L鏈路要求的最小元件。
| 參數 | 對電感封裝尺寸的影響 | LPD5030-224MRB值 | 備注 |
| 足夠高的電感 | 電感值越高,內部繞組越多,封裝尺寸越大。 | 220 μH ±20% | 建議的PoDL電感。 |
| 更高的SRF (自諧振頻率) | SRF越高,內部繞組越少,封裝尺寸越小。 | 5.53 MHz |
高于10BASE-T1L鏈路上的最高數據速率10 Mbps。 |
| 更高的額定和飽和電流 | 內部繞組更少,但封裝尺寸更大。 | 0.24 A, 0.31 A | 超過10BASE-T1L MEMS傳感器要求。 |
| 低DCR | 要實現更低的DCR,電纜需要更粗,且減少繞組。 | 3.3 Ω |
很難通過較粗的繞組實現較小的封裝。 |
如何檢查PoDL電路是否能夠正常工作?
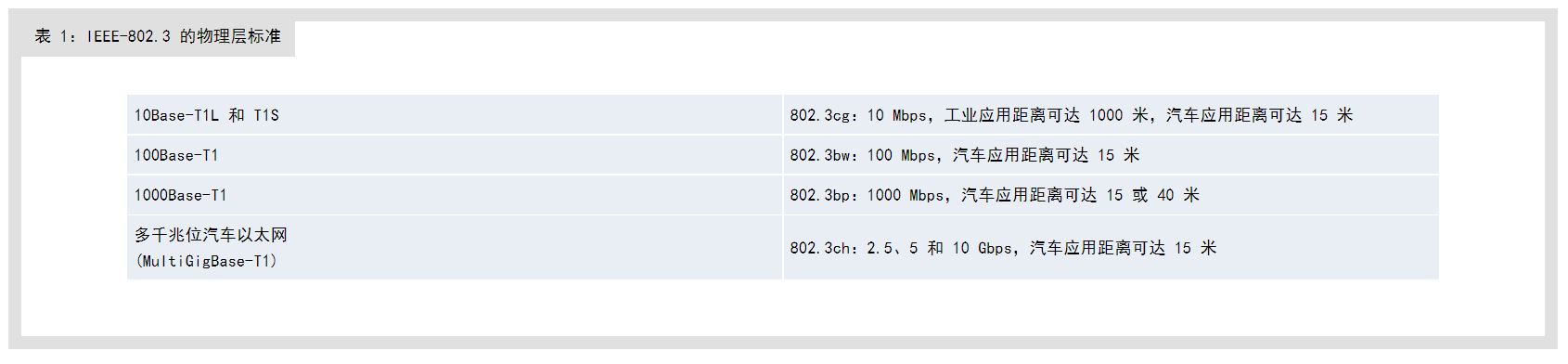
用于10BASE-T1L的IEEE 802.3cg-2019標準中概述了PHY要滿足的電氣規格,包括電壓電平、時序抖動、功率譜密度、回波損耗和信號下降(衰減)。PoDL電路會對通信通道產生影響,其中回波損耗和信號衰減(或下降)是兩個重要因素。
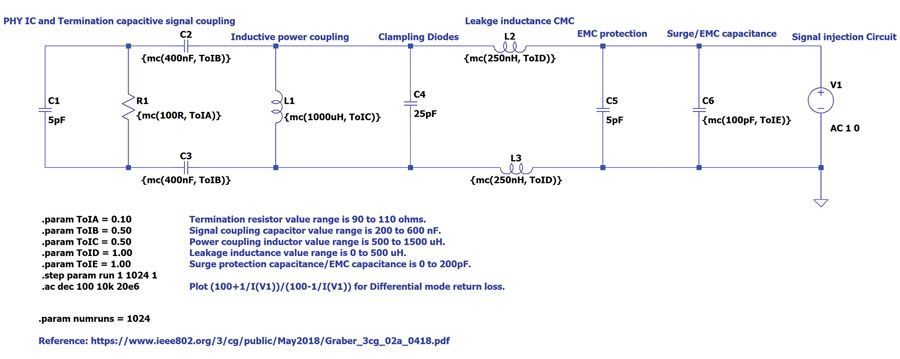
回波損耗可以衡量網絡上因電纜鏈路各處阻抗不匹配而產生的信號反射。回波損耗以分貝為單位,對于10BASE-T1L中采用的高數據速率或長電纜距離(1700 m)通信尤為重要。圖3(基于Graber1的工作)顯示了單對以太網(SPE) 10BASE-T1L標準(10SPE)物理層或MDI的LTspice?仿真電路。該仿真電路針對ADI公司的ADIN1110或ADIN1100 10BASE-T1L以太網PHY/MAC-PHY采用100 Ω ±10%端接電阻。信號耦合電容、功率耦合電感、共模扼流圈和其他EMC保護元件均進行建模仿真。功率耦合電感標稱值為1000 μH,相當于兩個220 μH的雙繞組電感(880 μH加上裕量)。對于某些元件,使用LTspice蒙特卡羅語法添加建議的元件值和容差范圍。圖4顯示了相應的蒙特卡羅仿真波形和使用LTspice添加的限值線。所選元件和容差將滿足回波損耗掩模規格。
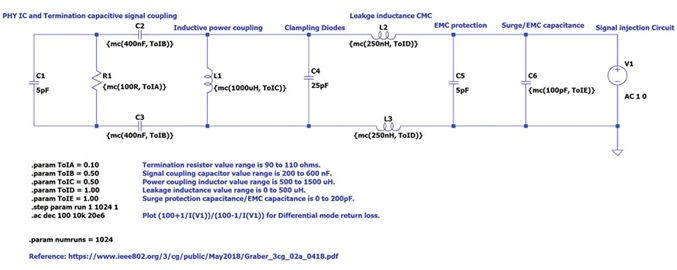
圖3. 使用LTspice蒙特卡羅函數進行的MDI回波損耗仿真。
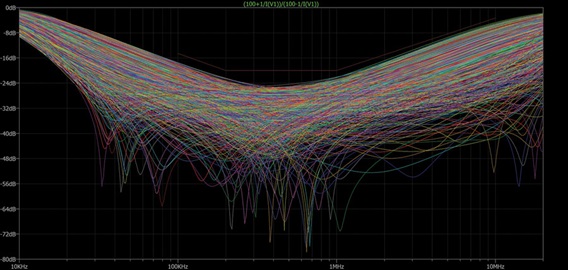
圖4. 蒙特卡羅仿真波形。
如何設計超低噪聲電源
有線狀態監測傳感器具有嚴格的抗擾度要求。對于鐵路、自動化和重工業(例如紙漿和紙張加工)的狀態監測,振動傳感器解決方案需要輸出低于1 mV的噪聲,以避免在數據采集/控制器處觸發錯誤的振動水平。這意味著電源設計向測量電路(MEMS信號鏈)輸出的噪聲必須非常低(低輸出紋波)。MEMS傳感器的電源設計還必須具備抗干擾能力,不受共享電源和數據線上耦合噪聲的影響(高PSRR)。
要確保MEMS傳感器能夠檢測到極小的振動,需要使用極低噪聲電源。 ADXL1002 MEMS加速度計的輸出電壓噪聲密度規格為25 μg√Hz。在正常工作期間,MEMS電源需要滿足或超過此規格,以避免降低傳感器的性能。
有線CbM傳感器通常由24 VDC至30 VDC電源供電,需使用具有高輸入范圍和高效率的降壓轉換器,以盡可能地降低功耗并提升傳感器的長期可靠性。由于具有非理想容性負載,降壓轉換器的電壓紋波可能有幾十毫伏,不適合為3 V/5 V MEMS傳感器供電。使用共模扼流圈或大容量電容可以減小降壓輸出紋波電壓。但在降壓輸出端需要使用一個超低噪聲LDO穩壓器,以確保為MEMS傳感器提供只有微伏級噪聲的電源。
為10BASE-T1L傳感器原型供電
圖5顯示了數字有線MEMS傳感器的一種電源設計。其中的LT8618專為工業傳感器設計,具有以下特性:
寬輸入范圍高達60 V
低輸出電流100 mA
效率高達90%
微型2 mm × 2 mm LQFN封裝
圖5顯示LT8618具有24 VDC輸入,可調節至3.7 V后輸入 LT3042,從而為MEMS傳感器電路提供3.3 V電源。
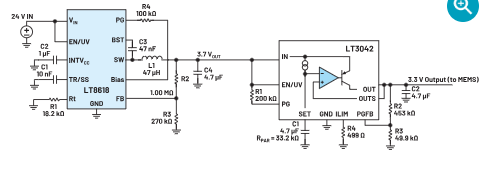
圖5. 數字有線MEMS傳感器的電源設計。
LT3042是一款高性能、超低噪聲LDO穩壓器,具有以下特性:
0.8 μV rms時提供超低有效值噪聲(10 Hz至100 kHz)
超高PSRR(1 MHz時為79 dB)
微型3 mm × 3 mm DFN封裝
“如何使用LTspice獲得出色的EMC仿真結果 - 第1部分” 2 一文詳細介紹了LTspice仿真電路,并討論了LT8618和LT3042的EMC性能。此文中的圖19和圖20顯示了在LT3042輸入端施加EMC干擾時的仿真結果。結果表明,即使LT3042的輸入端存在1 V p-p EMC干擾,其電壓紋波也小于200 μV。
集成數字硬件設計和機械外殼
MEMS振動傳感器的封裝采用鋼材或鋁材外殼,能夠牢固連接在受監控設備上,并提供防水和防塵性能(IP67)。對于振動傳感器,外殼的固有頻率必須大于由MEMS傳感器測量的所施加振動負載的固有頻率。
ADXL1002 MEMS的頻率響應曲線如圖6所示。ADXL1002的3 dB帶寬為11 kHz,諧振頻率為21 kHz。用于封裝ADXL1002的保護外殼在靈敏度軸上需要具有21 kHz或更高的一階固有頻率。同樣,在設計三軸傳感器時,需在垂直方向和徑向分析機械外殼的固有頻率。
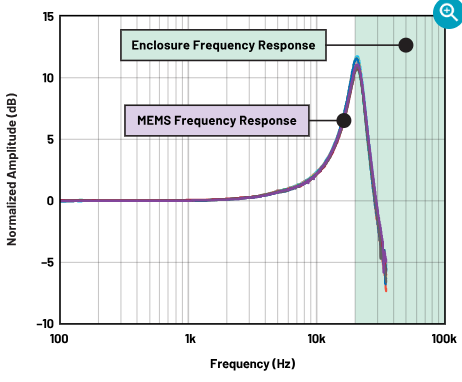
圖6. MEMS和機械外殼頻率響應的設計目標。
在模態激振器上對傳感器原型進行測試,該模態激振器提供了一個受控環境,可設置振動試驗電壓和掃描頻率。傳感器頻率響應的測試結果應與圖6所示的MEMS傳感器信息相吻合。
模態分析
模態分析是一種便于我們充分了解外殼振動特性的常用技術。模態分析可以提供設計的固有頻率和正常模式(相對變形)。對結構的模態響應進行仿真可使用基于ANSYS或類似程序的有限元方法(FEM),這樣有助于優化設計和減少傳感器原型制作的迭代次數。
方程1是單自由度系統模態分析控制方程的簡化形式。固有頻率與外殼設計的質量矩陣(M)和剛度矩陣(K)有關。方程1提供了一種簡單、直觀的設計評估方法。如果降低傳感器外殼的高度,剛度增大,質量減小,因此,固有頻率提高。此外,如果增加外殼的高度,剛度減小,質量增大,固有頻率隨之降低。

大多數設計都具有多個自由度。有些設計具有數百自由度。利用有限元方法可以快速得出方程1的計算結果,如果采用手動計算則非常耗費時間。
當使用ANSYS模態進行仿真時,固有頻率和模式參與因子(MPF)均由求解器輸出。MPF用于確定哪些固有頻率對于您的設計最為重要。如果MPF相對較高,則意味著設計中可能存在某個特定頻率的問題。表3中的示例表明,在仿真中預測到x軸的固有頻率為500 Hz時,模式為弱激勵,不太可能成為問題。在外殼x軸激勵800 Hz強模式時,如果MEMS敏感軸的方向和外殼x軸的方向一致,這將是個問題。但是,如果設計人員將MEMS傳感器PCB的方向定位在外殼的z軸上測量,那么這個x軸的800 Hz強模式可能無關緊要。
| 模式 | Freq, Hz | 軸 | MPF |
MPF注釋 |
| 1 | 500 | x | 0.001 | 弱模式 |
| 2 | 800 | x | 0.45 |
強模式 |
| 3 | 1500 | y | 0.6 | 強模式 |
| 4 | 3000 | y | 0.002 | 弱模式 |
| 5 | 10,000 | z | 0.33 | 強模式 |
10BASE-T1L傳感器原型的模態分析
“如何利用模態分析設計出色的振動傳感器外殼” 3 一文中詳細概述了模態分析。ANSYS作為一種先進高效的工具,可用于分析結構的模態響應,此外了解基礎方程將有助于設計。基礎方程表明,外殼固有頻率會受到材料選擇和幾何形狀的影響。與矩形相比,圓柱形的橫截面積更大,其設計更有助于在所有軸上實現更高的剛度和固有頻率。與圓柱形相比,矩形提供更多的傳感器安裝方向和設備連接選項。相關示例和仿真結果請參閱此文。
10BASE-T1L傳感器原型采用帶寬為1 kHz的三軸MEMS傳感器(ADXL357),其設計目標是構建一款支持1 kHz以上帶寬的外殼。首先構建了一個矩形外殼設計(如圖7所示),然后使用ANSYS進行仿真。表4顯示了仿真結果,其中固有頻率和模式參與因子表明所有三個軸上的帶寬至少為6 kHz。該設計在x軸表面末端使用M6凸耳。使用這些連接點將確保牢固的設備連接和出色的模態性能。
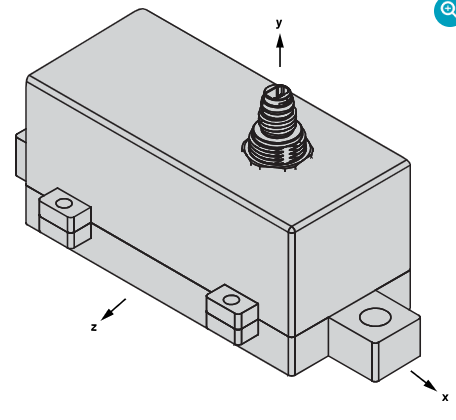
圖7. ADXL357三軸MEMS傳感器和ADIN1110 10BASE-T1L MAC-PHY電路的外殼。
| 模式 | Freq, Hz | 軸 | MPF |
| 1 | 11663 | x | 6080 |
| 2 | 6632 | y |
0.057 |
| 3 | 30,727 | y | 0.187 |
| 4 | 6080 | z |
0.370 |
選擇合適的MEMS振動傳感器
選擇加速度計時,我們需要注意哪些規格?
雖然目前沒有任何官方標準可用于振動傳感器的分類,但可以通過這些傳感器的有效分辨率劃分其類別,如圖8所示。很明顯,MEMS加速度計的覆蓋區域比壓電傳感器更小。MEMS加速度計適用于許多特定應用領域,例如安全氣囊碰撞檢測、車輛傾翻檢測、機械臂定位、平臺穩定、精確傾斜檢測等等。MEMS制造商在幾年前才開發出足以與IEPE振動傳感器抗衡的傳感器,因此該技術仍處于起步階段,有線狀態監測(CbM)裝置的覆蓋范圍較小,如圖8左側所示。然而,隨著越來越多的MEMS供應商投資開發狀態監測振動傳感器解決方案,預計未來幾年覆蓋范圍會有所擴增。
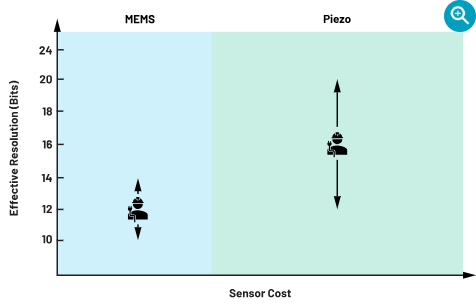
圖8. 適合有線應用的MEMS和壓電傳感器系列
MEMS傳感器的很多優勢逐漸在振動傳感器領域產生重大影響。例如,市場上絕大多數MEMS傳感器都具有以下特點:三軸、集成ADC、數字濾波、出色的線性度、低成本和低重量,并且尺寸小于壓電傳感器或IEPE/ICP傳感器,如表5所示。雖然對于非常關鍵的設備仍會繼續使用IEPE傳感器,但維護和設施管理人員也在尋求從非關鍵設備中獲取更深入的見解,以提高生產力、效率和可持續性,盡可能地減少計劃外停機時間并延長設備的使用壽命。在這種情況下,將會使用成本和性能較低的傳感器(無論是MEMS還是IEPE),這就產生了一個問題:具有出色的噪聲和帶寬性能的單軸IEPE傳感器與三軸MEMS傳感器相比,前者是否始終是更好的選擇?
| ADXL357 | ADXL1002 | Piezo傳感器(603C01) | |
| 尺寸(mm) | 6 × 5.6 × 2.2 | 5 × 5 × 1.8 | 18 × 42.2 |
| 集成ADC | 是 | 否 | 否 |
|
軸數 |
3 | 1 | 1 |
| 電源電壓(V) | 2.25 至 3.6 | 3.3 至 5.25 |
18 至 28 |
| 接口 | SPI | 模擬 | 模擬 |
| 重量(g) | <0.2 | <0.2 | 51 |
| 噪聲 (μg/√Hz) | 80 | 25 | 350 |
| 寬帶 (kHz) | 1 | 11 | 10 |
| 電流消耗 | 200 μA | 1 mA | 2 mA 至 20 mA |
三軸MEMS傳感器與IEPE振動傳感器相比如何?
測試人員對三軸MEMS加速度計以絕對可信度識別特定故障的效果進行了大量測試,通常性能更高的單軸或雙軸IEPE振動傳感器無法檢測到這些特定故障,測試結果如表6所示。1除非在安裝前采取某些措施了解特定異常,否則單軸振動傳感器無法絕對肯定地檢測到軸彎曲、偏心轉子、軸承問題和轉子翹起等故障。當只有單軸振動傳感器可用時,可能需要使用其他CbM傳感器(例如電機電流或磁場傳感器)來更可靠地識別某些故障。
在具有出色噪聲和帶寬性能的單軸傳感器與三軸傳感之間需要權衡取舍,這些額外的軸可以緩解安裝位置的難題,因為可以全面檢測到垂直、水平和軸向振動,并提供設備運作情況的深入洞察。根據表6中所示的結果,雖然單軸傳感器與三軸MEMS傳感器相比具有更出色的噪聲和帶寬性能,但如果不重定向和重新測試,也無法可靠地識別大多數故障。
| 故障 | 頻譜特征 | 可通過單軸檢測 | 注釋 | ||
| 可通過z軸(垂直)檢測 | 可通過y軸(水平)檢測 | 可通過x軸(軸向)檢測 | 可通過單軸可靠檢測 | ||
| 失衡負載 |
基頻 (1×) |
基頻 (1×) | 9×, 10× | 是 | 額外軸為測量提供更高可信度 |
| 偏心轉子 | 基頻 (1×) | 3× | 否 | 軸向特征可清晰指示轉子偏心度 | |
|
轉子翹起 |
基頻 (1×) | 3×, 4×, 5×, 6×, 7×, 8×, 9×, 10× | 否 | 高諧波下的軸向特征可清晰識別轉子翹起 | |
| 彎曲的軸 | 基頻 (1×) | 基頻 (1×) | 3× | 成為可能 |
軸向特征可清晰指示軸彎曲 |
| BPFO | 3× (BPFO)、 4× | 3× (BPFO)、 4× | 是 | x軸上進行單軸測量會漏掉此故障 | |
| BPFI | 基頻 (1×) | 5× (BPFI) | 否 | 在x軸或z軸上進行測量會漏掉此故障 | |
市場上還有哪些其它振動傳感器產品?它們的比較情況如何?
那么,三軸MEMS傳感器如何適應振動傳感器的頻譜呢?圖9顯示了目前市場上的MEMS振動傳感器(基于噪聲與帶寬)概況。其中標出IEPE傳感器以供參考,并且突出顯示MEMS傳感器在振動傳感器頻譜中的確切位置。很明顯,不同類型的MEMS傳感器自然會形成集群,我們可以利用其來分配潛在的用例。例如,將成本最低的傳感器(MEMS三軸)用于關鍵度較低的設備,而將成本最高的傳感器(IEPE)用于關鍵度最高的設備。單軸IEPE傳感器已投入使用了幾十年,涵蓋從低到高的所有關鍵應用,并且在成本和性能方面都廣為大眾接受,如圖9所示。很容易看出,三軸IEPE傳感器具有與三軸MEMS傳感器相似的性能,但其成本卻高得多。對于低關鍵度設備集群,使用成本高昂的三軸IEPE傳感器不太可行,而這進一步體現了一點:三軸MEMS傳感器在噪聲和帶寬性能方面可與某些三軸IEPE傳感器媲美。
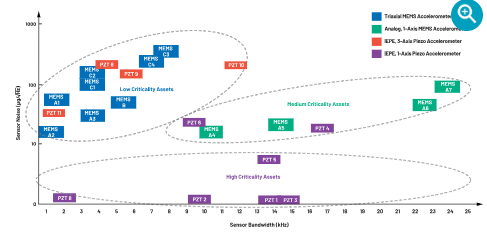
圖9. 振動傳感器分為三軸MEMS和IEPE以及單軸MEMS和IEPE進行比較。
哪種傳感器最適合可部署單對以太網狀態監測傳感器?為什么?
可部署的單對以太網狀態監測傳感器起初是為了容納振動傳感器而設計,但系統架構允許使用多種類型(如溫度、壓力、聲音、位置等)的傳感器,無論是模擬輸出還是數字輸出,只需對微控制器固件進行少量更改。振動傳感器必須采用具有高集成度(放大器、ADC)的小型數字輸出(SPI或I2C)傳感器,以滿足可部署單對以太網狀態監測傳感器的尺寸和性能要求。根據表5所示的規格選擇了一款三軸數字輸出MEMS加速度計。
用低噪聲三軸傳感器代替噪聲更低、帶寬更寬的單軸MEMS傳感器,可以提供更多診斷見解(三軸與單軸)并緩解單軸傳感器帶來的安裝難題。下一個關鍵考慮因素是功耗。ADXL357在IP6x模塊內部產生的自熱效應明顯小于其他傳感器,因為 ADXL357 不需要ADC或運算放大器,從而也可減小整體解決方案的尺寸并降低BOM成本。小尺寸解決方案利于打造小巧的機械外殼并確保出色的模態頻率性能,如模態分析部分所述。
具有更高性能的寬帶寬(11 kHz至23 kHz)單軸MEMS傳感器(例如分辨率高達14位的ADXL100x系列)支持無縫集成,但可能需使用外部ADC來保持性能,因為大多數低功耗微控制器僅集成12位ADC。然而,如果使用合適的微控制器通過過采樣和抽取技術將分辨率提高到12位以上,也可以將單軸模擬輸出MEMS加速度計輕松集成到現有系統中。請注意,如果所需的分辨率高于13位,則必須使用模擬輸出MEMS或IEPE傳感器,如表7所示。
| 傳感器 | 范圍 (±g) | 輸出范圍峰峰值 (V) | 通道數 | 線性度 (±%FSR) | NSD (μg/√Hz) | 1/f 轉折頻率 (Hz) | 平坦帶寬 (kHz) | 平坦帶寬下的噪聲 (μg rms) | 平坦帶寬時的 (dB) | 平坦帶寬時的 BW |
諧振頻率 (kHz) |
| ADXL1002 |
50 |
4 | 1 | 0.1 | 25 | 0.1 | 11 | 2622.02 | 82.60 | 13.43 |
21 |
| ADXL1004 | 500 | 4 | 1 | 0.25 | 125 | 0.1 | 24 | 19364.92 | 85.23 | 13.87 | 45 |
|
ADXL356B |
40 | 1.6 | 3 | ;0.1 | 110 | 0.1 | 1 | 3478.51 | 78.20 | 12.70 | 5.5 |
| PCB 621B40 | 500 | 10 | 1 | 1 | 10 | 1000 | 30 | 1732.05 | 104.95 | 17.14 |
85 |
| PCB 352C04 | 500 | 10 | 1 | 1 | 4 | 400 | 10 | 400.00 | 118.93 | 19.46 | 50 |
| PCB 333B52 | 5 | 10 | 1 | 1 | 0.4 | 1000 | 3 | 21.91 | 98.50 | 16.07 | 20 |
微控制器和軟件架構選擇
圖10顯示了一個簡單的基于振動傳感器的MQTT架構,圖11顯示了可部署單對以太網狀態監測傳感器連接到個人電腦或樹莓派的簡化方框圖。MQTT(消息隊列遙測傳輸)是用于物聯網的輕型消息傳輸協議,允許網絡客戶端在低帶寬環境中分發遙測數據。將MQTT歸為輕型的原因是其消息的代碼占用空間很小。這種發布與訂閱消息傳輸模式非常適合以較小代碼占用量和網絡帶寬連接遠程設備。MQTT廣泛用于石油和天然氣、汽車、電信和制造業等眾多行業領域。發布者發送消息,訂閱者接收其關注的消息。代理將消息從發布者傳遞給訂閱者。某些MQTT代理能夠處理數百萬個同時連接的MQTT客戶端,利用這一點,許多傳感器可以連接到一個SPE設備,從而創建一個傳感器數據管道,如圖10所示。發布者和訂閱者都是MQTT客戶端,只能與MQTT代理進行通信。MQTT客戶端可以是Arduino、樹莓派、ESP32等任何設備,也可以是Node-RED或MQTTfx等應用程序。
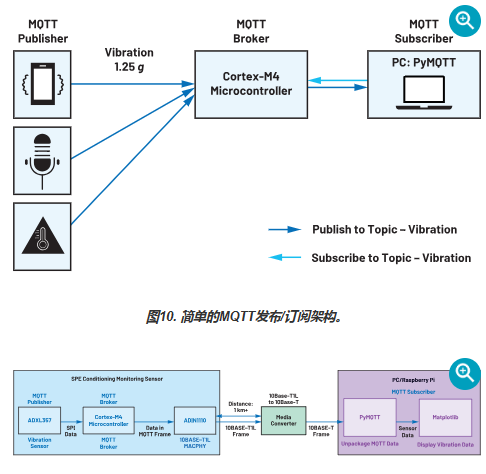
圖11. 可部署單對以太網狀態監測傳感器框圖。
圖11中的前四個模塊由傳感器、微控制器、MAC-PHY和媒體轉換器組成。該傳感器是一款可以檢測振動的數字輸出三軸MEMS傳感器。從ADXL357讀取數據可采用任何帶有SPI接口的標準低功耗微控制器,如MAX78000或MAX32670。MAX78000具有額外優勢,可通過內置卷積神經網絡(CNN)硬件加速器提供超低功耗邊緣AI處理功能。
將測量的振動數據放入MQTT主題中,以便再次通過SPI傳輸到MACPHY。可使用低成本的Cortex?-M4微控制器通過SPI讀/寫ADIN1110 MACPHY,以啟用各種模式和配置,如“打開”或“關閉”PoDL、T1L專用、主節點或子節點、1 V或2.4 V。ADIN1110將MQTT數據主題轉換為10BASE-T1L格式,并通過300 m長的IP67級電纜傳送,具有先進的屏蔽特性,可在1700 m內保持穩健的性能。然后,媒體轉換器將數據從10BASE-T1L轉換為10BASE-T格式,以便PC或樹莓派解譯數據,然后進行處理和顯示。
ADIN1110 10BASE-T1L MAC-PHY
ADIN1110是一款面向工業應用的穩健型單端口低功耗10BASE-T1L以太網MAC-PHY收發器。ADIN1110具有集成的MAC接口,可通過SPI與各種主機控制器直接連接。該SPI通信通道可使用低功耗處理器,無需集成MAC,整體系統級功耗非常低。ADIN1110設計用于樓宇、工廠和過程自動化中部署的邊緣節點傳感器和現場儀表。該器件采用1.8 V或3.3 V單電源軌供電,支持1.0 V和2.4 V幅度工作模式和外部端接電阻,支持在本安型環境中使用。ADIN1110支持可編程發射電平、外部端接電阻和獨立的接收和發送引腳,適合各種本質安全應用。
以太網至現場或邊緣的愿景是將所有傳感器和執行器連接到一個融合IT/OT網絡。由于其中一些傳感器受功率和空間的限制,因此實現這一愿景面臨系統工程方面的挑戰。適用于傳感器和執行器應用、具備強大內部存儲功能的低功耗、超低功耗微控制器市場需求日益增長。但大多數這樣的處理器都有同樣的問題,那就是沒有集成的以太網MAC,不支持MII、RMII或RGMII媒體獨立(以太網)接口。傳統的PHY無法連接到這些處理器/微控制器。
表8中顯示了可部署單對以太網狀態監測傳感器的固件實現。
| 存儲器類型 | 描述 | 容量 (kB) |
| 總RO(常量) | 代碼 + 只讀 | 110 |
| 總RAM容量 | 可讀寫數據 + 0初始化數據 | 121 |
| 總ROM容量 | 代碼 + 只讀數據 + 可讀寫數據 | 110 |
大多數帶有足量存儲器的低成本Cortex-M4微控制器都適合此應用。SPE狀態監測傳感器的軟件架構如圖13所示,它由多個元件組成,相應的框圖如圖12所示。微控制器可以輕松處理操作系統(FreeRTOS)和MQTT庫,以及輕型IP協議棧或lwIP。lwIP是TCP/IP協議套件的小型獨立開源實現,旨在減少RAM占用,同時仍提供全面的TCP。FreeRTOS提供的開源操作系統具有詳盡記錄且受到良好支持,因此可輕松添加新的代碼功能塊。lwIP TCP/IP實現的目標是提供全面的傳輸控制協議(TCP),同時減少資源占用,因此lwIP非常適用于具有幾十kB可用RAM和約40 kB代碼ROM的嵌入式系統。還有一些附加應用程序,例如用來提供MQTT功能的MQTT客戶端。MQTT塊配置為發布/訂閱模式,可提供精簡、高效的解決方案。在與lwIP協議棧通信之前,ADIN1110驅動器需先與地址解析協議(ARP)塊進行通信,以確保微控制器與ADIN1110之間能夠實現無縫網絡通信。
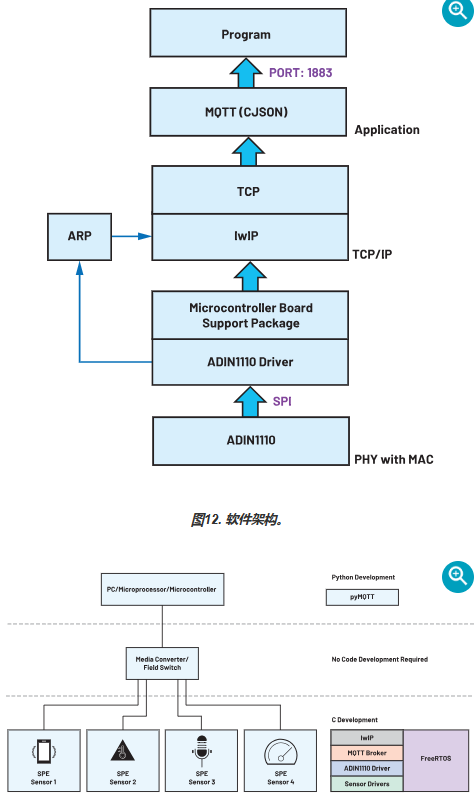
圖13. 傳感器框圖和每個塊的代碼開發要求。
PyMQTT是一個基于Python的庫擴展,支持將MQTT客戶端集成到Web應用程序中。它可用于訂閱SPE傳感器、提取數據并將其顯示在GUI中,因此能夠有效地充當paho-mqtt包的包裝器,以簡化Python應用程序中的MQTT集成。
ADIN2111:集成10BASE-T1L PHY的低復雜度、2端口以太網交換機
ADIN2111使用長距離10BASE-T1L技術為工廠/樓宇中的每個節點添加以太網連接,從而簡化了網絡管理。ADIN2111支持低功耗邊緣節點設計,并通過SPI與多種主機控制器連接。ADIN2111等雙端口交換機可用于在線形或環形拓撲中受約束的邊緣節點之間以菊花鏈方式傳輸數據。線形或環形拓撲是工業部署中的主要架構。每個設備需要兩個端口用于輸入和輸出,因此各需一個交換機和兩個10BASE-T1L PHY(ADIN2111可提供)。
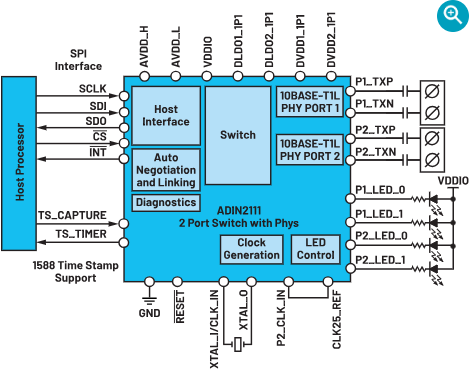
圖14. ADIN2111功能框圖。
ADIN2111可通過一系列診斷特性監控鏈路質量并檢測故障,從而縮短調試時間和系統停機時間。它支持通過1千米電纜進行實時故障檢測和故障位置識別,精度達到2%,有助于縮短系統停機和調試時間。ADIN2111可利用部署的現有單根雙絞線基礎設施,使傳感器、執行器和控制器網絡以線形或環形拓撲進行連接。
數據采集與GUI
使用基于Python的GUI可以在時域和頻域中實現振動數據的可視化,如圖15所示。Python GUI是可執行文件,因此無需進行代碼開發(除非您想要對其進行修改)。
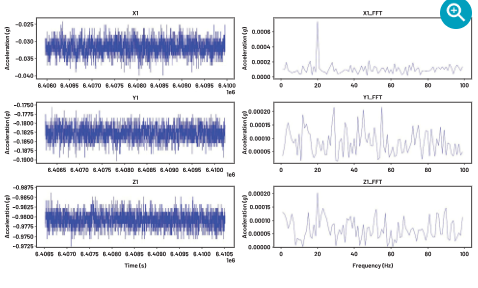
圖15. SPE傳感器測量細微的20 Hz振動。
為了驗證SPE傳感器系統的性能,測試人員進行了一系列測試。失衡負載測試可作為一種可靠的方法來測試振動傳感器的性能,因為很容易識別出時域和頻域特征。圖16左側為時域數據,右側為頻域數據。關于在電機轉速或基本速度下對失衡負載測量的振動,y軸和z軸上可顯示出與其相關的清晰正弦信號。這是因為y軸和z軸的定位便于測量失衡電機的最大振動響應。x軸確實也測量到一些重復數據,但并非正弦,而且振幅比y軸和z軸至少低一個數量級。但是在頻域圖上,x軸同y、z軸一樣能清晰顯示出失衡特征,但幅度要高得多。
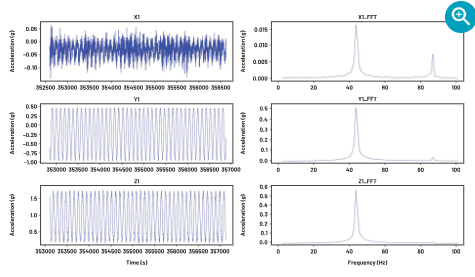
圖16. SPE傳感器檢測9 VDC電機(轉子上有偏心重量)的失衡負載。
為了研究系統的噪聲性能,測試人員進行了另一項測試:將信號音發生器與SPE傳感器放在的同一底板上。人手無法察覺到振動,但ADXL357與10BASE-T1L通信管道相結合能夠可靠地檢測到所有三個軸上的異常。
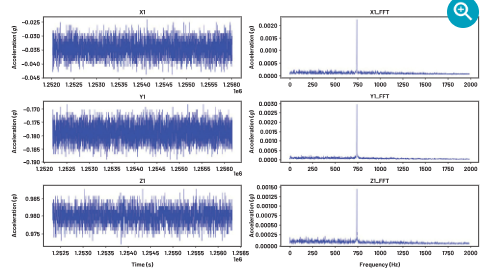
圖17. 750 Hz振動信號音測量。
結論
ADI公司在狀態監測領域具有深厚的專業知識,憑借強大的傳感器、功率器件和以太網連接產品組合,幫助設計人員打造較理想的設計,在市場競爭中旗開得勝。ADIN1110單對以太網MAC-PHY是設計人員進行振動傳感器設計的明智選擇,可利用以太網IP尋址能力隨時隨地訪問設備的狀態信息。
-
電源
+關注
關注
184文章
17580瀏覽量
249483 -
傳感器
+關注
關注
2548文章
50667瀏覽量
751947 -
以太網
+關注
關注
40文章
5374瀏覽量
171100
發布評論請先 登錄
相關推薦
工業以太網標準10BASE-T1L的最佳PHY是什么呢?
ADIN1100:堅固、工業、低功耗10BASE-T1L以太網PHY初步數據表

ADI公司推出10BASE-T1L以太網解決方案
ADI推出完整10BASE-T1L以太網解決方案
10BASE-T1L MAC-PHY如何簡化低功耗處理器以太網連接
設計可部署的10BASE-T1L單對以太網狀態監測振動傳感器
10BASE-T1L MAC-PHY如何簡化低功耗處理器以太網連接
通過10BASE-T1L連接實現現場無縫以太網
10BASE-T1L:將大數據分析范圍擴大到工廠網絡邊緣
10BASE-T1L使智能現場儀表供電變得無痛
如何在自動化和工業場景中集成新的10BASE-T1L以太網物理層標準

如何設計便于部署的10BASE-T1L單對以太網狀態監測振動傳感器

10BASE-T1L樓宇控制器如何助力實現可持續樓宇管理系統






 工商網監
工商網監
評論