") 功率放大器在壓電振動驅動旋轉機器人制作中的應用
功率放大器在壓電振動驅動旋轉機器人制作中的應用
實驗名稱:基于振動驅動的旋轉及攀爬軟體機器人的研究
研究方向:利用振動驅動原理,設計了能夠實現(xiàn)快速旋轉運動和攀爬運動的兩種軟體驅動結構。
實驗內容:
旋轉軟體機器人具有可實現(xiàn)大變形、柔性接觸、人體友好等特性,在移動機器人、生物醫(yī)學器件等領域具有重要的應用價值。本文主要設計并制作了壓電振動驅動的旋轉軟體機器人,并通過有限元仿真對其運動進行分析,然后研究了施加的激勵力的幅值和角頻率對該機器人旋轉速度影響,最后通過實驗驗證有限元仿真結果。
旋轉軟體機械人的制作實驗設備:
硅膠、PLA、振動電機、鋰電池、亞克力玻璃管、可調直流穩(wěn)壓電源、高速攝像機、3D打印機、精密電子天平、恒溫鼓風干燥箱、電子秒表、信號發(fā)生器、功率放大器、數(shù)碼攝像機。



實驗過程:
旋轉軟體機器人的實驗研究:
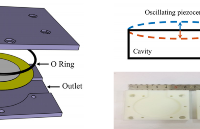
在旋轉軟件機器人的轉速測量實驗中,功率放大器將信號發(fā)生器發(fā)出的激勵信號進行放大,然后激勵信號施加在機器人上。為了測量機器人的旋轉角度,在機器人上標明箭頭,并將其置于坐標紙上,該坐標紙的每小格夾角為30°。使用數(shù)碼相機同步拍攝機器人的運動過程,然后根據(jù)機器人轉過一周所需時間計算機器人的旋轉速度。
實驗結果:
下圖為電壓和頻率對旋轉軟體機器人轉速的影響,其中橫坐標為頻率,縱坐標為機器人的轉速,當施加頻率超過700Hz后,該旋轉軟體機器人旋轉速度存在明顯的規(guī)律,其呈現(xiàn)旋轉速度先增大后減小得趨勢,造成這種現(xiàn)象原因可能是當外加電壓接近機器人的共振頻率時,旋轉軟體機器人的轉速越大。當在電壓400Vpp時,頻率1400Hz,該機器人最大轉速可達118.3r/min,與模擬得到的機器人轉速113.5r/min相近,驗證了理論與數(shù)據(jù)分析結果。

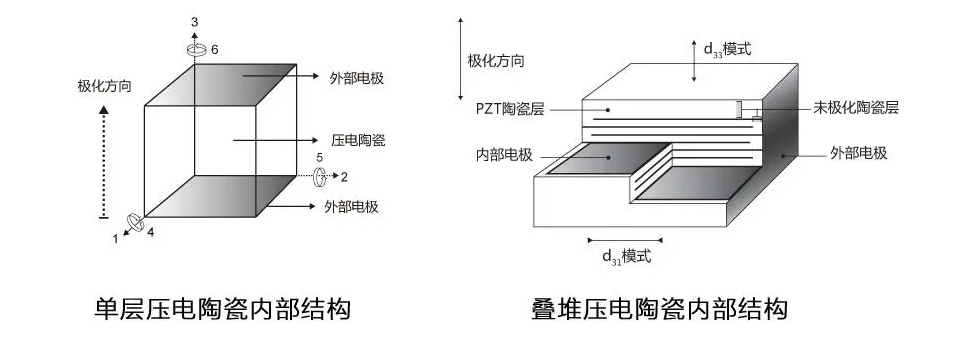
功率放大器在實驗過程中提供了高電壓,施加在機器人上,通過數(shù)值模擬和實驗的結果對旋轉軟體機器人進行了運動機理分析,并通過實驗對其旋轉性能進行了研究對其旋轉性能進行了研究。該機器人通過壓電雙晶片產(chǎn)生振動驅動旋轉軟體結構的觸角周期性下彎和上彈運動,在觸角向下彎運動過程產(chǎn)生的靜摩檫力大于觸角向上彈起運動過程中產(chǎn)生滑動摩檫力,從而產(chǎn)生凈動力,進而在高頻激勵力作用下可以實現(xiàn)快速旋轉。
功率放大器選擇的是ATA-2042,最大可輸出400Vpp的電壓,頻率范圍DC-500KHz,輸出功率最大20W,可以驅動高壓型負載。電壓增益數(shù)控可調,一鍵保存常用設置,提供了方便簡潔的操作選擇,可與主流的信號發(fā)生器配套使用,實現(xiàn)信號的完美放大。
發(fā)布評論請先 登錄
相關推薦
安泰功率放大器驅動壓電陶瓷的應用領域有哪些


功率放大器在合成射流激勵器中的應用
功率放大器的幾種常見類型
功率放大器在合成射流激勵器中的應用
ATA-4051高壓功率放大器在非共振式壓電直線電機性能測試中的應用
射頻功率放大器在翼型壓電振動除冰實驗研究中的應用
功率放大器的工作原理 功率放大器的基本要求
甲乙類功率放大器的特點 甲乙類功率放大器的最大效率為
功率放大器主要放大的是什么
ATA-P系列功率放大器在壓電疊堆中的作用是什么

功率放大器在電磁系統(tǒng)中的應用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論