") 基于MPU6050與COF屏的航空姿態(tài)儀表
基于MPU6050與COF屏的航空姿態(tài)儀表
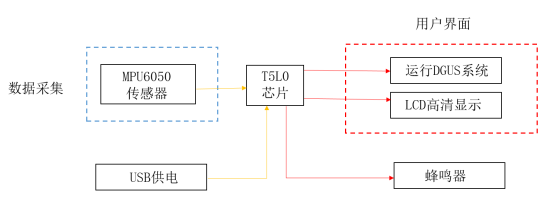
本方案使用COF屏的IO口模擬I2C信號(hào)與MPU6050通訊,實(shí)現(xiàn)航空姿態(tài)儀表可視化顯示。MPU6050采集數(shù)據(jù),T5L0芯片進(jìn)行數(shù)據(jù)讀取和濾波算法處理,計(jì)算出姿態(tài)數(shù)據(jù),驅(qū)動(dòng)COF屏進(jìn)行數(shù)據(jù)實(shí)時(shí)可視化顯示。可視化界面通過(guò)迪文DGUS軟件設(shè)置,有效縮減工程開發(fā)時(shí)間。
方案框圖
http://inforum.dwin.com.cn:20080/forum.php?mod=viewthread&tid=5767&extra=page%3D2
方案簡(jiǎn)介
硬件連接
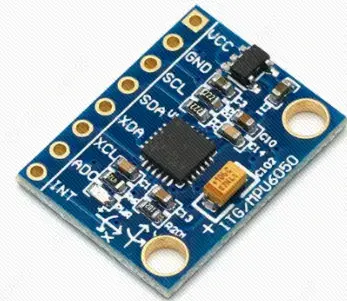
COF屏轉(zhuǎn)接板HDL662S的P32腳連接MPU6050模塊的SDL腳,P33腳連接MPU6050的SDA腳,VCC和GND分別接電源和地。同時(shí),轉(zhuǎn)接板的UART2連接上位機(jī),其中P21~P26六個(gè)IO接入上位機(jī)6個(gè)LED燈上,方便輸出調(diào)試信息,通過(guò)LED顯示運(yùn)行狀態(tài)向COF屏輸出命令。
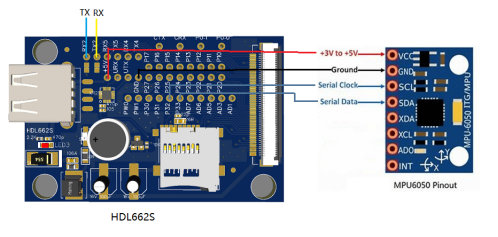
1.1 COF屏與MPU6050模塊連接接線圖

1.2 COF屏與MPU6050模塊連接實(shí)物圖
數(shù)據(jù)讀取主要程序代碼
(1)I2C讀取MPU6050數(shù)據(jù)代碼
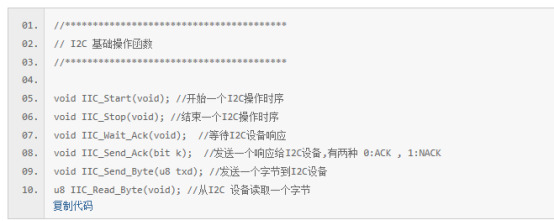
COF屏為用戶提供了可使用的IO口,我們可以直接使用IO口模擬I2C信號(hào)與MPU600通訊。C51 V6例程中有一個(gè)I2C RTC硬件的驅(qū)動(dòng)代碼,基于這個(gè)代碼來(lái)修改,可以得到MPU6050使用的通訊函數(shù)。從I2C RTC硬件的驅(qū)動(dòng)代碼中可移植的主要代碼函數(shù):
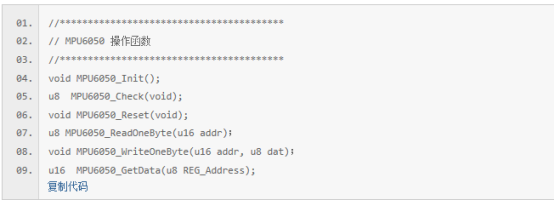
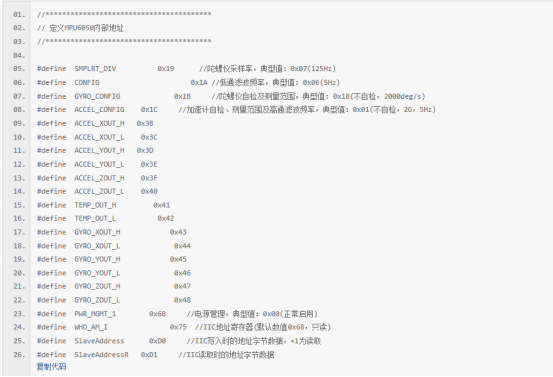
編寫針對(duì)MPU6050的各個(gè)操作命令:
結(jié)合MPU6050寄存器定義設(shè)置,使T5L0成功讀取完整正確數(shù)據(jù)。MPU主要用到的寄存器如下所示:
對(duì)應(yīng)的硬件IO口連接定義端口代碼:
sbit IIC_SCL=P3^2;
sbit IIC_SDA=P3^3;
#define SDA_IN() P3MDOUT=P3MDOUT&0xF7;
#define SDA_OUT() P3MDOUT=P3MDOUT|0x08;
現(xiàn)在,將上述各個(gè)部分的代碼整合編譯調(diào)試上載到COF屏,就能成功讀取MPU6050的各個(gè)寄存器數(shù)值。調(diào)試中需注意:
- MPU6050的I2C主頻與原RTC設(shè)備的主頻有差別,需適當(dāng)調(diào)整I2C函數(shù)操作中的時(shí)序,使其適配;
- T5L處理器速度快,在兩次讀取間要做一定的等待,否則會(huì)出現(xiàn)讀取數(shù)據(jù)為零的情況。經(jīng)反復(fù)測(cè)試,設(shè)置20ms間隔來(lái)讀取傳感器數(shù)據(jù),此間隔對(duì)本實(shí)驗(yàn)完全適用;
- I2C、SDA線接觸一定要良好,否則會(huì)造成通訊中斷,需要重新初始化才能得到正確數(shù)據(jù)。
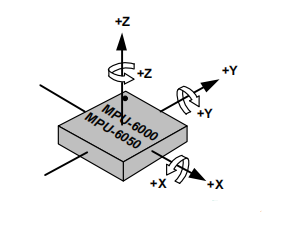
(2)姿態(tài)解算編寫響應(yīng)的函數(shù)對(duì)MPU6050原始數(shù)據(jù)進(jìn)行解算,得到可供幾何顯示和姿態(tài)判斷使用的數(shù)據(jù)。姿態(tài)解算通過(guò)三軸的重力加速度分量得到以地球切面為參照系的三軸夾角轉(zhuǎn)換為以設(shè)備自身坐標(biāo)下的飛行夾角。定義如下:橫滾角Roll(Ф)表示繞X軸的旋轉(zhuǎn),仰俯角Pitch(θ)表示繞Y軸的旋轉(zhuǎn),航向角Yaw (ψ)表示繞Z軸的旋轉(zhuǎn),如圖所示。
計(jì)算代碼算法如下:
roll = atan2(2* Gy*Gz + 2*G*Gx, -2*Gx*Gx -2*Gy*Gy+ 1)
pitch = asin(-2*Gx*Gz + 2*G* Gy)
yaw = atan2(2*( Gx*Gy +G*Gz),G*G+Gx*Gx-Gy*Gy-Gz*Gz)
(3) DGUS界面設(shè)計(jì)
設(shè)計(jì)參考了航空飛機(jī)中常見的G530導(dǎo)航儀儀表面板。面板總體布局分左側(cè)姿態(tài)數(shù)據(jù)顯示區(qū)、中右區(qū)為姿態(tài)主顯示區(qū),以及下方的操作控制區(qū)。
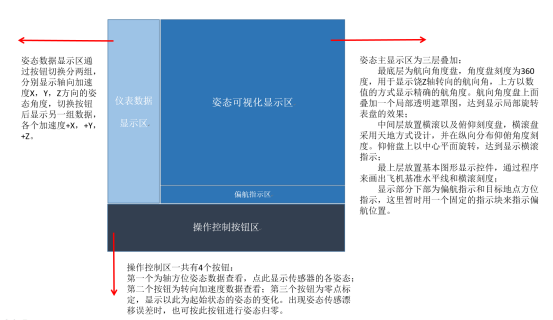
1.4 姿態(tài)儀表顯示分區(qū)設(shè)計(jì)
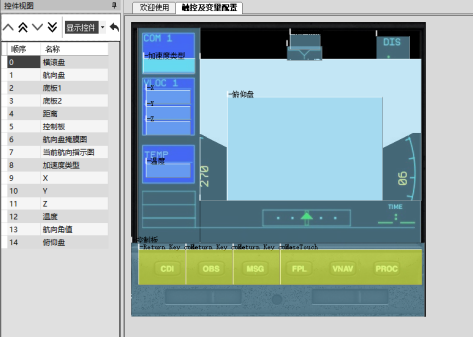
1.5 姿態(tài)儀表DGUS 界面
(4) 可視化C51軟件開發(fā)
C51軟件開發(fā)主要有幾部分:
1. 通過(guò)I2C接口完成MPU6050的讀寫命令操作,從傳感器里獲得完整正確的數(shù)據(jù);
2. 姿態(tài)解算:通過(guò)前面的算法,編寫響應(yīng)的函數(shù)對(duì)原始數(shù)據(jù)進(jìn)行解算,獲得姿態(tài)顯示所需要的顯示數(shù)據(jù);
3.數(shù)據(jù)可視化:將姿態(tài)的各個(gè)角度數(shù)據(jù)轉(zhuǎn)換成UI組件的控制數(shù)據(jù),比如負(fù)數(shù)和小數(shù)的顯示問(wèn)題、量程的問(wèn)題等;
4.開發(fā)必要調(diào)試和跟蹤工具代碼,方便開發(fā)調(diào)試。
這里面通過(guò)數(shù)據(jù)顯示窗口主要顯示7個(gè)數(shù)據(jù),分別為三向的姿態(tài)角度,三軸的加速度以及溫度。同時(shí)根據(jù)三項(xiàng)的姿態(tài)角度計(jì)算可視化的控制數(shù)據(jù)寫入顯示組件地址里:
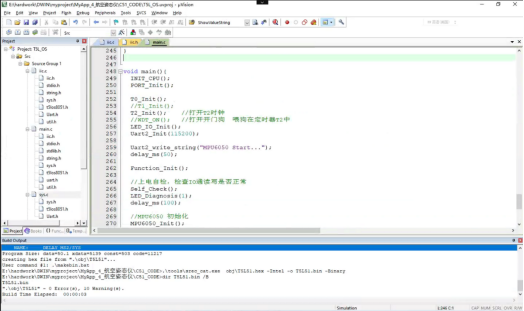
1.6 姿態(tài)可視化C51軟件開發(fā)
COF屏的C51主代碼如下,重要部分已做了注釋。此項(xiàng)目使用T5L的C51操作I2C讀取MPU6050數(shù)據(jù)的代碼已附帶在文件附件中。 mpu6050_i2c.zip用戶開發(fā)體驗(yàn)
“通過(guò)此實(shí)驗(yàn)已經(jīng)完美的獲取了MPU6050六軸陀螺傳感器的數(shù)據(jù)讀取,姿態(tài)解算的方法,同時(shí)結(jié)合COF屏完美的展示了MPU6050姿態(tài)的可視化。在實(shí)驗(yàn)測(cè)試中,COF屏在完成負(fù)載的儀表界面顯示時(shí),依然完成了I2C數(shù)據(jù)讀取,復(fù)雜的浮點(diǎn)計(jì)算,以及內(nèi)存地址操作。在實(shí)際測(cè)試中讀取I2C速度可達(dá)8KBps,能夠在1ms內(nèi)讀取完整的MPU7項(xiàng)數(shù)據(jù),并且在18ms內(nèi)完成了原始數(shù)據(jù)的三角函數(shù)計(jì)算工作,解算出飛航的各個(gè)姿態(tài)數(shù)據(jù),并且更新到顯示屏上。”
-
cof
+關(guān)注
關(guān)注
5文章
48瀏覽量
23276 -
MPU6050
+關(guān)注
關(guān)注
39文章
307瀏覽量
71208
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
CW32模塊使用 MPU6050六軸傳感器
機(jī)智云開源自動(dòng)化控制篇-姿態(tài)翻轉(zhuǎn)報(bào)警器

如何通過(guò)I2C將加速度計(jì)MPU6050型連接到ESP8266?
如何利用中斷從Mpu6050讀取數(shù)據(jù)?
求助求助,MPU6050模塊用DMP時(shí)的自檢問(wèn)題
mpu6050芯片的INT中斷信號(hào)引腳和單片機(jī)之間需要接電阻嗎?
MPU6050 dmp庫(kù)定時(shí)查詢讀取偶爾獲取失敗的原因?
MPU6050勻速轉(zhuǎn)動(dòng)一段時(shí)間后,偏航角不變?cè)趺唇鉀Q?
什么是姿態(tài)傳感器MPU6050





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論