") PID原理和調(diào)試口訣
PID原理和調(diào)試口訣
(一) PID基本概述:
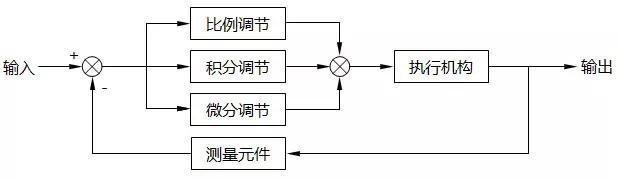
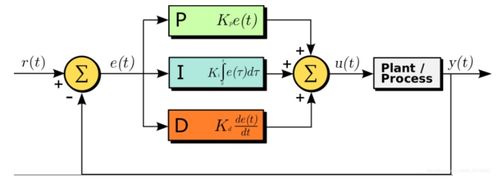 3-1連續(xù)-時間PID控制系統(tǒng)
3-1連續(xù)-時間PID控制系統(tǒng)1,PID是一個閉環(huán)控制算法。因此要實現(xiàn)PID算法,必須在硬件上具有閉環(huán)控制,就是得有反饋。比如控制一個電機(jī)的轉(zhuǎn)速,就得有一個測量轉(zhuǎn)速的傳感器,并將結(jié)果反饋到控制路線上,下面也將以轉(zhuǎn)速控制為例。
2,PID是比例(P)、積分(I)、微分(D)控制算法。但并不是必須同時具備這三種算法,也可以是PD,PI,甚至只有P算法控制。我以前對于閉環(huán)控制的一個最樸素的想法就只有P控制,將當(dāng)前結(jié)果反饋回來,再與目標(biāo)相減,為正的話,就減速,為負(fù)的話就加速。現(xiàn)在知道這只是最簡單的閉環(huán)控制算法。
3,比例(P)、積分(I)、微分(D)控制算法各有作用:
比例,反應(yīng)系統(tǒng)的基本(當(dāng)前)偏差e(t),系數(shù)大,可以加快調(diào)節(jié),減小誤差,但過大的比例使系統(tǒng)穩(wěn)定性下降,甚至造成系統(tǒng)不穩(wěn)定;
積分,反應(yīng)系統(tǒng)的累計偏差,使系統(tǒng)消除穩(wěn)態(tài)誤差,提高無差度,因為有誤差,積分調(diào)節(jié)就進(jìn)行,直至無誤差;
微分,反映系統(tǒng)偏差信號的變化率e(t)-e(t-1),具有預(yù)見性,能預(yù)見偏差變化的趨勢,產(chǎn)生超前的控制作用,在偏差還沒有形成之前,已被微分調(diào)節(jié)作用消除,因此可以改善系統(tǒng)的動態(tài)性能。但是微分對噪聲干擾有放大作用,加強微分對系統(tǒng)抗干擾不利。
積分和微分都不能單獨起作用,必須與比例控制配合。
1、比例控制規(guī)律P:采用P控制規(guī)律能較快地克服擾動的影響,它的作用于輸出值較快,但不能很好穩(wěn)定在一個理想的數(shù)值,不良的結(jié)果是雖較能有效的克服擾動的影響,但有余差出現(xiàn)。它適用于控制通道滯后較小、負(fù)荷變化不大、控制要求不高、被控參數(shù)允許在一定范圍內(nèi)有余差的場合。如:水泵房冷、熱水池水位控制;油泵房中間油罐油位控制等。
2、比例積分控制規(guī)律(PI):在工程中比例積分控制規(guī)律是應(yīng)用最廣泛的一種控制規(guī)律。積分能在比例的基礎(chǔ)上消除余差,它適用于控制通道滯后較小、負(fù)荷變化不大、被控參數(shù)不允許有余差的場合。如:流量控制系統(tǒng);油泵房供油管流量控制系統(tǒng);溫度調(diào)節(jié)系統(tǒng)等。
3、比例微分控制規(guī)律(PD):微分具有超前作用,對于具有容量滯后的控制通道,引入微分參與控制,在微分項設(shè)置得當(dāng)?shù)那闆r下,對于提高系統(tǒng)的動態(tài)性能指標(biāo),有著顯著效果。因此,對于控制通道的時間常數(shù)或容量滯后較大的場合,為了提高系統(tǒng)的穩(wěn)定性,減小動態(tài)偏差等可選用比例微分控制規(guī)律。如:加熱型溫度控制、成分控制。需要說明一點,對于那些純滯后較大的區(qū)域里,微分項是無能為力,而在測量信號有噪聲或周期性振動的系統(tǒng),則也不宜采用微分控制。如:大窯玻璃液位的控制。
4、比例積分微分控制規(guī)律(PID):PID控制規(guī)律是一種較理想的控制規(guī)律,它在比例的基礎(chǔ)上引入積分,可以消除余差,再加入微分作用,又能提高系統(tǒng)的穩(wěn)定性。它適用于控制通道時間常數(shù)或容量滯后較大、控制要求較高的場合。如溫度控制、成分控制等。鑒于D規(guī)律的作用,我們還必須了解時間滯后的概念,時間滯后包括容量滯后與純滯后。其中容量滯后通常又包括:測量滯后和傳送滯后。測量滯后是檢測元件在檢測時需要建立一種平衡,如熱電偶、熱電阻、壓力等響應(yīng)較慢產(chǎn)生的一種滯后。而傳送滯后則是在傳感器、變送器、執(zhí)行機(jī)構(gòu)等設(shè)備產(chǎn)生的一種控制滯后。純滯后是相對與測量滯后的,在工業(yè)上,大多的純滯后是由于物料傳輸所致,如:大窯玻璃液位,在投料機(jī)動作到核子液位儀檢測需要很長的一段時間。總之,控制規(guī)律的選用要根據(jù)過程特性和工藝要求來選取,決不是說PID控制規(guī)律在任何情況下都具有較好的控制性能,不分場合都采用是不明智的。如果這樣做,只會給其它工作增加復(fù)雜性,并給參數(shù)整定帶來困難。當(dāng)采用PID控制器還達(dá)不到工藝要求,則需要考慮其它的控制方案。如串級控制、前饋控制、大滯后控制等。
5,公式:
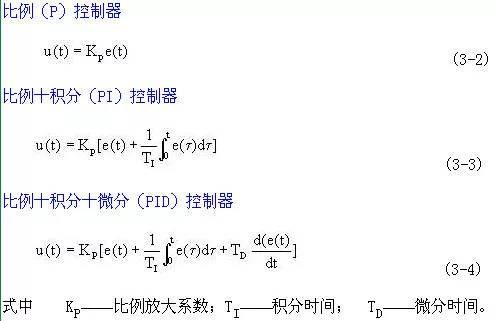
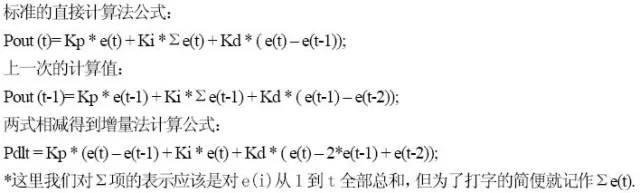
數(shù)值pid的計算:
6,問題。Kp,Ti,Td三個參數(shù)的設(shè)定是PID控制算法的關(guān)鍵問題。一般說來編程時只能設(shè)定他們的大概數(shù)值,并在系統(tǒng)運行時通過反復(fù)調(diào)試來確定最佳值。因此調(diào)試階段程序須得能隨時修改和記憶這三個參數(shù)。
7,參數(shù)的自整定。在某些應(yīng)用場合,比如通用儀表行業(yè),系統(tǒng)的工作對象是不確定的,不同的對象就得采用不同的參數(shù)值,沒法為用戶設(shè)定參數(shù),就引入?yún)?shù)自整定的概念。實質(zhì)就是在首次使用時,通過N次測量為新的工作對象尋找一套參數(shù),并記憶下來作為以后工作的依據(jù)。
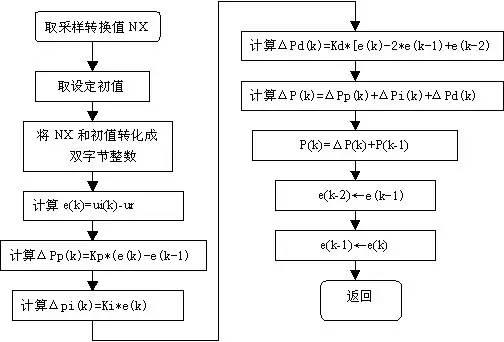
8,pid算法流程圖:
(三)PID參數(shù)調(diào)整口訣:
參數(shù)整定找最佳,從小到大順序查先是比例后積分,最后再把微分加曲線振蕩很頻繁,比例度盤要放大曲線漂浮繞大灣,比例度盤往小扳曲線偏離回復(fù)慢,積分時間往下降曲線波動周期長,積分時間再加長曲線振蕩頻率快,先把微分降下來動差大來波動慢。微分時間應(yīng)加長理想曲線兩個波,前高后低四比一一看二調(diào)多分析,調(diào)節(jié)質(zhì)量不會低
若要反應(yīng)增快,增大P減小I
若要反應(yīng)減慢,減小P增大I
如果比例太大,會引起系統(tǒng)震蕩
如果積分太大,會引起系統(tǒng)遲鈍
 DMC660M運動控制系統(tǒng)
DMC660M運動控制系統(tǒng)
專業(yè)提供工業(yè)自動化運動控制技術(shù)及解決方案!
-
PID
+關(guān)注
關(guān)注
35文章
1471瀏覽量
85292
發(fā)布評論請先 登錄
相關(guān)推薦
8芯光纖顏色順序口訣
如何使用Python實現(xiàn)PID控制
如何調(diào)節(jié)PID參數(shù) PID控制器的調(diào)試方法
如何使用PID進(jìn)行溫度控制
壓水晶頭口訣是什么
第九章-PID整定方法 STM32PID驅(qū)動編碼器 STM32PID控制電機(jī)轉(zhuǎn)速

位置式PID與增量式PID的區(qū)別
電線大小及電流計算口訣
什么是PID?PID各個參數(shù)有什么作用?
調(diào)試CYUSB3314時出現(xiàn)通過Blaster Plus更改PID,復(fù)位/重啟HUB后,數(shù)據(jù)未發(fā)生改變的原因?
什么是pid控制原理 pid各個參數(shù)對系統(tǒng)的影響
變頻器矢量控制的電流環(huán)速度環(huán)調(diào)節(jié)
詳解PID回路控制方案





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論