") STM32的GPIO在實(shí)際開發(fā)設(shè)計(jì)的使用配置和技巧
STM32的GPIO在實(shí)際開發(fā)設(shè)計(jì)的使用配置和技巧
一、前言
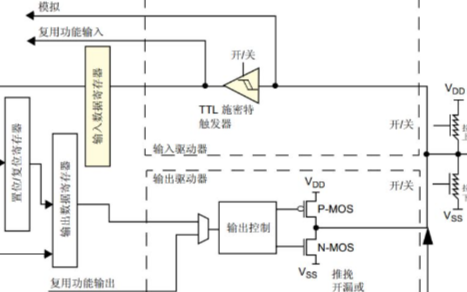
本篇開始對(duì)STM32的GPIO在實(shí)際開發(fā)設(shè)計(jì)中的使用配置和技巧進(jìn)行探討,可以先去回顧下之前介紹的GPIO的相關(guān)理論基礎(chǔ)知識(shí)包括基本結(jié)構(gòu),工作模式和寄存器原理。
了解過STM32的GPIO相關(guān)的理論知識(shí),這樣在應(yīng)用GPIO開發(fā)過程中,能更好的理解GPIO的特點(diǎn),應(yīng)用起來會(huì)更加的得心應(yīng)手。
后續(xù)將從以下圖1中所示的幾個(gè)方面對(duì)GPIO應(yīng)用設(shè)計(jì)中的步驟展開介紹。本篇先介紹GPIO的基本API函數(shù)定義,配置初始化的流程,以及使用技巧;針對(duì)將GPIO的引腳用于外部中斷的功能將作為單獨(dú)的一篇進(jìn)行詳細(xì)的討論介紹。
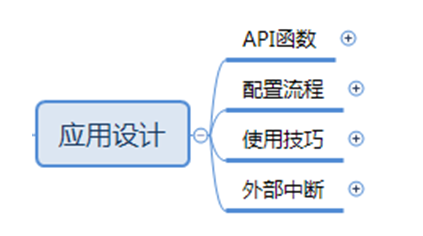
圖1 GPIO應(yīng)用設(shè)計(jì)
二、API函數(shù)
STM32有多種類型的庫,本節(jié)所介紹的STM32的GPIO函數(shù)接口是STM32標(biāo)準(zhǔn)庫的函數(shù)接口,接口總共分為4種類型,如圖2所示。
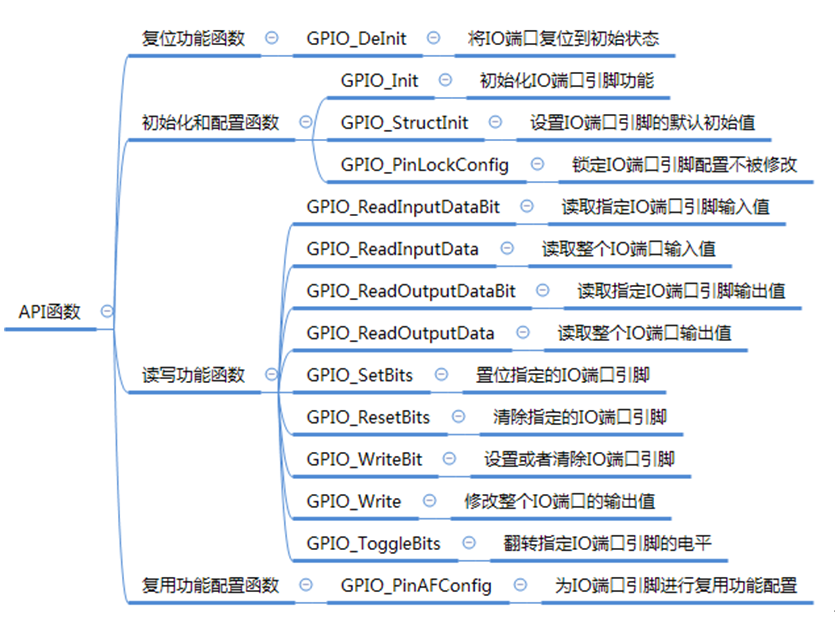
圖2 GPIO庫函數(shù)接口分類
1、關(guān)鍵參數(shù)
在詳細(xì)介紹各個(gè)API函數(shù)接口功能之前,我們需要對(duì)函數(shù)接口中使用到的關(guān)鍵的幾個(gè)參數(shù)進(jìn)行分析。
(1)、GPIO_TypeDef GPIOx *
這個(gè)參數(shù)是用于指定需要具體的GPIO端口號(hào)定義,參數(shù)的范圍為GPIOA~GPIOK。
(2)、GPIO_InitTypeDef GPIO_InitStruct *
這個(gè)參數(shù)是GPIO端口需要初始化的功能參數(shù)的結(jié)構(gòu)體指針,下面我們看看這個(gè)結(jié)構(gòu)體的定義。
typedef struct
{
uint32_t GPIO_Pin; //GPIO端口的引腳
GPIOMode_TypeDef GPIO_Mode; //GPIO的端口模式
GPIOSpeed_TypeDef GPIO_Speed; //GPIO的輸出速度頻率
GPIOOType_TypeDef GPIO_OType; //GPIO輸出時(shí)的類型
GPIOPuPd_TypeDef GPIO_PuPd; //GPIO上下拉電阻設(shè)置
}GPIO_InitTypeDef;
(a)、GPIO端口的引腳:可選范圍為GPIO_Pin_0~GPIO_Pin_15,也可以選所有引腳GPIO_Pin_All。
(b)、GPIO的端口模式:用于設(shè)置GPIO的端口模式,可選的端口模式如下。
typedef enum
{
GPIO_Mode_IN = 0x00, //普通IO口輸入
GPIO_Mode_OUT = 0x01, //普通IO口輸出
GPIO_Mode_AF = 0x02, //管腳復(fù)用功能
GPIO_Mode_AN = 0x03 //模擬輸入,用于ADC功能
}GPIOMode_TypeDef;
(c)、GPIO的輸出速度頻率:當(dāng)GPIO引腳用于普通功能輸出或復(fù)用功能輸出時(shí),GPIO的輸出速度頻率,可選的輸出速率如下。
typedef enum
{
GPIO_Low_Speed = 0x00, //GPIO_Speed_2MHz
GPIO_Medium_Speed = 0x01, //GPIO_Speed_25MHz
GPIO_Fast_Speed = 0x02, //GPIO_Speed_50MHz
GPIO_High_Speed = 0x03 //GPIO_Speed_100MHz
}GPIOSpeed_TypeDef;
速度高的IO耗電大、噪聲也大,速度低的IO耗電小、噪聲也小。使用合適的速度可以降低功耗和噪聲。高頻的驅(qū)動(dòng)電路,噪聲也高,當(dāng)不需要高的輸出頻率時(shí),請(qǐng)選用低頻驅(qū)動(dòng)電路,這樣非常有利于提高系統(tǒng)的EMI性能,也可以降低功耗。當(dāng)然如果要輸出較高頻率的信號(hào),但卻選用了較低頻率的速度,很可能會(huì)得到失真的輸出信號(hào)。關(guān)鍵是GPIO的引腳速度跟應(yīng)用匹配。
(d)、GPIO輸出時(shí)的類型:當(dāng)GPIO引腳用于普通功能輸出或復(fù)用功能輸出時(shí),可選擇設(shè)置的GPIO的輸出結(jié)構(gòu)類型有如下。
typedef enum
{
GPIO_OType_PP = 0x00, //推挽結(jié)構(gòu)
GPIO_OType_OD = 0x01 //開漏結(jié)構(gòu)
}GPIOOType_TypeDef;
推挽輸出時(shí),可以輸出高或者低電平;開漏輸出時(shí),如果要輸出高電平,則需要在芯片內(nèi)部配置上拉電阻(弱上拉)或者在芯片IO外部連接上拉電阻。
(e)、GPIO上下拉電阻設(shè)置:可以為GPIO端口的引腳選擇設(shè)置是否具備帶上拉或下拉電阻功能。
typedef enum
{
GPIO_PuPd_NOPULL = 0x00, //無上拉或者下拉
GPIO_PuPd_UP = 0x01, //帶上拉電阻
GPIO_PuPd_DOWN = 0x02 //帶下拉電阻
}GPIOPuPd_TypeDef;
STM32芯片GPIO的上拉電阻和下拉電阻最小值,典型值和最大值如下:
(3)、uint16_t GPIO_PinSource和uint8_t GPIO_AF
這兩個(gè)參數(shù)都是GPIO端口引腳需要配置成復(fù)用功能引腳用到的參數(shù)。
GPIO_PinSource:指需配置的復(fù)用功能引腳源,可選范圍GPIO_PinSource0
~GPIO_PinSource15。
GPIO_AF:指該引腳具體需要配置的功能,具體配置功能要看實(shí)際應(yīng)用需求,例如需要配置成SPI1功能的引腳,那么就選GPIO_AF_SPI1。
2、函數(shù)接口
下面就對(duì)具體的函數(shù)接口進(jìn)行逐個(gè)的介紹。由于使用的是STM32的標(biāo)準(zhǔn)庫,GPIO 相關(guān)的函數(shù)及配置定義和可以調(diào)用的接口放置在官方提供的標(biāo)準(zhǔn)庫文件 stm32fxx_gpio.c和頭文件 stm32fxx_gpio.h 文件中。
(1)、void GPIO_DeInit(GPIO_TypeDef GPIOx); *
作用:將GPIO端口設(shè)置成初始的默認(rèn)狀態(tài),相當(dāng)于復(fù)位GPIO端口,默認(rèn)的狀態(tài)為輸入浮空的狀態(tài)。
舉例:GPIO_DeInit(GPIOA),將GPIOA端口所有引腳復(fù)位到默認(rèn)狀態(tài)。
(2)、void GPIO_Init(GPIO_TypeDef GPIOx, GPIO_InitTypeDef GPIO_InitStruct);**
作用:將GPIO端口引腳進(jìn)行功能狀態(tài)初始化。
舉例:將GPIOA的pin1引腳設(shè)為普通輸出功能,IO驅(qū)動(dòng)速率可達(dá)50MHz,推挽模式,帶上拉電阻。
gpio_InitStruct.GPIO_Pin = GPIO_Pin_1;
gpio_InitStruct. GPIO_Mode = GPIO_Mode_OUT;
gpio_InitStruct.GPIO_Speed = GPIO_Fast_Speed;
gpio_InitStruct. GPIO_OType = GPIO_OType_PP;
gpio_InitStruct.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_Init(GPIOA, &gpio_InitStruct);
(3)、void GPIO_StructInit(GPIO_InitTypeDef GPIO_InitStruct); *
作用:獲取GPIO端口的所有引腳的一個(gè)默認(rèn)狀態(tài),可應(yīng)用于某個(gè)GPIO端口上。該函數(shù)內(nèi)部默認(rèn)的引腳默認(rèn)狀態(tài)如下。
GPIO_InitStruct- >GPIO_Pin = GPIO_Pin_All;
GPIO_InitStruct- >GPIO_Mode = GPIO_Mode_IN;
GPIO_InitStruct- >GPIO_Speed = GPIO_Speed_2MHz;
GPIO_InitStruct- >GPIO_OType = GPIO_OType_PP;
GPIO_InitStruct- >GPIO_PuPd = GPIO_PuPd_NOPULL;
舉例:使用gpio_InitStruct快速獲取到了引腳的默認(rèn)狀態(tài)值。
GPIO_StructInit(&gpio_InitStruct);
(4)、void GPIO_PinLockConfig(GPIO_TypeDef GPIOx, uint16_t GPIO_Pin); *
作用:將指定GPIO端口引腳當(dāng)前的配置進(jìn)行鎖定,鎖定后該引腳配置不能被修改,只有等下次MCU復(fù)位鎖定才能釋放。
舉例:鎖定GPIOA的管腳pin1配置不被修改。
GPIO_PinLockConfig(GPIOA, GPIO_Pin_1);
(5)、uint8_t GPIO_ReadInputDataBit(GPIO_TypeDef GPIOx, uint16_t GPIO_Pin); *
作用:為當(dāng)GPIO的相應(yīng)管腳配置成輸入時(shí),讀取該GPIO端口下的相應(yīng)引腳輸入電平值。
舉例:讀取GPIOA的pin1引腳輸入電平值。
status = GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_1);
(6)、uint16_t GPIO_ReadInputData(GPIO_TypeDef GPIOx); *
作用:為當(dāng)GPIO配置成輸入時(shí),讀取該GPIO端口下的所有引腳輸入電平值。
舉例:讀取GPIOA端口所有引腳的輸入電平值。
status = GPIO_ReadInputData(GPIOA);
(7)、uint8_t GPIO_ReadOutputDataBit(GPIO_TypeDef GPIOx, uint16_t GPIO_Pin); *
作用:為當(dāng)GPIO的相應(yīng)管腳配置成輸出時(shí),讀取該GPIO端口下的相應(yīng)引腳輸出電平值。
舉例:讀取GPIOA的pin1引腳輸出電平值。
status = GPIO_ReadOutputDataBit(GPIOA, GPIO_Pin_1);
(8)、uint16_t GPIO_ReadOutputData(GPIO_TypeDef GPIOx); *
作用:為當(dāng)GPIO配置成輸出時(shí),讀取該GPIO端口下的所有引腳輸出電平值。
舉例:讀取GPIOA端口所有引腳的輸出電平值。
status = GPIO_ReadOutputData(GPIOA);
(9)、void GPIO_SetBits(GPIO_TypeDef GPIOx, uint16_t GPIO_Pin); *
作用:置位相應(yīng)GPIO端口引腳的電平值。
舉例:將GPIOA的pin1管腳電平置為1。
GPIO_SetBits(GPIOA, GPIO_Pin_1);
也可以用于多個(gè)引腳電平的置位,
GPIO_SetBits(GPIOA, GPIO_Pin_1|GPIO_Pin_2|GPIO_Pin_3);
(10)、void GPIO_ResetBits(GPIO_TypeDef GPIOx, uint16_t GPIO_Pin); *
作用:清零相應(yīng)GPIO端口引腳的電平值。
舉例:將GPIOA的pin1管腳電平置為0,
GPIO_ResetBits(GPIOA, GPIO_Pin_1);
也可以用于多個(gè)引腳電平的清零。
GPIO_ResetBits(GPIOA, GPIO_Pin_1|GPIO_Pin_2|GPIO_Pin_3);
(11)、void GPIO_WriteBit(GPIO_TypeDef GPIOx, uint16_t GPIO_Pin, BitAction BitVal); *
作用:將GPIO端口的指定管腳電平置1或置0。
舉例:將GPIOA的pin1管腳電平置為1。
GPIO_WriteBit(GPIOA, GPIO_Pin_1, 1);
也可以用于多個(gè)引腳電平操作。
GPIO_WriteBit(GPIOA, GPIO_Pin_1|GPIO_Pin_2|GPIO_Pin_3, 1)
(12)、void GPIO_Write(GPIO_TypeDef GPIOx, uint16_t PortVal); *
作用:將GPIO端口的所有管腳電平置1或置0。
舉例:將GPIOA端口的所有管腳電平置為1。
GPIO_Write(GPIOA, 1);
(13)、void GPIO_ToggleBits(GPIO_TypeDef GPIOx, uint16_t GPIO_Pin); *
作用:翻轉(zhuǎn)指定GPIO引腳的輸出電平,即0變?yōu)?,1變?yōu)?。
舉例:翻轉(zhuǎn)GPIOA的pin1管腳電平值。
GPIO_ToggleBits(GPIOA , GPIO_Pin_1);
(14)、void GPIO_PinAFConfig(GPIO_TypeDef GPIOx, uint16_t GPIO_PinSource, uint8_t GPIO_AF); *
作用:將GPIO的指定管腳配置成復(fù)用功能管腳。
舉例:將GPIOA的pin9管腳配置成串口USART1的功能管腳。
GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_USART1);
三、配置流程
配置流程主要在實(shí)際的驅(qū)動(dòng)配置中對(duì)GPIO進(jìn)行初始化的操作,根據(jù)實(shí)際項(xiàng)目應(yīng)用開發(fā)中的芯片GPIO引腳的定義,進(jìn)行合理的配置。圖3所示為GPIO的基本配置操作流程。
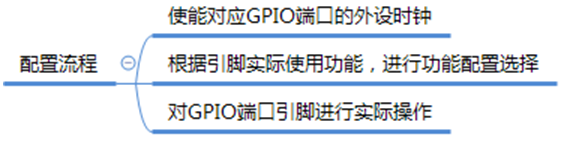
圖3 GPIO配置流程
(1)、使能對(duì)應(yīng)GPIO的時(shí)鐘
在配置GPIO的開始,首先需要將對(duì)應(yīng)的GPIO模塊的時(shí)鐘打開,這樣才能為GPIO工作提供動(dòng)力源,因此只有先將GPIO的時(shí)鐘打開才能使GPIO正常的工作。
關(guān)于STM32芯片內(nèi)部整體的時(shí)鐘系統(tǒng),可以回顧之前明解STM32時(shí)鐘系統(tǒng)的文章介紹。STM32的GPIO模塊是掛載在芯片內(nèi)部AHB1總線(AHB:高級(jí)高性能總線)上的外設(shè),因此就需要打開GPIO在AHB1總線上對(duì)應(yīng)的時(shí)鐘。AHB1總線上的外設(shè)時(shí)鐘開關(guān)在STM32提供的標(biāo)準(zhǔn)庫函數(shù)中通過函數(shù) RCC_AHB1PeriphClockCmd ()來實(shí)現(xiàn)的。例如調(diào)用:
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);
這樣就將GPIOA的時(shí)鐘打開,也可以同時(shí)打開多個(gè)GPIO端口的時(shí)鐘:
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA|RCC_AHB1Periph_GPIOB, ENABLE);
(2)、引腳功能配置
接下來對(duì)GPIO引腳的配置是需要根據(jù)實(shí)際的項(xiàng)目應(yīng)用要求,根據(jù)各個(gè)芯片管腳的定義來對(duì)引腳的功能進(jìn)行合理的配置,主要是根據(jù)引腳是使用成普通IO輸出還是輸入,復(fù)用功能還是模擬管腳來調(diào)用GPIO_Init()函數(shù)進(jìn)行配置。舉例說明:
用于普通IO輸出時(shí):
GPIO_WriteBit(GPIOA, GPIO_Pin_1, 1);//向引腳輸出0或1電平,在GPIO_Init前調(diào)用
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1;//設(shè)置使用引腳
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;//普通IO輸出
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//根據(jù)實(shí)際應(yīng)用配置輸出結(jié)構(gòu)類型
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//根據(jù)實(shí)際應(yīng)用配置輸出速度
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//根據(jù)實(shí)際應(yīng)用配置上拉或下拉電阻
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化PA1引腳
需要注意的是,初始化輸出電平時(shí),需要先調(diào)用寫引腳電平接口,再做初始化操作,這是因?yàn)镚PIO_WriteBit是將輸出的值寫入寄存器輸出置位/復(fù)位寄存器BSRR,BSRR寄存器復(fù)位值是0,GPIO_Init相當(dāng)于將GPIO引腳初始化完打開輸出開關(guān)。如果需要輸出的是高電平,GPIO_WriteBit在前,GPIO_Init在后相當(dāng)于在沒打開開關(guān)之前就將1在BSRR中放置好,GPIO_Init將開關(guān)一打開就可以輸出高電平;如果GPIO_Init在前,GPIO_WriteBit在后,GPIO_Init完會(huì)將BSRR中的0先輸出,過了一個(gè)函數(shù)指令周期后調(diào)用GPIO_WriteBit才輸出高電平,因此若驅(qū)動(dòng)時(shí)序?qū)瘮?shù)指令周期敏感的外圍器件時(shí),可能帶來驅(qū)動(dòng)時(shí)序問題!
用于普通IO輸入時(shí):
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1;//設(shè)置使用引腳
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN;//普通IO輸入
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//根據(jù)實(shí)際應(yīng)用配置輸出速度
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//根據(jù)實(shí)際應(yīng)用配置上拉或下拉電阻
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化PA1引腳
用于復(fù)用功能時(shí):
在管腳應(yīng)用于復(fù)用功能時(shí),需要調(diào)用GPIO_PinAFConfig()接口來將管腳配置成具體的外設(shè)管腳。
GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_USART1); //PA9 復(fù)用為 USART1
GPIO_PinAFConfig(GPIOA,GPIO_PinSource10,GPIO_AF_USART1); //PA10復(fù)用為USART1
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9 | GPIO_Pin_10; //設(shè)置使用引腳
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//復(fù)用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //根據(jù)實(shí)際應(yīng)用配置輸出速度
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //根據(jù)實(shí)際應(yīng)用配置輸出結(jié)構(gòu)類型
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //根據(jù)實(shí)際應(yīng)用配置上拉或下拉電阻
GPIO_Init(GPIOA,&GPIO_InitStructure); //初始化PA9和PA10引腳
用于模擬管腳時(shí):
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;//PA5 通道 5
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AN;//模擬輸入
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL ;//不帶上下拉
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化PA5引腳
當(dāng)STM32需要進(jìn)行 AD( 模數(shù) ) 轉(zhuǎn)換采樣時(shí),需要把引腳設(shè)置為模擬輸入模式,模擬輸入模式下,不需要連接上拉和下拉電阻,因?yàn)镚PIO用于模擬功能時(shí),引腳的上、下拉電阻是不起作用的。這個(gè)時(shí)候即使在配置了上拉或下拉電阻,也不會(huì)影響到模擬信號(hào)的輸入。
(3)、對(duì)GPIO引腳進(jìn)行操作
在初始化完GPIO引腳的具體配置后,就可以對(duì)GPIO引腳進(jìn)行具體的操作使用了。
用于普通IO輸出時(shí):
可以調(diào)用相關(guān)GPIO相關(guān)寫操作接口對(duì)引腳進(jìn)行輸出0或者1的操作:GPIO_SetBits、GPIO_ResetBits、GPIO_WriteBit、GPIO_ToggleBits。
也可以調(diào)用相關(guān)GPIO讀接口對(duì)輸出類型的GPIO進(jìn)行讀取引腳電平的操作GPIO_ReadOutputDataBit。
用于普通IO輸入時(shí):
可以調(diào)用相關(guān)GPIO讀接口對(duì)輸入類型的GPIO進(jìn)行讀取引腳電平的操作:GPIO_ReadInputDataBit。
用于復(fù)用功能時(shí):
需要根據(jù)實(shí)際使用時(shí)的具體外設(shè)配置,接著初始化相應(yīng)的片上外設(shè)后,調(diào)用具體的外設(shè)信號(hào)讀或者寫接口進(jìn)行信號(hào)的讀寫操作。
用于模擬管腳時(shí):
由于模擬管腳功能是用芯片上的ADC對(duì)芯片外部的模擬信號(hào)進(jìn)行采樣,因此還需要初始化完ADC外設(shè)后,調(diào)用ADC外設(shè)采樣的接口進(jìn)行信號(hào)讀取。
四、使用技巧
在日常程序開發(fā)調(diào)試的過程中,可以簡(jiǎn)單有效的利用GPIO驅(qū)動(dòng)輸出高低電平來進(jìn)行輔助的測(cè)試及驗(yàn)證工作。下面介紹幾個(gè)較為常用的使用場(chǎng)景,如果有其它可以利用GPIO的方法和技巧,也請(qǐng)大家積極留言,我們一起探討。
(1)、在boot程序階段使用IO翻轉(zhuǎn)輸出信號(hào)的頻率可以和APP程序階段使用IO翻轉(zhuǎn)輸出信號(hào)的頻率相異,通過使用示波器測(cè)量波形,用于區(qū)分程序是運(yùn)行在boot程序階段還是APP程序階段,即不同程序階段。
(2)、在使用定時(shí)器中斷的時(shí)候,為了確保定時(shí)器時(shí)基設(shè)置的正確性,測(cè)試是可以定時(shí)器中斷中增加IO口信號(hào)翻轉(zhuǎn)邏輯,通過使用示波器測(cè)量翻轉(zhuǎn)的頻率來測(cè)試驗(yàn)證定時(shí)器中斷的周期。
void TIM1_IRQHandler(void) //定時(shí)器 1 中斷服務(wù)函數(shù)
{
if(TIM_GetITStatus(TIM1,TIM_IT_Update)==SET) //溢出中斷
{
GPIO_ToggleBits(); //IO口信號(hào)翻轉(zhuǎn)操作邏輯,用于驗(yàn)證定時(shí)器中斷頻率
}
TIM_ClearITPendingBit(TIM1,TIM_IT_Update); //清除中斷標(biāo)志位
}
(3)、在不同的程序段中使用多個(gè)IO,輸出高電平,通過示波器測(cè)量IO口之間輸出高電平的間隔,可以確定兩個(gè)程序段之間運(yùn)行的準(zhǔn)確時(shí)間。
(4)、在板卡上沒有LED進(jìn)行閃爍指示的情況或沒有使用外部看門狗芯片的情況下,為了確認(rèn)程序是否仍然在正常運(yùn)行,需要留出一個(gè)IO口,用于翻轉(zhuǎn)高低電平輸出,后續(xù)就可以用示波器測(cè)量該信號(hào)的有無來判斷程序是否死機(jī)。
(5)、在沒有調(diào)試打印程序信息的串口時(shí),查找死機(jī)問題的時(shí)候,放置不同的IO輸出高電平的在不同的程序段,這樣類似的進(jìn)行插樁驅(qū)動(dòng)測(cè)試,通過示波器測(cè)量信號(hào),可以大體的定位在程序運(yùn)行的哪一塊發(fā)生了死機(jī)的問題。
(6)、在測(cè)試驗(yàn)證階段,可以將某個(gè)IO引腳配置成輸入模式,利用外部給的激勵(lì)信號(hào),在程序中判斷讀到的信號(hào)電平的高低狀態(tài),去作為邏輯判斷條件進(jìn)行一些代碼段的驗(yàn)證測(cè)試。
五、總結(jié)
本篇主要主要是對(duì)STM32的GPIO在日常基本應(yīng)用開發(fā)中的具體的操作配置和使用方法進(jìn)行了說明,包括API功能函數(shù)的定義,驅(qū)動(dòng)初始化的配置流程以及一些利用GPIO操作的相關(guān)技巧,后續(xù)將對(duì)GPIO使用成外部中斷時(shí)進(jìn)行詳細(xì)的介紹。
-
STM32
+關(guān)注
關(guān)注
2266文章
10871瀏覽量
354787 -
函數(shù)
+關(guān)注
關(guān)注
3文章
4304瀏覽量
62427 -
GPIO
+關(guān)注
關(guān)注
16文章
1196瀏覽量
51914
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
STM32 GPIO的API函數(shù)配置和使用技巧

STM32的GPIO操作配置和使用方法
使用STM32 HAL庫進(jìn)行GPIO控制的實(shí)例
《振南電子STM32視頻教程》第七講:STM32的GPIO和AFIO的配置和應(yīng)用

STM32低功耗模式下GPIO如何配置最節(jié)能?

STM32CubeMX配置GPIO與USB簡(jiǎn)介
STM32庫函數(shù)開發(fā)-GPIO
關(guān)于STM32 GPIO的配置等問題
STM32低功耗開發(fā)時(shí),需要注意的GPIO配置問題





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論