 使用Processing與Arduino進行交互將MPU6050數據進行3D建模展示
使用Processing與Arduino進行交互將MPU6050數據進行3D建模展示
對MPU6050姿態解算得到歐拉角后,就可以應用于四軸等對姿態進行控制了。為了更直觀的理解三個歐拉角,本篇我們使用Processing軟件與Arduino進行交互,將MPU6050數據進行3D建模展示。
1
Processing介紹
Processing是一種文本編程語言,主要用于處理可視化數據,并可以將數據呈現為2D或3D模型 。它以Java語言為基礎,并且做了擴展和延伸,將計算機編程和藝術創作完美結合,將代碼轉換成千變萬化的圖像。
對于電子愛好者來說,我們以單片機、Arduino等MCU為主的嵌入式應用很難將數據進行直觀的展示,通過C#、QT等來開發PC機上的可視化軟件又比較復雜,而通過Processing這一開源平臺可簡單方便的實現互動。
在這里我們不對Processing進行展開講解,如讀者對其感興趣可關注后續系列教程筆記。
2
Prosessing軟件及其庫安裝
我們可以登錄Processing官網進行軟件下載,本文寫作時,最新版本為3.5.4。
本文使用Windows-64bit版本,另外還需要安裝"toxiclibs"庫。為方便大家使用,已經將資源進行了整理,可在文末獲取。
將下載的Processing壓縮包進行解壓,雙擊可執行文件即可運行軟件。

安裝Processing
在軟件運行后,會在"C:\\Users\\Tony\\Documents"目錄下生成Processing文件夾,其中"Tony"為電腦用戶名。將下載的庫文件"toxiclibs-complete-0020.zip"進行解壓,將解壓文件拷貝到該目錄下的libraries文件夾,即可完成庫安裝。

安裝庫文件
3
實驗材料
4
實驗步驟
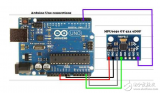
1.根據原理圖搭建電路圖。
MPU6050傳感器模塊的VCC、GND分別連接開發板的3.3V、GND,傳感器的SDA、SCL引腳連接開發板A4、A5引腳。
實驗原理圖如下圖所示:

實驗原理圖
2.啟動Arduino IDE,點擊「文件」—「示例」,在示例中找到上一篇安裝的MPU6050驅動庫示例「MPU6050_DMP6」。

打開示例文件
3.對代碼進行簡單修改,將代碼103行屏蔽掉,打開120行宏定義。選擇開發板及端口號,上傳程序。

修改代碼

程序下載
4.啟動Processing,點擊「文件」—「打開」,打開MPU6050驅動庫MPUTeapot文件夾下MPUTeapot.pde,文件路徑為"C:\\Users\\Tony\\Documents\\Arduino\\libraries\\MPU6050\\examples\\MPU6050_DMP6\\Processing\\MPUTeapot",其中"Tony"為電腦用戶名。

打開Processing程序
5.屏蔽代碼71行,然后在74行修改添加當前Arduino開發板端口號,例如我的是COM18,然后點擊運行。

運行Processing
5. 實驗現象
運行Processing后,會出現小飛機模型,晃動MPU6050,小飛機會在3D坐標中運動。

實驗現象
-
MPU
+關注
關注
0文章
347瀏覽量
48735 -
Arduino
+關注
關注
187文章
6464瀏覽量
186654 -
GND
+關注
關注
2文章
529瀏覽量
38657 -
MPU6050
+關注
關注
39文章
307瀏覽量
71187 -
MCU芯片
+關注
關注
3文章
248瀏覽量
11388
發布評論請先 登錄
相關推薦
Arduino與MPU6050的通信
一文看懂mpu9150和mpu6050區別
MPU6050常見問題的分析與處理

使用MPU6050、ESP8266和Qubitro進行ART分析
使用arduino、mpu6050和python控制游戲
Arduino MPU6050 32x8矩陣上的交互式滾動游戲





 工商網監
工商網監
評論