 基站中的無源交調(PIM)效應:了解挑戰和解決方案
基站中的無源交調(PIM)效應:了解挑戰和解決方案
Frank Kearney 和 Steven Chen
眾所周知,有源器件會在系統中產生非線性效應。人們已開發出多種技術來改善此類器件在設計和運行階段的性能。容易忽視的是,無源器件也可能引入非線性效應;雖然有時相對較小,但若不加以校正,這些非線性效應可能會嚴重影響系統性能。
PIM表示"無源交調"。它代表兩個或更多信號通過一個具非線性特性的無源器件傳輸時產生的交調產物。機械連接部分的相互作用一般會引起非線性效應,這在兩種不同金屬的接合處尤為明顯。實例包括:松動的電纜連接、不干凈的連接器、性能糟糕的雙工器或老化的天線等。
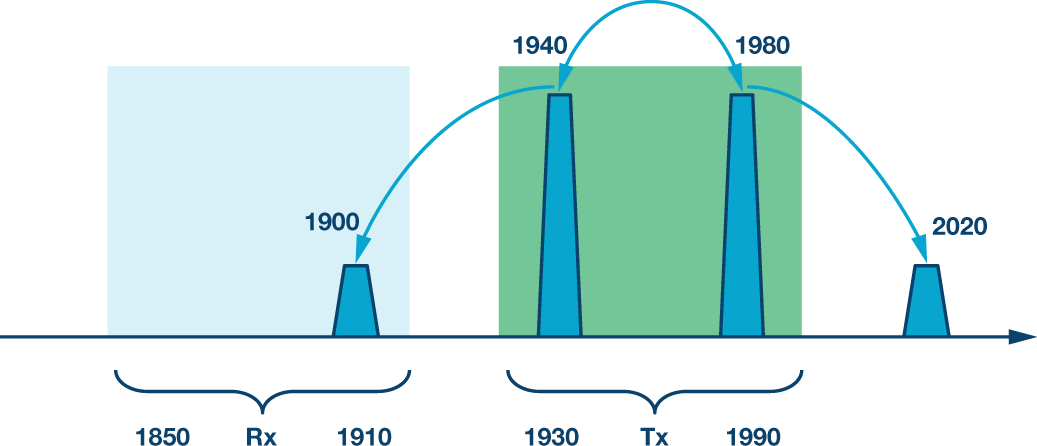
無源交調在蜂窩通信行業是一個重大問題,而且非常難以排解。在蜂窩通信系統中,PIM可能引起干擾,降低接收機靈敏度,甚至完全阻塞通信。這種干擾可能影響產生它的蜂窩以及附近的其他接收機。例如,在LTE頻段2中,下行鏈路范圍是1930 MHz至1990 MHz,上行鏈路范圍是1850 MHz至1910 MHz。若有兩個分別位于1940 MHz和1980 MHz的發射載波從具有PIM的基站系統發射信號,則其交調會產生一個位于1900 MHz的分量,該分量落入了接收頻段,這會影響接收機。此外,位于2020 MHz的交調可能影響其他系統。
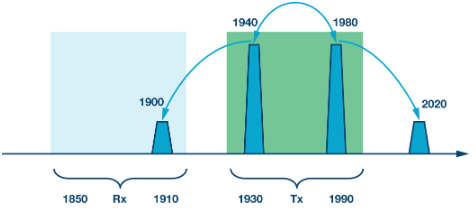
圖1.無源交調,落到接收機頻段
隨著頻譜變得越來越擁擠,并且天線共享方案變得越來越普遍,不同載波的交調產生PIM的可能性也在增加。利用頻率規劃避免PIM的傳統方法變得越來越不可行。除上述挑戰外,CDMA/OFDM等新型數字調制方案的采用意味著通信系統的峰值功率也在提高,使PIM問題"雪上加霜"。
對服務提供商和設備供應商而言,PIM是一個突出的嚴重問題。檢測并盡可能解決該問題,可提高系統可靠性并降低運行成本。本文嘗試評述PIM的來源和原因,以及予以檢測和解決的技術。
PIM分類
初步的調查顯示,PIM有三種不同類型,每類有不同的特點,需要不同的解決方案。我們選擇按如下類型分類:設計引入PIM、裝配PIM和銹體PIM。
設計引入PIM
我們知道,某些無源器件與其傳輸線路一起會產生無源交調。因此,當設計系統時,開發團隊應根據器件制造商給出的規格,選擇PIM最小或處于可接受水平的無源元件。環行器、雙工器和開關特別容易產生PIM效應。設計人員若能接受較高水平的無源交調,那么可以選擇成本較低、尺寸較小或性能較低的器件。
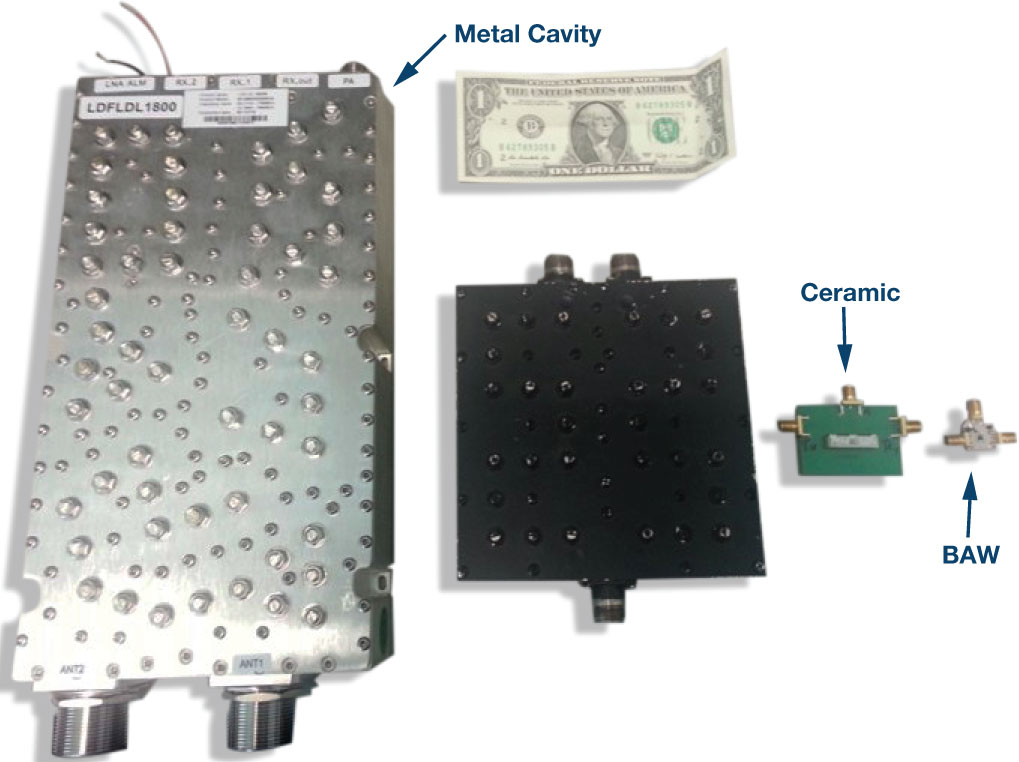
圖2.器件設計權衡:尺寸、功耗、抑制和PIM性能
如果設計人員真的選擇性能較低的器件,則相應的較高水平交調可能會落回到接收機頻段內,導致接收機降敏。必須注意:在這種情況下,不良頻譜輻射或功率效率損失可能不如PIM導致接收機降敏那樣令人關注。在小型蜂窩無線電設計中,此問題尤其重要。ADI公司目前正在研發可從接收信號中檢測、模擬、消除(抵消)雙工器等靜態無源元件PIM的技術(參見圖3)。

圖3.PIM的產生以及PIM抵消算法
該算法之所以有效,是因為它知曉載波信息,并且可以使用接收機相關性來確定交調偽像,然后從收到的信號中消除。
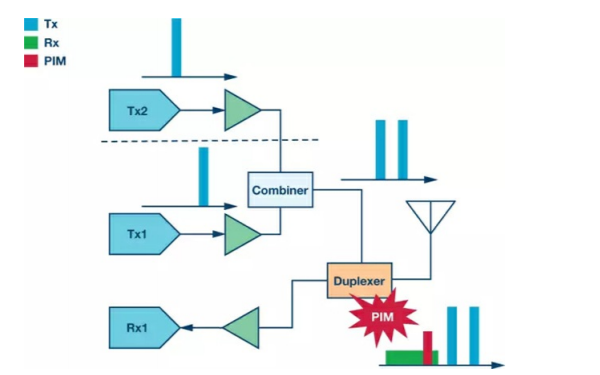
當不再能利用相關性確定交調偽像時,該算法的局限性便開始浮現。圖4顯示了一個實例。在該例中,兩個不同的發射機共享一根天線。如果假設每條路徑的基帶處理是彼此獨立的,那么算法便不太可能知曉二者信息,故而它能在接收機執行的相關性和抵消處理會受限。
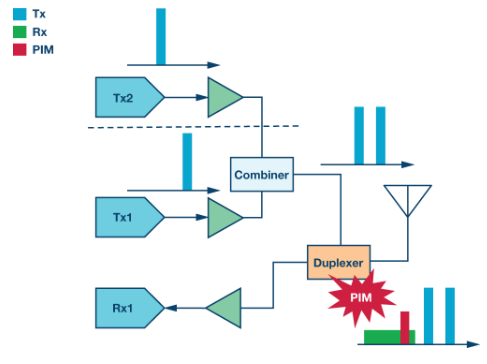
圖4.多源共享一根天線
加之于PIM挑戰的復雜性
站點訪問和成本給服務提供商帶來了挑戰,我們開始發現越來越多這樣的事例:不同發射機共享單根寬帶天線。其架構可以是各種頻段和格式的混合:TDD + FDD;TDD:F + A + D,FDD:B3,等等。圖5顯示了這種配置的概貌。在這個例子中,客戶試圖實現一個復雜但現實的配置。一個分支是TDD雙頻,另一分支是FDD單頻,采用一個雙工器。信號匯合起來,共享單根天線。Tx1和Tx2信號之間的無源交調發生在來自合并器的路徑中、到天線的傳輸線路中以及天線本身中。所得的交調偽像落回到FDD接收機頻段Rx2。
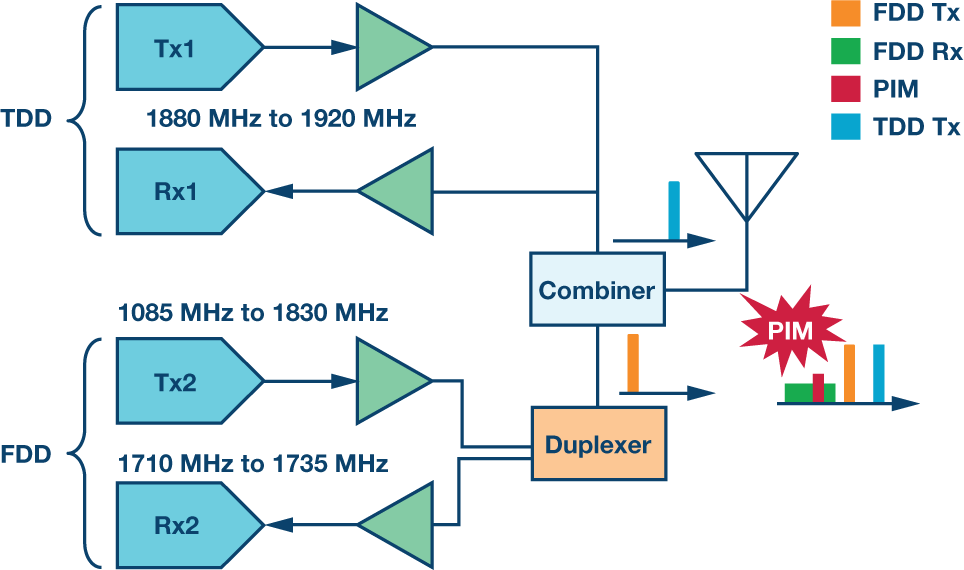
Figure 5. FDD/TDD 單根天線實現方案
圖6所示為對一個雙頻系統的實際分析。注意在這個例子中,我們需要考慮三階以上的無源調制偽像。這種情況下,重點關注從一個頻段(內部)落回到另一個接收機頻段內的交調偽像。
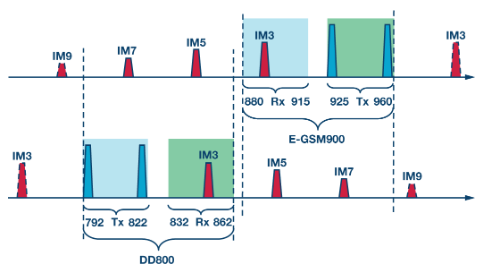
圖6.多頻PIM問題
裝配PIM
我們把第二類PIM稱為裝配PIM。雖然系統在安裝后可以令人滿意地運作,但經過一段時間后,由于天氣或初次安裝質量糟糕,其性能常常會下降。發生這種情況時,信號路徑中的無源元件(連接器、電纜、電纜組件、波導組件和元器件等)通常會開始表現出非線性行為。事實上,某些主要的PIM現象就是由連接器、連接甚至天線本身的饋線引起的。所產生的影響可能與上面討論的設計引入PIM相似,因此可以使用同樣的PIM測量理論,該理論專門用于尋找無源交調產物的存在。
引起裝配PIM的典型因素有:
連接器適配接口(通常是N型或DIN7/16)
電纜附件(電纜/連接器接合的機械穩定性)
材料(建議使用黃銅和銅,鐵磁材料有非線性特性)
清潔度(塵土污染或水汽)
電纜因素(電纜的質量和魯棒性)
機械魯棒性(風和振動引起撓曲)
電熱感應PIM(原因是非恒定包絡的RF信號消耗的功率隨時間而變化,引起溫度改變,進而導致電導率發生變化)。
溫度變化大、空氣帶有鹽分/受污染或存在過大振動的環境往往會加重PIM問題。雖然可以使用與針對設計引入PIM相同的PIM測量技術,但可以認為,裝配PIM的存在表明系統的性能和可靠性均有所降低。若不加以解決,引起PIM的缺陷因素可能會變本加厲,直至整個傳輸路徑發生故障。對裝配PIM采用PIM抵消方法更像是掩蓋問題而非解決問題。
可以想見,此類情況下,用戶可能并不希望抵消PIM,而是希望得知PIM的存在,以便消除根本原因。為此,首先需要確定PIM是從系統何處引入的,然后修理或更換特定元件。
我們可以認為設計引入PIM是可量化且穩定的,但上面所述的裝配PIM是不穩定的。它可能存在于一組范圍非常窄的條件下,其幅度變化可能超過100 dB。單次離線掃描可能無法捕捉到此類事例;理想情況下,傳輸線路診斷需要與PIM事件協同進行。
天線之外的PIM(銹體PIM)
PIM并不局限于有線傳輸路徑,也可能發生在天線之外。該效應也被稱為"銹體PIM"。這種情況下,無源交調發生在信號離開發射機天線之后,所產生的交調反射回接收機中。"銹體"這一說法來源于這樣一個事實:很多情況下,交調源可能是生銹的金屬物件,例如鐵絲網、倉庫或排水管。
金屬物件會引起反射。但在這些情況下,金屬物件不僅會反射收到的信號,而且會產生并輻射交調偽像。交調的發生同在有線信號路徑中一樣,即發生在兩種不同金屬或異質材料的接合處。電磁波產生的表面電流會混合并再輻射(參見圖7)。再輻射信號的幅度一般非常低。然而,如果輻射物件(生銹鐵絲網、倉庫或下水管等)靠近基站接收機,而且交調產物落在接收機頻段內,將造成接收機降敏。
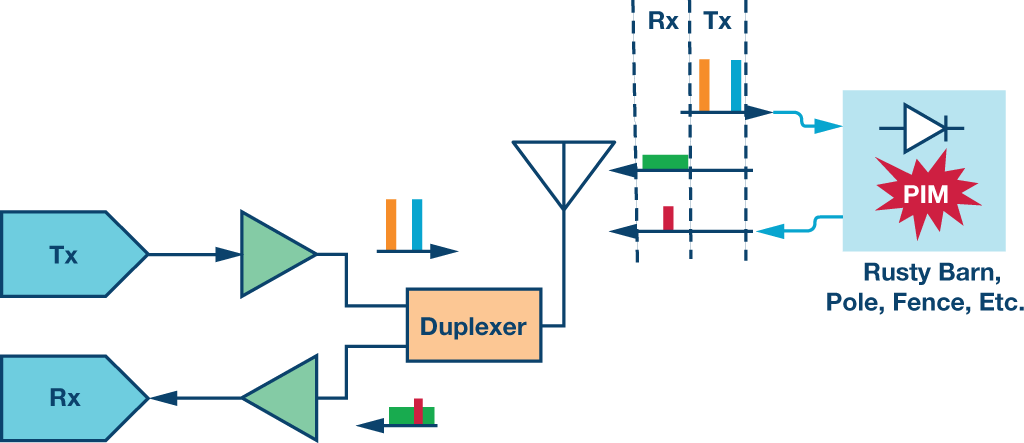
圖7.天線之外或銹體PIM
某些情況下,PIM源可通過天線定位來檢測:一邊改變天線位置,一邊監測PIM水平。此外,也可以利用時間延遲估計來定位PIM源。如果PIM水平穩定,則可以利用標準算法抵消技術來補償PIM。但更多情況下,PIM貢獻受到振動、風和機械運動的影響,使得抵消非常難以進行。
PIM檢測:定位PIM源
線路掃描
可以實施多種線路掃描技術。線路掃描測量傳輸系統在目標頻段上的信號損耗和反射。我們不能認為線路掃描總是會精確指示PIM的可能原因。線路掃描更像是一種診斷工具,可幫助識別傳輸線路上的問題。早期裝配問題可能表現為PIM;若不加以解決,這些裝配問題可能會升級,引起更為嚴重的傳輸線路故障。線路掃描通常分為兩個基本測試:回波損耗和插入損耗。二者均與頻率有很大關系,且在指定頻段內均可能變化很大。回波損耗衡量天線系統的功率傳輸效率。務必使反射回到發射機的功率最小。任何反射功率都可能使發射信號失真;若反射回的功率足夠大,甚至會損壞發射機。20 dB的回波損耗值表示1%的發射信號被反射回發射機,99%到達天線——通常認為這是相當好的性能。10 dB的回波損耗表示10%的信號被反射,表明性能不理想。如果回波損耗測量值為0 dB,則100%的功率被反射,這很可能是開路或短路導致的。
時域反射
可以利用高級TDR技術來提供一個最優系統的參考映射,以及確定傳輸路徑上開始發生損耗的確切位置。通過這種技術,操作員可以定位PIM源,從而有針對性地、高效率地予以修復。傳輸線路映射還能提醒操作員注意一些早期故障跡象,防止其嚴重影響性能。時域發射法(TDR)測量信號經過傳輸線路所產生的反射。TDR儀器讓一個脈沖通過介質,然后將未知傳輸環境產生的反射與標準阻抗產生的反射進行比較。圖8顯示了一個簡化TDR測量設置框圖。
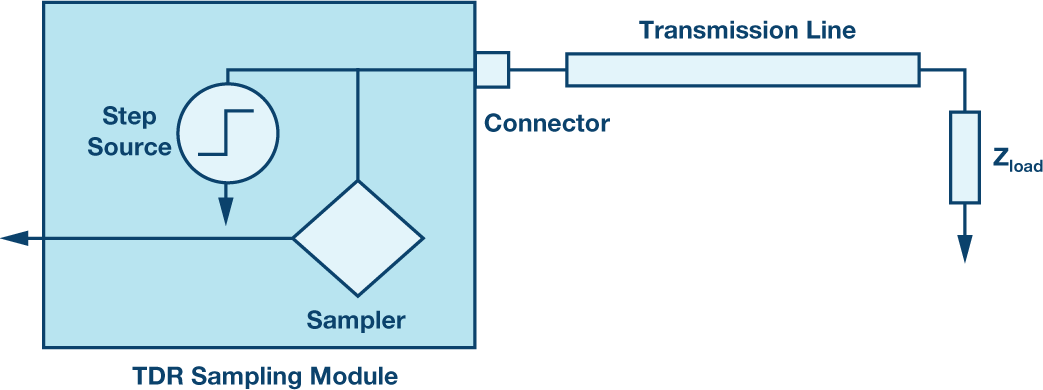
圖8.TDR設置框圖
圖9顯示了一個TDR傳輸線路映射實例。
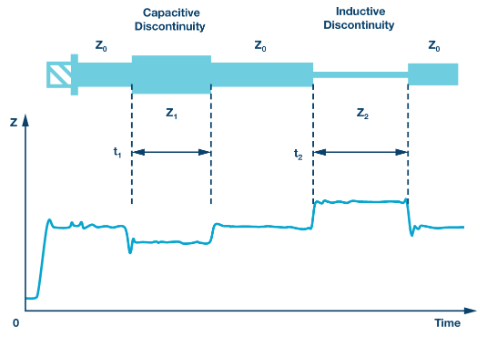
圖9.TDR傳輸線路映射
頻域反射
雖然TDR和FDR的工作原理均是沿著傳輸線路發送激勵信號并分析反射,但這兩種技術的實現方法非常不同。FDR技術采用RF信號掃描,而不是TDR所用的直流脈沖。另外,FDR要比TDR靈敏得多,能以更高的精度定位系統性能故障或降低的地方。頻域反射法原理涉及源信號和反射信號(來自傳輸線路中的故障和其他反射特性)的矢量相加。TDR采用非常短的直流脈沖作為激勵信號,其本身就能覆蓋非常寬的帶寬,而FDR掃描RF信號實際上是在特定目標頻率(通常在系統的預期工作范圍內)運行。
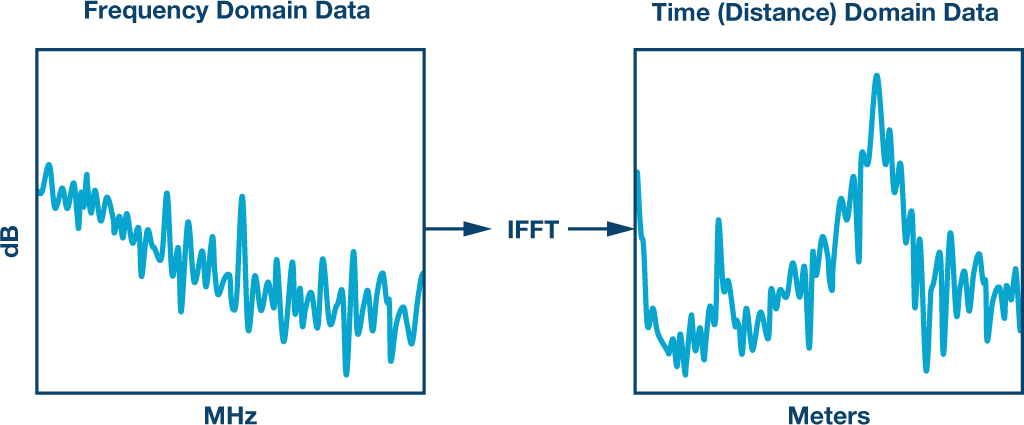
圖10.FDR原理,掃描頻率回波損耗與距離的關系
PIM定位
必須注意,雖然線路掃描可以指示阻抗不匹配,從而指示傳輸線路PIM源,但PIM和傳輸線路阻抗不匹配可以是互斥的。PIM非線性可能出現在線路掃描結果未指示任何傳輸線路問題的地方。因此,若要給用戶提供一種解決方案,要求不僅能指示PIM存在,而且能準確識別傳輸線路上何處發生該問題,就需要采用更復雜的實施方案。
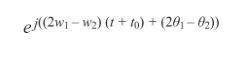
綜合PIM線路測試的工作模式與針對設計引入PIM抵消所述的模式相似,不同之處是算法檢查交調產物時間延遲估計的情況不同。應當注意,這些情況中的優先事項并非PIM偽像的抵消,而是定位傳輸線路上何處發生交調。該概念也被稱為"PIM定位"(DTP)。例如,在一個雙音測試中,
信號音1:

信號音2:

w1和w2為頻率; θ1和θ2為初始相位;t0為初始時間。
IMD(例如低端)將為:
很多現有解決方案要求用戶中斷傳輸路徑,插入一個PIM標準裝置(它能產生固定量的PIM,用來校準測試設備)。使用PIM標準裝置可為用戶提供一個基準IMD,它在傳輸路徑的特定位置/距離處并具有已知相位。圖11(a)顯示了概況。IMD相位θ32(如圖11所示)用作基準位置0。
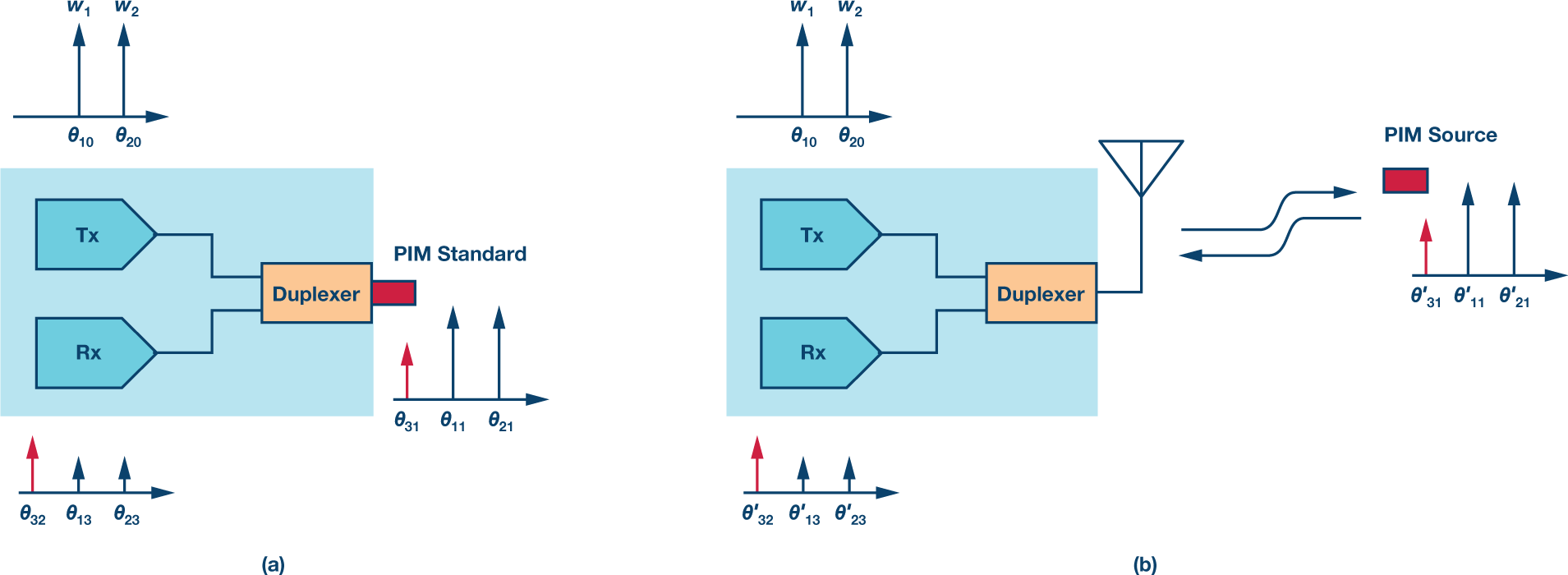
圖11.PIM定位
一旦完成初始校準,便重構系統并測量系統PIM,如圖11(b)所示。θ32和θ'32之間的相位差可用來計算到PIM的距離。

其中,D為到PIM的距離,S為波傳播速度(取決于傳輸介質)。
裝配和銹體PIM可能是一個慢速遞增的過程;完成安裝后初期,基站可以高效率工作,但經過一段時間后,此類PIM現象可能會開始變得突出。振動或風等環境因素可能會影響PIM水平,故PIM的性質和特點是動態起伏不定的。掩蓋或抵消PIM不僅可能很困難,而且可能被認為掩蓋了更為嚴重的問題,若不加以解決,可能引發整體系統故障。這種情況下,運營商會希望避免系統整體停機的相關成本,快速定位引起PIM的器件并予以更換。
PIM定位技術(DTP)還為基站運營商提供了這樣一種可能性:跟蹤系統性能隨時間而降低的情況,提前發現潛在問題。有了這些信息,便可在計劃維修期間更換薄弱點,避免代價巨大的系統停機和專門維修工作。
結語
無源交調并不是什么新鮮事。這種現象已經存在多年,為人所知也有段時間了。近年來,業界的兩種不同變化又把它拉回人們的視野:
第一,高級算法現在可通過一種智能方式來檢測和定位PIM,并且能酌情予以補償。以前的無線電設計人員必須選擇能夠滿足特定PIM性能要求的器件,但在PIM抵消算法的幫助下,他們現在有了更大的選擇自由。他們能夠選擇企及更高的性能,或者用成本較低且尺寸較小的器件實現相同的性能水平。抵消算法通過數字化方式輔助硬件元件。
第二,隨著基站塔的密度和多樣性爆炸式增長,我們面臨著特殊系統設置(例如天線共享)帶來的全新挑戰。算法抵消取決于對主要傳輸信號的了解。在塔上空間寶貴的情況下,不同發射機可能共享單根天線,導致出現不良PIM效應的可能性大大增加。這種情況下,算法可能知道發射機路徑某些部分的信息,并且可以有效工作。而在發射路徑某些部分信息未知的情況下,第一代高級PIM抵消算法的性能或實現可能會受限。
隨著基站設備領域的挑戰難度不斷加大,PIM檢測和抵消算法在短期內預計能給無線電設計人員帶來相當大的好處和優勢,但要求開發工作跟上未來挑戰的步伐。
審核編輯:郭婷
-
接收機
+關注
關注
8文章
1180瀏覽量
53408 -
通信系統
+關注
關注
6文章
1176瀏覽量
53287 -
基站
+關注
關注
17文章
1390瀏覽量
66730
發布評論請先 登錄
相關推薦


基站中的無源交調效應
基站中的無源互調效應:了解挑戰和解決方案






 工商網監
工商網監
評論