") 如何制作一個2自由度并聯(lián)仿生腿?
如何制作一個2自由度并聯(lián)仿生腿?
1. 運動功能說明
本文實例將實現(xiàn)2自由度并聯(lián)仿生腿模組運動起來,模擬實現(xiàn)狗腿行走的動作。
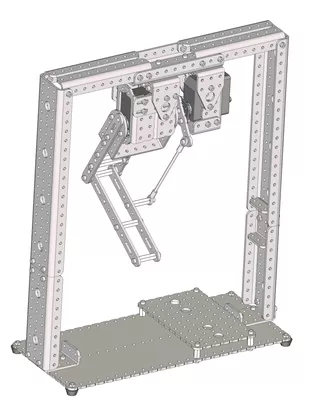
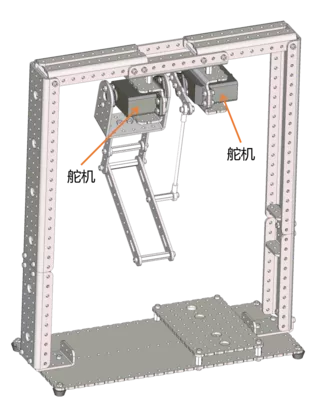
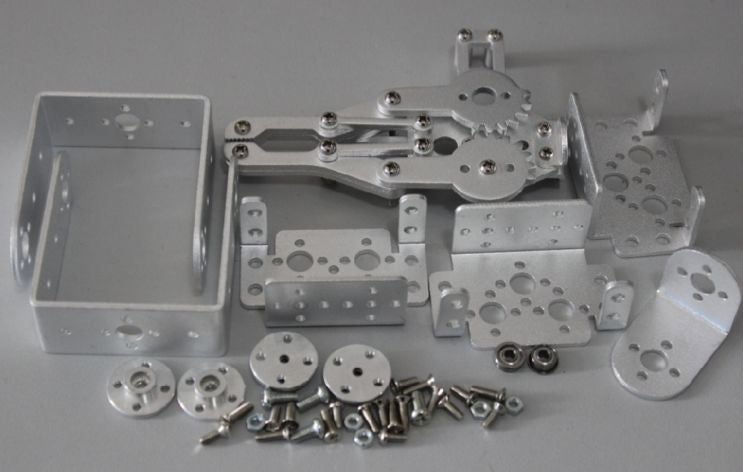
2. 結(jié)構(gòu)說明
2自由度并聯(lián)仿生腿模組是由兩個舵機驅(qū)動的,它的所有動作都將在兩個舵機的配合運動下實現(xiàn)。
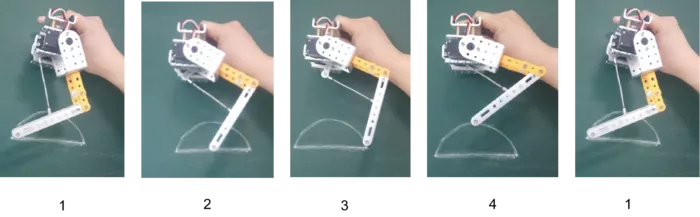
3. 運動原理說明
2自由度并聯(lián)仿生腿模組運動的點位如下圖所示:

在這個示例中,我們采用了以下硬件,請大家參考:
| 主控板 | Basra主控板(兼容Arduino Uno)? |
| 擴展板 | Bigfish2.1擴展板? |
| 電池 | 7.4V鋰電池 |
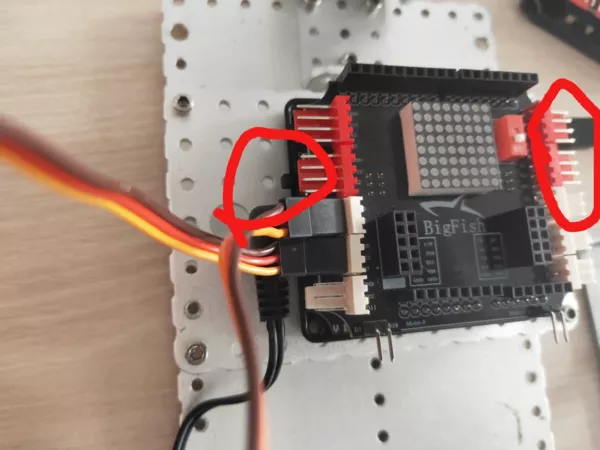
電路連接:將2個舵機連接在Bigfish擴展板的D4、D7端口。
5. 運動功能實現(xiàn)
上位機:Controller 1.0
下位機編程環(huán)境:Arduino 1.8.19
實現(xiàn)思路:實現(xiàn)2自由度并聯(lián)仿生腿模組運動起來。
5.1 舵機角度的確定
將2自由度并聯(lián)仿生腿模組用工具調(diào)整至合適的點位后,用量角器測量出相應(yīng)的舵機角度值。模擬狗腿行走的動作,對每個動作的角度進行測量并記錄數(shù)據(jù)。
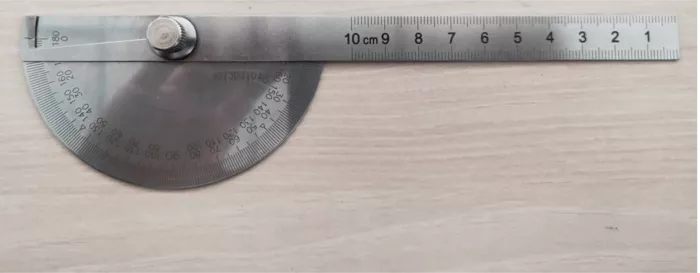
操作步驟:① 以固定舵機的兩個螺絲為固定量角器位置。
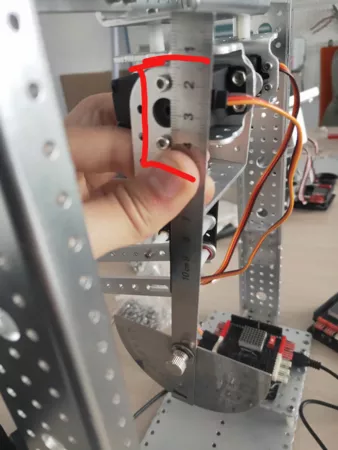
② 擰緊螺絲,防止取下量角器時角度發(fā)生變化,導(dǎo)致測量的不夠準確。

③ 對量角器進行讀數(shù)并進行數(shù)據(jù)記錄。

④ 利用Controller動作編輯軟件,輸入測量到的角度值進行嘗試,如果動作和實際有偏差的話可改變角度參數(shù)進行調(diào)整,直至得到正確的舵機角度組合為止。關(guān)于Controller動作編輯軟件的使用方法,可參考【U002】如何驅(qū)動模擬舵機-Controller 1.0b軟件的使用【https://www.robotway.com/h-col-129.html】

5.2 示例程序
下面提供一個2自由度并聯(lián)仿生腿模組運動的參考例程(tuibuyundong.ino),程序源代碼及模組3D文件詳見 https://www.robotway.com/h-col-239.html :
/*------------------------------------------------------------------------------------ 版權(quán)說明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved. Distributed under MIT license.See file LICENSE for detail or copy at https://opensource.org/licenses/MIT by 機器譜 2023-06-02 https://www.robotway.com/ ------------------------------*/ #include #define upper_servo_initialangle 90 #define lower_servo_initialangle 90 Servo upper_servo; //大腿舵機 Servo lower_servo; //小腿舵機 void setup() { upper_servo.attach(4); lower_servo.attach(7); upper_servo.write(upper_servo_initialangle); lower_servo.write(lower_servo_initialangle); delay(1000); } void loop() { //大腿動一下 for(int i=0;i0;j--) { upper_servo.write(upper_servo_initialangle+j); delay(100); } //小腿動一下 for(int i=0;i0;j--) { lower_servo.write(lower_servo_initialangle+j); delay(100); } }
審核編輯黃宇
-
舵機
+關(guān)注
關(guān)注
17文章
265瀏覽量
40960 -
2自由度
+關(guān)注
關(guān)注
0文章
3瀏覽量
1176
發(fā)布評論請先 登錄
相關(guān)推薦
4自由度并聯(lián)機器狗實現(xiàn)下蹲功能

基于STM32、以太網(wǎng)、Labview的六自由度Stewart并聯(lián)運動平臺模型
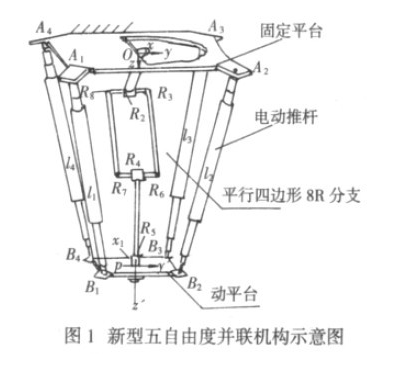
運用BLDC設(shè)計新型五自由度并聯(lián)機器人的方案分享
反螺旋理論與五自由度并聯(lián)機器人設(shè)計方法
并聯(lián)機器人的少自由度并聯(lián)機構(gòu)設(shè)計
分享最好的機械臂是7個自由度的原因

運用BLDC對新型五自由度并聯(lián)機器人的設(shè)計
為什么最好的機械臂是7個自由度而不是6個自由度
關(guān)于BLDC 的新型五自由度并聯(lián)機器人運動控制
淺談工業(yè)機器人自由度
基于Simulink的汽車2自由度模型
多自由度仿生假手嵌入式控制系統(tǒng)及其抓取策略






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論