 新型iMEMS角速率檢測陀螺儀
新型iMEMS角速率檢測陀螺儀
John Geen 和 David Krakauer
ADI公司的ADXRS150和ADXRS300陀螺儀的滿量程范圍為150°/s和300°/s,代表了陀螺儀技術的一次量子飛躍。作為首款帶有集成電子元件的商用表面微加工角速率傳感器,它們比任何具有類似功能的陀螺儀都更小,功耗更低,抗沖擊和振動能力更好。這一真正的突破之所以成為可能,是因為ADI公司專有的集成微機電系統(iMEMS)工藝,該工藝已在數百萬個汽車加速度計中使用。
產品描述
陀螺儀用于測量角速率——物體轉動的速度。旋轉通常參考以下三個軸之一進行測量:偏航、俯仰或滾動。
圖1顯示了相對于安裝在平面上的封裝的每個靈敏度軸的示意圖。具有一個靈敏度軸的陀螺儀也可用于通過不同安裝陀螺儀來測量其他軸,如右圖所示。在這里,偏航軸陀螺儀(如ADXRS150或ADXRS300)安裝在其側面,使偏航軸成為橫滾軸。
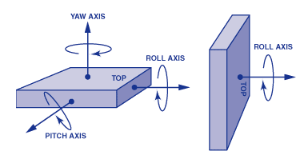
圖1.旋轉靈敏度的陀螺儀軸。根據陀螺儀通常的位置,其靈敏度主軸可以是三個運動軸之一:偏航、俯仰或滾動。ADXRS150和ADXRS300是偏航軸陀螺儀,但它們可以通過適當的安裝方向測量繞其他軸的旋轉。例如,在右側:偏航軸設備定位用于測量側傾。
作為如何使用陀螺儀的一個例子,安裝在以 33 1/3 rpm(每分鐘轉數)旋轉的轉盤上的偏航軸陀螺儀將測量 360° 乘以 33 1/3 rpm 除以 60 秒或 200°/s 的恒定旋轉。陀螺儀將輸出與角速率成比例的電壓,由其靈敏度決定,以毫伏每秒度(mV / °/ s)為單位。滿量程電壓決定了可以測量的角速率,因此在轉盤示例中,陀螺儀需要具有至少對應于200°/s的滿量程電壓。滿量程受可用電壓擺幅除以靈敏度的限制。例如,ADXRS300的滿量程為1.5 V,靈敏度為5 mV/°/s,處理300°/s的滿量程。ADXRS150的滿量程更有限,為150°/s,但靈敏度更高,為12.5 mV/°/s。
一個實際應用是通過在車內安裝陀螺儀來測量汽車的轉彎速度;如果陀螺儀感覺到汽車正在失控,差速制動就會啟動以使其重新控制。角速率也可以隨時間進行積分以確定角位置 - 當衛星信號短時間丟失時,對于保持基于GPS的導航的連續性特別有用。
科里奧利加速
ADI公司的ADXRS陀螺儀通過科里奧利加速度測量角速率。科里奧利效應可以解釋如下,從圖 2 開始。考慮一下自己站在靠近中心的旋轉平臺上。您相對于地面的速度如圖 2 中的藍色箭頭長度所示。如果您要移動到平臺外邊緣附近的點,您的速度將相對于地面增加,如較長的藍色箭頭所示。由徑向速度引起的切向速度增加率是科里奧利加速度(以法國數學家加斯帕德·G·德·科里奧利斯(Gaspard G. de Coriolis,1792-1843)的名字命名)。
如果Ω是角速率并且是半徑,則切向速度為 Ωr。因此,如果 r 以速度 v 變化,則會出現切向加速度 Ωv。這是科里奧利加速度的一半。還有一半來自改變徑向速度的方向,總共得到2Ωv(見附錄)。如果你有質量M,平臺必須施加一個力,2MΩv,以引起這種加速度,質量經歷相應的反作用力。
圖2.科里奧利加速度示例。向北向旋轉平臺外邊緣移動的人必須增加向西的速度分量(藍色箭頭)以保持北行路線。所需的加速度是科里奧利加速度。
ADXRS陀螺儀利用這種效應,使用類似于人在旋轉平臺上移出和移入的共振質量。質量由多晶硅微加工而成,并拴在多晶硅框架上,因此它只能沿一個方向共振。
圖3顯示,當共振質量向旋轉的外邊緣移動時,它向右加速并向左對框架施加反作用力。當它向旋轉中心移動時,它會向右施加力,如橙色箭頭所示。
為了測量科里奧利加速度,包含共振質量的框架通過彈簧相對于共振運動以90°拴在基板上,如圖4所示。該圖還顯示了科里奧利感應手指,用于電容感應框架的位移,以響應質量施加的力,如下所述。如果彈簧具有剛度 K,則由反作用力產生的位移將為 2 ΩvM/K。
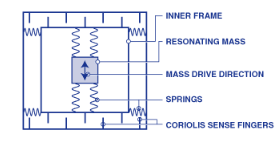
圖4.陀螺儀的機械結構示意圖。
圖5顯示了完整的結構,表明隨著共振質量的移動,以及陀螺儀安裝的表面的旋轉,質量及其框架經歷科里奧利加速度,并從振動運動中平移90°。隨著旋轉速率的增加,質量的位移和從相應電容獲得的信號也會發生變化。
應該注意的是,陀螺儀可以放置在旋轉物體上的任何位置和任何角度,只要其感應軸平行于旋轉軸即可。上述解釋旨在直觀地了解該功能,并通過陀螺儀的放置進行了簡化。
電容式傳感
ADXRS陀螺儀通過連接到諧振器的電容式傳感元件測量諧振質量及其框架因科里奧利效應引起的位移,如圖4、5和圖6所示。這些元件是硅束,與連接到基板上的兩組固定硅束相互指射,從而形成兩個標稱相等的電容器。由于角速率引起的位移在該系統中會產生差分電容。如果總電容為C,光束間距為g,則差分電容為2 ΩvMC/gK,與角速率成正比。這種關系的保真度在實踐中非常好,非線性小于0.1%。
ADXRS陀螺儀電子器件可以分辨小至12×10的電容變化–21法拉(12 齊法)來自小至 0.00016 埃(16 飛米)的光束偏轉。在實際設備中可以利用的唯一方法是將電子設備(包括放大器和濾波器)與機械傳感器放在同一芯片上。差分信號在諧振器頻率處交替,可以通過相關從噪聲中提取。
圖5.框架和共振質量體響應科里奧利效應橫向位移。位移由框架上的科里奧利感應手指與連接到基板上的手指之間的電容變化決定。
這些亞原子位移作為光束表面的平均位置是有意義的,即使表面上的單個原子隨機移動得更多。大約有10個12電容器表面上的原子,因此其各個運動的統計平均將不確定性降低了 10 倍6.那么,為什么我們不能做得更好100倍呢?答案是,空氣分子的撞擊導致結構移動——盡管平均值相似,但它們的影響要大得多!那么為什么不去除空氣呢?該設備不是在真空中運行的,因為它是一種非常細的薄膜,僅重 4 微克;它的彎曲只有1.7微米寬,懸浮在硅襯底上。空氣緩沖結構,防止其被猛烈的沖擊破壞 - 即使是在榴彈炮發射制導炮彈時所經歷的沖擊(如最近所示)。
圖6.機械傳感器的照片。ADXRS陀螺儀包括兩種結構,可實現差分檢測,從而抑制環境沖擊和振動。
特征
電子元件和機械元件的集成是ADXRS150和ADXRS300等產品的關鍵特性,因為它可以在給定的性能水平下實現最小的尺寸和成本。圖7是ADXRS芯片的照片。
圖7.ADXRS陀螺儀芯片的照片,突出了機械速率傳感器和信號調理電子器件的集成。
ADXRS150和ADXRS300采用行業標準封裝,可簡化用戶的產品開發和生產。陶瓷封裝是一個 32 引腳球形網格陣列 (BGA),尺寸為 7 mm 寬 x 7 mm 深 x 3 mm 高。它比具有類似性能的任何其他陀螺儀至少小 100 倍。除了體積小外,這些陀螺儀消耗30 mW,遠低于類似的陀螺儀。小尺寸和低功耗的組合使這些產品非常適合消費類應用,如玩具機器人、踏板車和導航設備。
抗沖擊和振動能力
陀螺儀用戶最關心的問題之一是設備能否可靠地提供準確的角速率輸出信號,即使在存在環境沖擊和振動的情況下也是如此。這種應用的一個例子是汽車側翻檢測,其中陀螺儀用于檢測汽車(或SUV)是否正在翻車。某些翻車事件是由與另一個物體(例如路緣石)的撞擊觸發的,從而導致車輛受到沖擊。如果沖擊使陀螺儀傳感器飽和,并且陀螺儀無法將其過濾掉,則安全氣囊可能無法展開。同樣,如果道路上的顛簸導致沖擊或振動轉化為旋轉信號,安全氣囊可能會在不需要時展開——這是一個相當大的安全隱患!
如圖6和圖7所示,ADXRS陀螺儀采用一種新的角度速率檢測方法,可以抑制高達1,000g的沖擊——它們使用兩個諧振器來差分檢測信號,并抑制與角運動無關的共模外部加速度。這種方法是ADXRS陀螺儀對沖擊和振動具有出色抗擾度的部分原因。圖6中的兩個諧振器在機械上是獨立的,并且它們以反相方式工作。因此,它們測量相同的旋轉幅度,但給出相反方向的輸出。因此,兩個傳感器信號之間的差異用于測量角速率。這樣可以消除影響兩個傳感器的非旋轉信號。信號在非常靈敏的前置放大器之前的內部硬接線中組合。因此,極端加速度過載在很大程度上被阻止到達電子設備,從而允許信號調理在大沖擊期間保持角速率輸出。該方案要求兩個傳感器匹配良好,彼此精確制造的副本。
總結
ADI公司利用其iMEMS工藝實現了突破,開發出了世界上首款完全集成的角速率傳感器。集成帶來了可靠性、尺寸和價格的革命。其結果是陀螺儀適用于比以前認為可能或負擔得起的更廣泛的應用。該設備的低功耗和小尺寸將使使用電池運行的小型消費和工業產品受益,例如玩具,踏板車和便攜式儀器。對沖擊和振動的巨大抗擾度有利于汽車和其他受到惡劣環境條件影響的應用。
展望未來,可以利用iMEMS工藝和陀螺儀設計技術來實現更高水平的集成。正如ADI公司開發雙軸加速度計一樣,也可以生產多軸陀螺儀。甚至可以在單個芯片上集成加速度計和陀螺儀。由此產生的慣性測量單元甚至可以使微型車輛能夠穩定和自主導航。
附錄
二維運動
考慮位置坐標,z = rεs,在復平面中。關于時間的微分,t,速度是
這兩個項分別是徑向分量和切向分量,后者由角速率產生。再次區分,加速度是

第一項是徑向線性加速度,第四項是由角加速度產生的切向分量。最后一項是約束 r 所需的熟悉的向心加速度。第二項和第三項是切向的,是科里奧利加速度分量。它們分別由徑向速度的變化方向和切向速度的變化大小產生。如果角速率和徑向速度恒定,
然后
其中角分量,iεs,表示科里奧利加速度、2Ωv 和 –ε 的正 u 意義上的切向方向s表示朝向中心(即向心)表示Ω2r 組件。
審核編輯:郭婷
-
傳感器
+關注
關注
2548文章
50678瀏覽量
752019 -
陀螺儀
+關注
關注
44文章
779瀏覽量
98579 -
iMEMS
+關注
關注
0文章
14瀏覽量
8542
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論