") 電動(dòng)汽車(chē)用分裂繞組永磁同步電機(jī)設(shè)計(jì)
電動(dòng)汽車(chē)用分裂繞組永磁同步電機(jī)設(shè)計(jì)
作者:翟秀果,李毅拓,鄭 權(quán)丨河南森源重工有限公司
摘 要:
設(shè)計(jì)了一款新型純電動(dòng)物流車(chē)用驅(qū)動(dòng)電機(jī),定子采用分裂繞組形式,電機(jī)在低速區(qū)域工作時(shí)繞組全部接入,電機(jī)在高速區(qū)域工作時(shí)繞組部分接入,以替代機(jī)械式兩檔變速箱,拓寬電機(jī)高效率工作區(qū)域。
解決電動(dòng)汽車(chē)?yán)m(xù)航里程問(wèn)題,一方面要從儲(chǔ)能電池入手,研制高儲(chǔ)能的電芯和電池管理系統(tǒng),另一方面要從電驅(qū)系統(tǒng)方面入手,研制高效節(jié)能的電機(jī)和電控系統(tǒng)。本文主要研究電機(jī)的高效節(jié)能性,以一款200 kW永磁同步電機(jī)為例,探討分裂繞組定子和交直軸電感優(yōu)化對(duì)電機(jī)高效率特性的貢獻(xiàn)。
永磁同步電機(jī)轉(zhuǎn)子上沒(méi)有銅耗,相對(duì)于異步電機(jī)效率較高,電動(dòng)汽車(chē)廠家在電驅(qū)系統(tǒng)中越來(lái)越傾向于使用永磁同步電機(jī)。傳統(tǒng)電機(jī)定子繞組為固定匝數(shù),因?yàn)殡姍C(jī)感應(yīng)電動(dòng)勢(shì)和轉(zhuǎn)速成正比,所以永磁電機(jī)在高速時(shí)必須進(jìn)行弱磁控制,以免感應(yīng)電勢(shì)過(guò)高擊穿開(kāi)關(guān)器件,即永磁電機(jī)在高速時(shí)有相當(dāng)一部分電流是起到反向弱磁功能,并不提供轉(zhuǎn)矩,該部分弱磁電流在定子中同樣存在銅耗。
為了解決這一問(wèn)題,部分廠商采用兩檔變速箱的結(jié)構(gòu),在車(chē)輛高速行駛時(shí)用切換齒輪的方法降低電機(jī)轉(zhuǎn)速,以此來(lái)降低電機(jī)的感應(yīng)電動(dòng)勢(shì),但該結(jié)構(gòu)增加了變速箱后電驅(qū)系統(tǒng)的體積和成本。本文采用分裂繞組的定子結(jié)構(gòu),從根本上解決永磁同步電機(jī)寬轉(zhuǎn)速運(yùn)行的弱磁問(wèn)題,電機(jī)定子繞組分段引出,在低速區(qū)域運(yùn)行時(shí)繞組全部接入工作,保證電機(jī)恒轉(zhuǎn)矩輸出;在高速區(qū)域運(yùn)行時(shí)繞組部分接入工作,定子磁鏈減小,所需弱磁電流降低,保證電機(jī)恒功率輸出。
1 動(dòng)力匹配及電機(jī)性能
1.1 計(jì)算電機(jī)外特性曲線
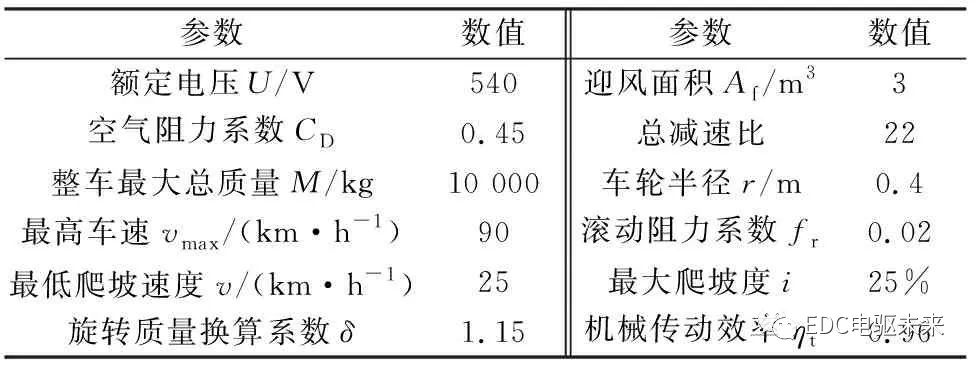
本文所研究的永磁同步電機(jī)擬用作物流車(chē)的驅(qū)動(dòng)電機(jī),物流車(chē)相關(guān)動(dòng)力需求參數(shù)如表1所示。
表1 電動(dòng)物流車(chē)動(dòng)力需求參數(shù)
物流車(chē)最大需求功率出現(xiàn)在滿載時(shí)的爬坡路段,根據(jù)最大爬坡功率計(jì)算式[4]:

(1)
計(jì)算爬坡路段所需驅(qū)動(dòng)電機(jī)峰值功率Pr=150 kW,計(jì)算爬坡時(shí)電機(jī)轉(zhuǎn)速
3 650 r/min,再由公式:
(2)
計(jì)算電機(jī)恒轉(zhuǎn)矩段峰值轉(zhuǎn)矩T=392 N·m,取T=400 N·m。
電機(jī)低速段工作在恒轉(zhuǎn)矩區(qū)域,高速段工作在恒功率區(qū)域,繪制電機(jī)需求外特性曲線如圖1所示。
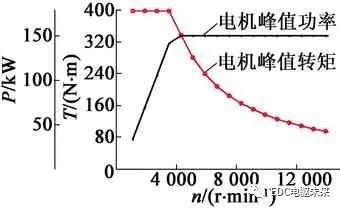
圖1 電動(dòng)物流車(chē)需求電機(jī)外特性
1.2 計(jì)算電機(jī)參數(shù)
首先用解析法根據(jù)永磁同步電機(jī)所需功率和轉(zhuǎn)矩確定電機(jī)的大致尺寸,有經(jīng)驗(yàn)公式[3]:
(3)
式中:T為電機(jī)輸出轉(zhuǎn)矩;暫取電機(jī)輸出效率η=96%;電樞繞組系數(shù)kw=0.92,水冷電機(jī)電負(fù)荷A=50 kA/m,磁負(fù)荷B=0.8 T,根據(jù)車(chē)輛底盤(pán)安裝空間估算電機(jī)的有效長(zhǎng)度le=0.15 m。
根據(jù)需求T=400 N·m,計(jì)算定子內(nèi)徑Dsi=0.22 m。
取定子裂比0.66,定子外徑Dso=330 mm。
根據(jù)公式:
(4)
確定定子槽面積As,取槽滿率kp=0.7,定子槽數(shù)Ns=48,電流密度J=15 A/mm2。
進(jìn)一步根據(jù)公式:

(5)
確定定子軛厚度hc和定子齒寬ωt尺寸,定子采用平行齒結(jié)構(gòu)。
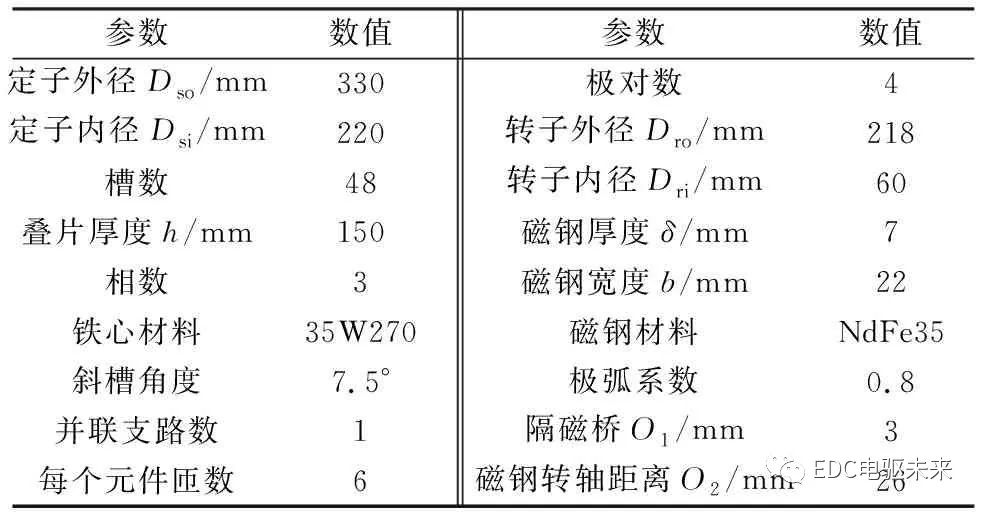
用相關(guān)數(shù)值在Maxwell軟件中進(jìn)行2D建模,并進(jìn)行電磁優(yōu)化計(jì)算,得到電機(jī)基本參數(shù),電機(jī)二維模型如圖2所示,具體電機(jī)參數(shù)如表2所示。
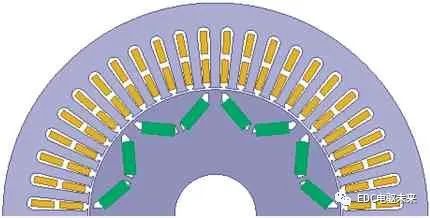
圖2 150 kW永磁同步電機(jī)1/2模型圖
表2 電機(jī)參數(shù)
計(jì)算得到電機(jī)輸出峰值狀態(tài)功率和轉(zhuǎn)矩,如圖3所示。圖3中,三角標(biāo)志線為峰值轉(zhuǎn)矩,叉線為峰值功率,可以看出電機(jī)性能滿足車(chē)輛動(dòng)力需求。
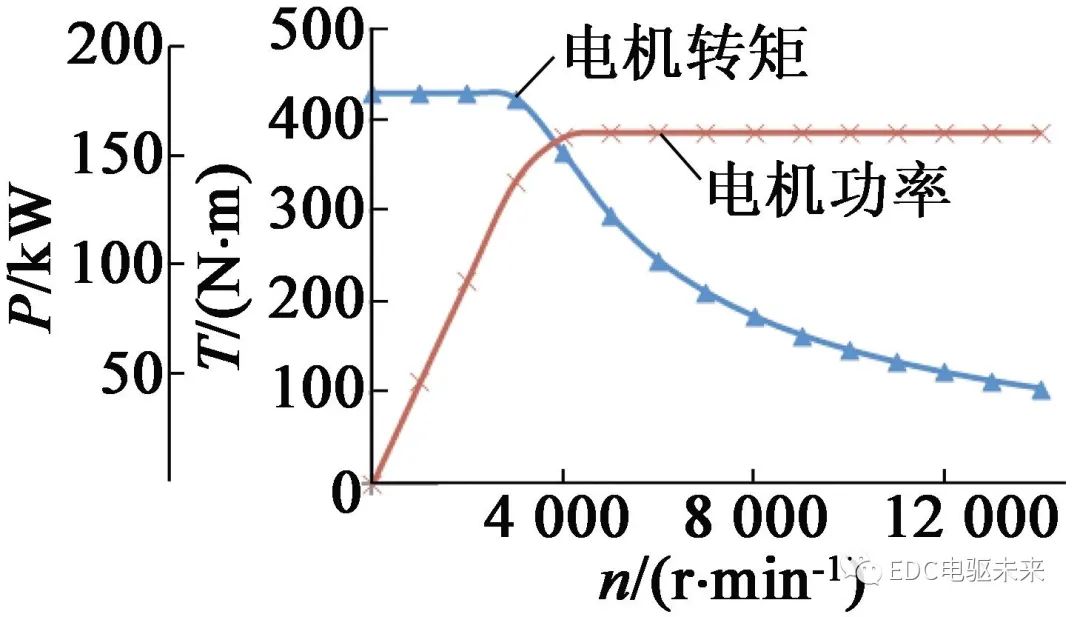
圖3 電機(jī)外特性曲線
進(jìn)一步計(jì)算電機(jī)的電流曲線如圖4所示。圖4中,平滑曲線為定子相電流is曲線,三角線為交軸電流iq曲線,叉線為直軸電流-id曲線。計(jì)算電機(jī)的效率map如圖5所示。
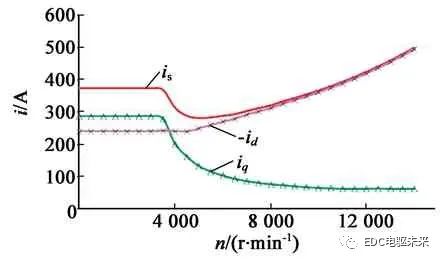
圖4 電機(jī)電流曲線
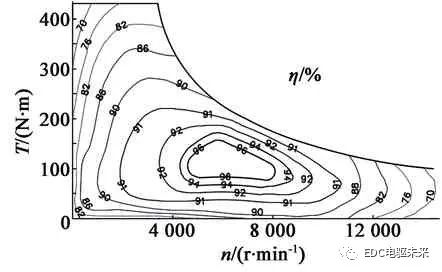
圖5 電機(jī)效率map
從圖4可以看出,電機(jī)在低速恒轉(zhuǎn)矩區(qū)需要380 A的電流,隨著轉(zhuǎn)速升高,進(jìn)入恒功率區(qū)域后電流先降再升,到達(dá)10 000 r/min之后,在高速區(qū)域電流逐漸超過(guò)了恒轉(zhuǎn)矩段電流。這是因?yàn)殡娏骺梢苑纸鉃閮刹糠郑峁┺D(zhuǎn)矩的交軸電流iq和弱磁電流-id,在低速區(qū)域,電機(jī)感應(yīng)電動(dòng)勢(shì)低,需要的弱磁電流較小,電流大部分用來(lái)提供轉(zhuǎn)矩輸出;中速段后進(jìn)入恒功率區(qū)域,電機(jī)所需輸出轉(zhuǎn)矩降低而感應(yīng)電動(dòng)勢(shì)未超出額定電壓,電流呈現(xiàn)降低趨勢(shì);高速段后電機(jī)感應(yīng)電動(dòng)勢(shì)超出額定電壓,且隨著轉(zhuǎn)速升高進(jìn)一步升高,電機(jī)所需輸出轉(zhuǎn)矩仍然降低趨勢(shì),需要越來(lái)越多的電流參與到弱磁分量中,以至于電流超過(guò)了低速區(qū)電流。
電驅(qū)系統(tǒng)的最大伏安容量定義為電機(jī)最大工作電壓點(diǎn)的電壓Us1和電機(jī)最大工作電流點(diǎn)的電流Is2的乘積,該Us1和Is2可以不同時(shí)出現(xiàn),最大伏安容量決定著電驅(qū)系統(tǒng)的功率密度,也限制著功率元器件的選型。顯然,定子電流在高速段超過(guò)低速段,這不是電機(jī)工作的理想情況,會(huì)提高電驅(qū)系統(tǒng)的最大伏安容量,降低系統(tǒng)的功率密度;另外,高速時(shí)因?yàn)殡姍C(jī)鐵耗越來(lái)越高,再加上不斷增大的銅耗會(huì)導(dǎo)致高速段效率嚴(yán)重下降,從圖5的電機(jī)效率map可以直觀地看出電機(jī)高效區(qū)域面積很小。
2 分裂繞組設(shè)計(jì)
2.1 設(shè)計(jì)原則
為了降低電驅(qū)系統(tǒng)的最大伏安容量,同時(shí)提高電機(jī)高效率區(qū)面積,擬將本電機(jī)的定子繞組設(shè)計(jì)為分裂繞組形式,將定子繞組分兩部分組成,兩部分同槽分布,低速區(qū)域兩部分串聯(lián)同時(shí)工作,高速時(shí)切掉部分繞組來(lái)降低電機(jī)的感應(yīng)電動(dòng)勢(shì),分裂繞組電機(jī)拓?fù)浣Y(jié)構(gòu)如圖6所示。
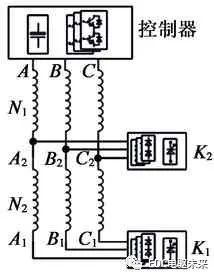
圖6 分裂繞組拓?fù)浣Y(jié)構(gòu)
定子繞組分為N1和N2兩部分,兩段之間首尾串聯(lián)并做中間引出線,三相電機(jī)的三個(gè)尾端引出線接切換開(kāi)關(guān)K1,三個(gè)中間引出線接切換開(kāi)關(guān)K2。低速時(shí)K1接通,K2斷開(kāi),電機(jī)工作繞組N=N1+N2;高速時(shí)K1斷開(kāi),K2接通,電機(jī)工作繞組N=N1。當(dāng)然,圖6為特殊的兩段式分裂結(jié)構(gòu),而分裂繞組的分段段數(shù)z不僅限于z=2,切換開(kāi)關(guān)個(gè)數(shù)等于分段段數(shù)z,具體分段段數(shù)需依照電機(jī)的弱磁調(diào)速范圍而定,并同時(shí)考慮經(jīng)濟(jì)性和可行性。
分裂繞組內(nèi)部結(jié)構(gòu)如圖7所示,以A相為例,每個(gè)六邊形為一個(gè)繞組元件,普通電機(jī)繞組的元件個(gè)數(shù)為Ns/m,即槽數(shù)除以相數(shù),而分裂繞組的元件個(gè)數(shù)為z×Ns/m,本文中電機(jī)z=2即可滿足弱磁調(diào)速需求。圖7中繞組A1-X1段每個(gè)元件的匝數(shù)為N1,繞組A2-X2段每個(gè)元件的匝數(shù)為N2,兩段繞組的元件同槽分布。
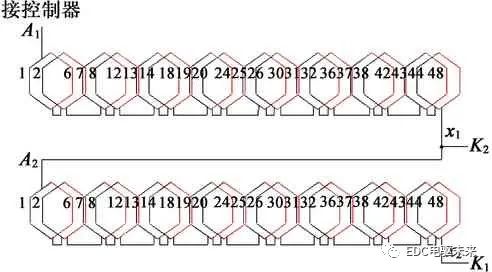
圖7 分裂繞組內(nèi)部結(jié)構(gòu)
分裂繞組的設(shè)計(jì)原則如下:
1) 繞組分段段數(shù)z需要同時(shí)考慮經(jīng)濟(jì)性和可行性,分段段數(shù)提升會(huì)導(dǎo)致切換開(kāi)關(guān)個(gè)數(shù)增加,從而增加接線盒體積,不利于成本控制。
2) 繞組分裂匝數(shù)比λ=N1/(N1+N2),λ的選取需要同時(shí)考慮低速時(shí)輸出足夠大的轉(zhuǎn)矩和高速時(shí)足夠小的感應(yīng)電動(dòng)勢(shì)。
3) 分裂轉(zhuǎn)速點(diǎn)n的選取要根據(jù)分裂匝數(shù)比而定,并同時(shí)保證繞組分裂前感應(yīng)電勢(shì)足夠小,繞組分裂后輸出轉(zhuǎn)矩足夠大。
4) 為了盡可能降低系統(tǒng)的最大伏安容量,繞組分裂前所有繞組串聯(lián)工作的電流is1和繞組分裂后僅部分繞組工作的電流is2要滿足關(guān)系is1≈is2。
5) 繞組分裂前的總匝數(shù)選取要考慮系統(tǒng)的安全電壓,即考慮切換開(kāi)關(guān)的故障模式,在所有繞組串聯(lián)情況下,電機(jī)在最大轉(zhuǎn)速時(shí)的感應(yīng)電動(dòng)勢(shì)要小于控制器件的安全電壓。
2.2 設(shè)計(jì)結(jié)果與對(duì)比分析
根據(jù)以上設(shè)計(jì)原則,利用Maxwell 2D軟件對(duì)繞組匝數(shù)、分裂轉(zhuǎn)速點(diǎn)和轉(zhuǎn)子磁鋼尺寸進(jìn)行參數(shù)化分析,計(jì)算得出分段段數(shù)z=2,分裂轉(zhuǎn)速n=6800r/min,元件匝數(shù)N1=4,N2=5,即轉(zhuǎn)速小于6800r/min時(shí)繞組工作匝數(shù)為9匝,轉(zhuǎn)速大于6800r/min時(shí)繞組工作匝數(shù)4匝。
對(duì)比分裂繞組電機(jī)和普通繞組電機(jī)的空載感應(yīng)電動(dòng)勢(shì)曲線如圖8所示。圖8中,實(shí)線為分裂繞組電機(jī)空載感應(yīng)電動(dòng)勢(shì)曲線,虛線為普通繞組電機(jī)感應(yīng)電動(dòng)勢(shì)曲線。可以看到,分裂轉(zhuǎn)速前電機(jī)感應(yīng)電動(dòng)勢(shì)斜率很大,分裂轉(zhuǎn)速后電機(jī)感應(yīng)電動(dòng)勢(shì)斜率較低,之后電機(jī)的空載感應(yīng)電動(dòng)勢(shì)遠(yuǎn)低于普通電機(jī)。
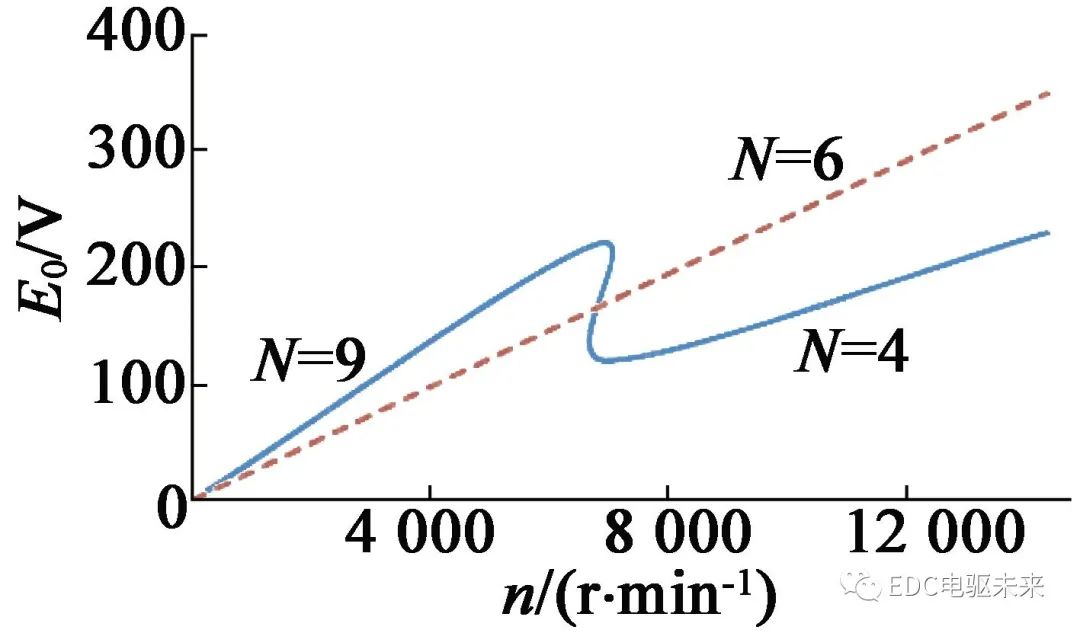
圖8 空載感應(yīng)電勢(shì)對(duì)比
分裂繞組電機(jī)的定子電流曲線如圖9和圖10所示,其中圖9為電流幅值曲線,圖10為電流相角曲線。對(duì)比圖4和圖9可以看出,高速時(shí)分裂繞組電機(jī)的電流得到有效抑制,最高速時(shí)電流不超過(guò)低速時(shí)的恒轉(zhuǎn)矩電流。
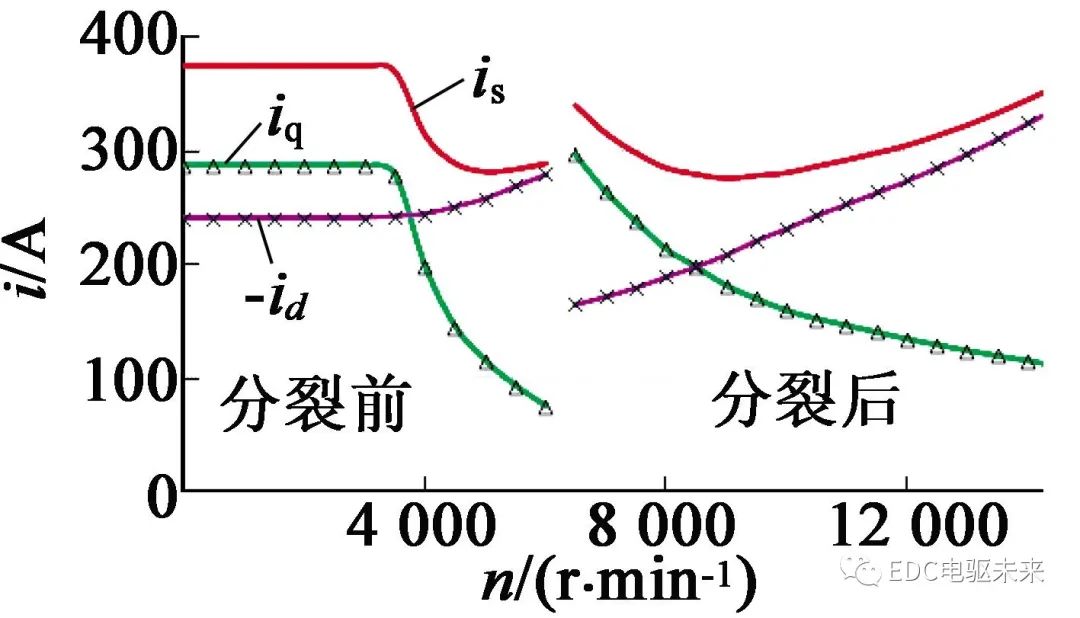
圖9 分裂繞組電機(jī)電流幅值曲線
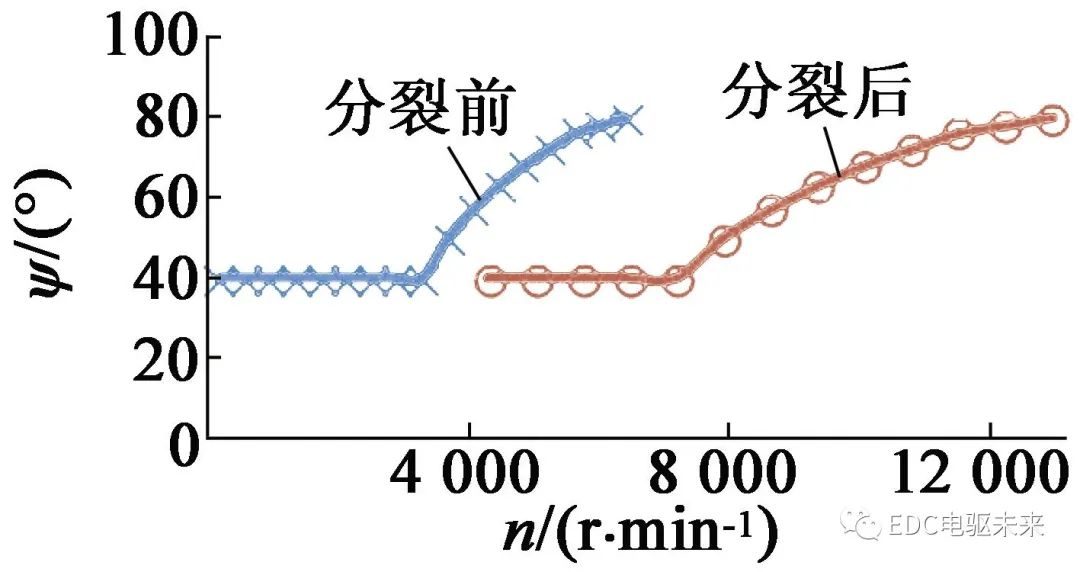
圖10 分裂繞組電機(jī)電流相角曲線
對(duì)比普通電機(jī)和分裂繞組電機(jī)最大伏安特性曲線如圖11所示。可見(jiàn),繞組采用分裂控制可以有效地降低整個(gè)系統(tǒng)的伏安容量,從而節(jié)省成本,提高系統(tǒng)的功率密度。
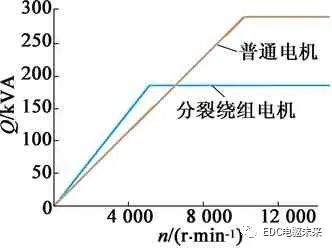
圖11 電機(jī)最大伏安容量對(duì)比
計(jì)算分裂繞組電機(jī)的輸出轉(zhuǎn)矩特性曲線,如圖12所示。圖12中,三角線為繞組分裂前轉(zhuǎn)矩曲線,虛線為繞組分裂后轉(zhuǎn)矩曲線,兩條曲線疊加之后的輪廓線可以完全覆蓋圖1的電動(dòng)物流車(chē)需求轉(zhuǎn)矩曲線。進(jìn)一步計(jì)算分裂繞組電機(jī)的效率map,如圖13所示。可見(jiàn),該電機(jī)存在兩個(gè)高效率區(qū)域,對(duì)比圖5普通電機(jī)的效率map,發(fā)現(xiàn)高效區(qū)域面積幾乎增加了一倍。
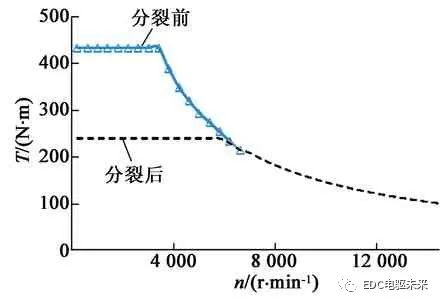
圖12 分裂繞組電機(jī)輸出特性曲線
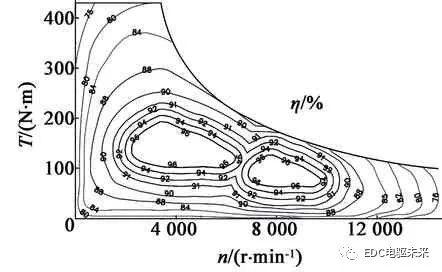
圖13 分裂繞組電機(jī)輸出效率map
3 實(shí)驗(yàn)驗(yàn)證
分裂繞組電機(jī)試驗(yàn)樣機(jī),分裂繞組電機(jī)接線盒內(nèi)部引出線,兩段式分裂繞組共計(jì)9個(gè)引出頭,其中A、B、C端接控制器輸出,A1,B1,C1和A2,B2,C2分別接切換開(kāi)關(guān)K1和K2。
將電機(jī)安裝在臺(tái)架上進(jìn)行性能測(cè)試,電機(jī)通過(guò)減速器、傳動(dòng)軸和后橋的差速器連接,后橋兩端各布置一個(gè)測(cè)功機(jī),可以模擬車(chē)輛的具體運(yùn)行狀態(tài),電機(jī)和差速器的連接。
電機(jī)測(cè)試過(guò)程中對(duì)數(shù)據(jù)進(jìn)行記錄,中控室操作界面如圖18所示。設(shè)定轉(zhuǎn)速后測(cè)功機(jī)測(cè)取轉(zhuǎn)矩值,本測(cè)試所用電機(jī)減速器變比3.07,后橋差速器減速比6.15,總計(jì)減速比18.8,界面中左右轉(zhuǎn)速和轉(zhuǎn)矩分別顯示的是兩個(gè)測(cè)功機(jī)的測(cè)量值,即代表實(shí)際車(chē)輛運(yùn)行時(shí)輪轂的轉(zhuǎn)速和轉(zhuǎn)矩,兩邊轉(zhuǎn)矩之和除以減速比即為電機(jī)輸出轉(zhuǎn)矩。
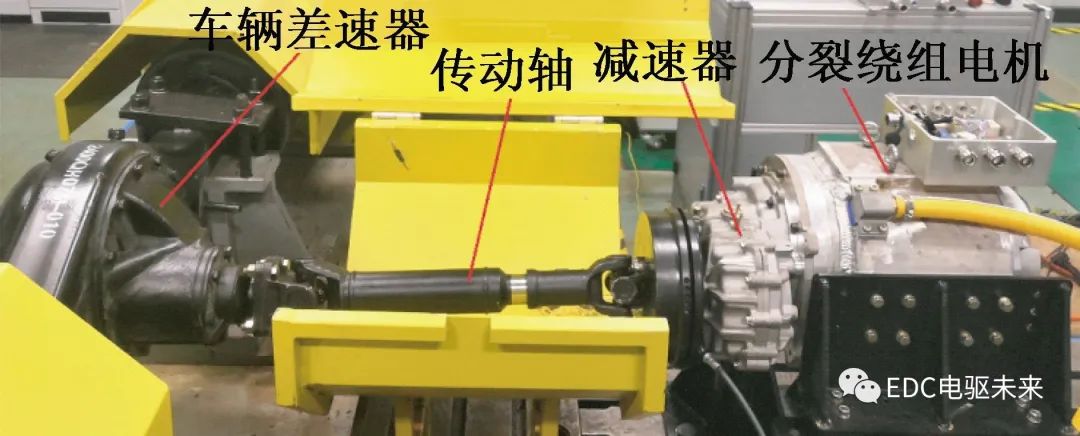
圖17 分裂繞組電機(jī)與差速器連接

圖18 電機(jī)性能測(cè)試界面
根據(jù)測(cè)試數(shù)據(jù)繪制電機(jī)實(shí)際工作效率map如圖19所示。和仿真計(jì)算一致,該圖有兩個(gè)高效率區(qū)域,不過(guò)高速區(qū)的實(shí)測(cè)效率值要大于計(jì)算值。由于測(cè)試臺(tái)架的轉(zhuǎn)速限制,測(cè)試只能進(jìn)行到12 000 r/min,根據(jù)效率分布趨勢(shì)來(lái)看,更高轉(zhuǎn)速時(shí)的實(shí)測(cè)效率值依然要大于計(jì)算值,可見(jiàn),分裂繞組電機(jī)對(duì)于效率的提高是十分見(jiàn)效的。
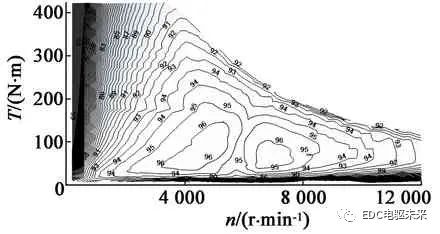
圖19 分裂繞組電機(jī)實(shí)測(cè)效率map
將電機(jī)的效率值結(jié)合電動(dòng)汽車(chē)具體蓄電池參數(shù),用ADVISOR軟件計(jì)算續(xù)航里程,計(jì)算結(jié)果如圖20所示,分裂繞組電驅(qū)動(dòng)系統(tǒng)對(duì)比普通電驅(qū)動(dòng)系統(tǒng)的電動(dòng)汽車(chē)?yán)m(xù)航里程整體提升了約30%。
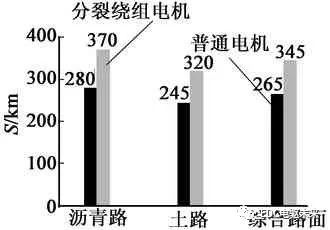
圖20 電動(dòng)汽車(chē)?yán)m(xù)航里程對(duì)比
4 結(jié) 語(yǔ)
本文以純電動(dòng)物流車(chē)用驅(qū)動(dòng)電機(jī)為應(yīng)用對(duì)象,設(shè)計(jì)并制造了一臺(tái)分裂繞組永磁同步電機(jī),通過(guò)仿真分析和實(shí)測(cè)得出以下結(jié)論:
1) 電機(jī)定子繞組采用分裂繞組形式可以額外增加電機(jī)的高效率區(qū)域,能有效地提高電驅(qū)系統(tǒng)的效率,從而延長(zhǎng)電動(dòng)車(chē)?yán)m(xù)航里程。
2) 電機(jī)定子繞組采用分裂繞組形式可以大幅降低電驅(qū)系統(tǒng)的最大伏安容量,從而減小體積、增加功率密度、降低成本。
3) 分裂繞組的設(shè)計(jì)既要考慮到電機(jī)低速大轉(zhuǎn)矩特性,又要保證電機(jī)高速時(shí)較低的感應(yīng)電動(dòng)勢(shì),需要對(duì)分裂轉(zhuǎn)速點(diǎn)和繞組分裂前后匝數(shù)比進(jìn)行優(yōu)化計(jì)算。
4) 分裂繞組電機(jī)可以根據(jù)弱磁區(qū)間的范圍靈活地選取繞組分裂段數(shù),以此來(lái)代替多檔式機(jī)械變速箱,提高電驅(qū)系統(tǒng)功率密度,并且以電切換代替機(jī)械切換,可以提高換擋靈敏度。
審核編輯:湯梓紅
-
電動(dòng)汽車(chē)
+關(guān)注
關(guān)注
156文章
11950瀏覽量
230581 -
永磁同步電機(jī)
+關(guān)注
關(guān)注
28文章
870瀏覽量
49498 -
繞組
+關(guān)注
關(guān)注
2文章
510瀏覽量
19839 -
電驅(qū)系統(tǒng)
+關(guān)注
關(guān)注
0文章
113瀏覽量
2364
原文標(biāo)題:電動(dòng)汽車(chē)用分裂繞組永磁同步電機(jī)設(shè)計(jì)
文章出處:【微信號(hào):EDC電驅(qū)未來(lái),微信公眾號(hào):EDC電驅(qū)未來(lái)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
【TL6748 DSP申請(qǐng)】基于DSP的電動(dòng)汽車(chē)永磁同步電機(jī)驅(qū)動(dòng)器的設(shè)計(jì)
詳解電動(dòng)汽車(chē)電機(jī)電控技術(shù)
電動(dòng)汽車(chē)電機(jī)電控技術(shù)解析
永磁同步電機(jī)原理、特點(diǎn)、應(yīng)用詳解
電動(dòng)汽車(chē)驅(qū)動(dòng)電機(jī)的選配原則研究
永磁同步電機(jī)設(shè)計(jì)需要注意哪些參數(shù)?
電動(dòng)汽車(chē)用永磁同步電機(jī)控制系統(tǒng)研究與設(shè)計(jì)
電動(dòng)汽車(chē)用永磁同步電機(jī)的研究
混合動(dòng)力電動(dòng)代步車(chē)用Halbach永磁同步電機(jī)設(shè)計(jì)
HEV用開(kāi)繞組永磁同步電機(jī)雙逆變器協(xié)同控制_孫丹
電動(dòng)汽車(chē)如何使用永磁同步電機(jī)弱磁控制的詳細(xì)資料免費(fèi)下載





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論